







人工势场法 APF 山地 路径规划 动态 apf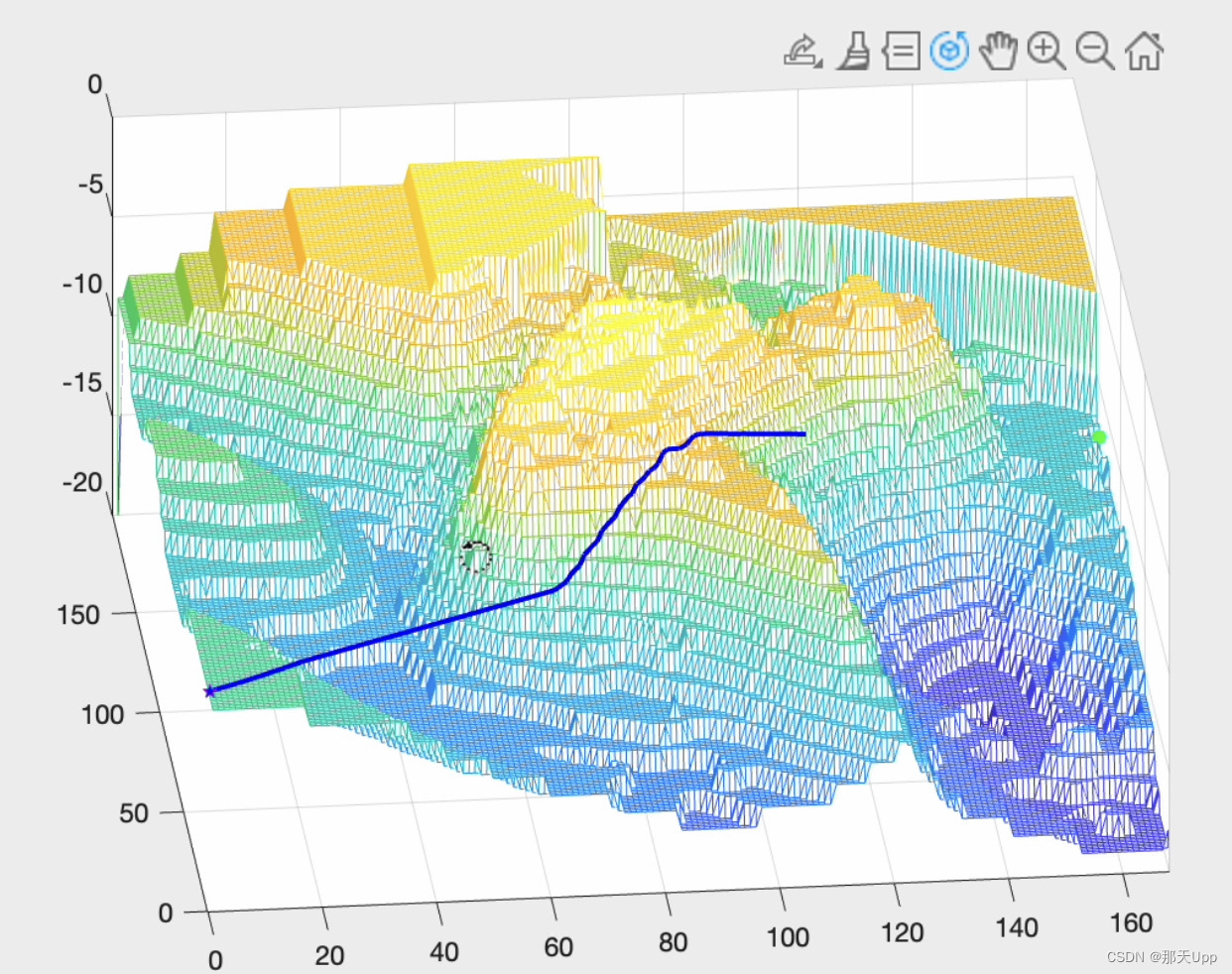
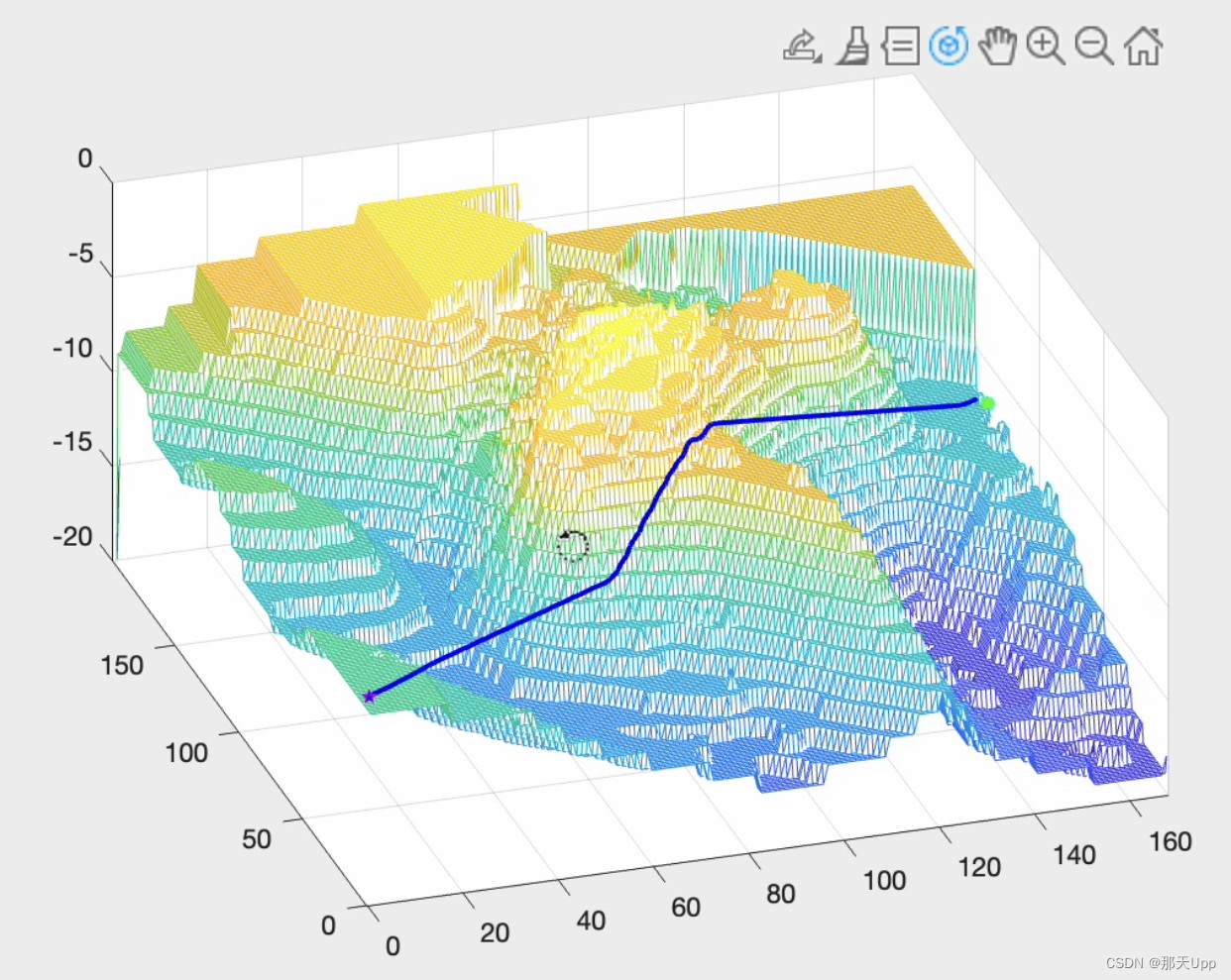
人工势场法 APF 山地 路径规划 动态 apf
 8080
2182
532
8080
2182
532











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























