







目录
🧮 1. Ro_GDIoU(Robust Generalized Distance IoU)
 l论文地址:2409.16149
l论文地址:2409.16149
前言
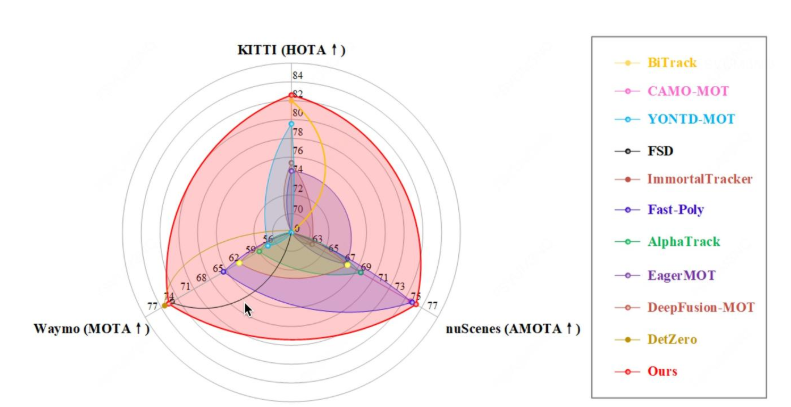
当前的tracknig算法通常只在某一类数据集上能取得较好的效果,但是缺乏泛化性。如上图中detzero,fastpoly等tracking算法只在某个数据集上达到sota,而不能同时在所有数据集上取得sota。论文提出了MCTrack,同时在KITTI, nuScenes和 Waymo数据集上都取得了sota的性能。
此外,由于不同数据集之间的数据格式差异较大,需要花费很多时间来将tracking算法适配到不同的数据集上。论文对于不同数据集提出了一个统一的perception的输出形式,称为BaseVersion,使研究人员能将精力放在算法优化上,而不是处理不同数据集的格式上。
最后对于目前tracking metric的一些局限性,论文提出了一些新的metric,用于评估motion information(速度,加速度)。因为tracking不仅需要能够提供检测框正确的链接,同时也要能为下游任务提供更准确的速度,加速度等信息。
📚一、研究背景
在自动驾驶系统中,3D多目标跟踪(3D Multi-Object Tracking, 3D MOT) 是理解动态环境的关键任务,依赖于高质量的检测器与跟踪算法,将目标在三维空间中持续跟踪。
现有挑战包括:
-
检测器差异性大,难以跨数据集部署统一跟踪器;
-
关联误差大,尤其在稀疏点云、遮挡、雷达等低信噪场景下;
-
缺乏运动信息评估指标,现有指标(如 MOTA、HOTA)主要关注空间位置精度,未能反映对后续规划/预测任务的支持性。
🧭 二、概要
MCTrack 是一个统一、高效、轻量的 3D 多目标跟踪框架,能够适配多种数据集与感知模态。其创新点包括:
-
统一 BaseVersion 表达,兼容 KITTI、nuScenes、Waymo;
-
二阶段跟踪框架(BEV + RV) 提升鲁棒性;
-
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 3011
3011

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









