







1.安装hector_slam库
sudo apt-get install ros-noetic-hector-slam
2.新建slam.launch文件
在lidar_ws/src/rplidar_ros/launch文件夹下新建一个slam.launch文件并打开:
touch ~/lidar_ws/src/rplidar_ros/launch/slam.launch
gedit ~/lidar_ws/src/rplidar_ros/launch/slam.launch将下面的代码复制进去:
<launch>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map" />
<param name="base_frame" value="base_link" />
<param name="odom_frame" value="base_link" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.05"/>
<param name="map_size" value="2048"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<param name="map_multi_res_levels" value="2" />
<param name="map_pub_period" value="2" />
<param name="laser_min_dist" value="0.4" />
<param name="laser_max_dist" value="5.5" />
<param name="output_timing" value="false" />
<param name="pub_map_scanmatch_transform" value="true" />
<!--<param name="tf_map_scanmatch_transform_frame_name" value="scanmatcher_frame" />-->
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.7" />
<param name="map_update_distance_thresh" value="0.2"/>
<param name="map_update_angle_thresh" value="0.06" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="5"/>
<param name="scan_topic" value="scan"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="base_to_laser_broadcaster" args="0 0 0 0 0 0 /base_link /laser 100"/>
<node pkg="rviz" type="rviz" name="rviz"
args="-d $(find hector_slam_launch)/rviz_cfg/mapping_demo.rviz"/>
</launch>
代码解释:
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map" />
<param name="base_frame" value="base_link" />
<param name="odom_frame" value="base_link" />
第一句使得我们能获得map与odom的坐标系变换,这样才能根据地图获得激光雷达目前在地图中的位姿;然后由于没有里程计,因此odom_frame也设置为base_link就可以了。
<param name="map_resolution" value="0.05"/>
<param name="map_size" value="512"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
第一句设置图片分辨率,0.05m/pix;第二句为图片大小;三四句为初始点在图片中的位置,这里为中间。
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="5"/>
<param name="scan_topic" value="scan"/>
第一句设置发布地图的服务,第二句设置读取激光雷达数据的队列长度,第三句设置从哪个topic读取激光雷达是数据。
<node pkg="tf" type="static_transform_publisher" name="base_to_laser_broadcaster" args="0 0 0 0 0 0 /base_link /laser 100"/>
这里直接启动了一个tf中的static_transform_publisher,用来发布base_link与激光雷达的位姿关系,前三个0代表相对位移,后三个0代表转动的欧拉角,然后写出两个相对的坐标系名称,最后一个100是100ms发布一次。
static_transform_publisher具体写法格式如下,第一种为欧拉角形式:
static_transform_publisher x y z yaw pitch roll frame_id child_frame_id period_in_ms
或者四元数形式:
static_transform_publisher x y z qx qy qz qw frame_id child_frame_id period_in_ms
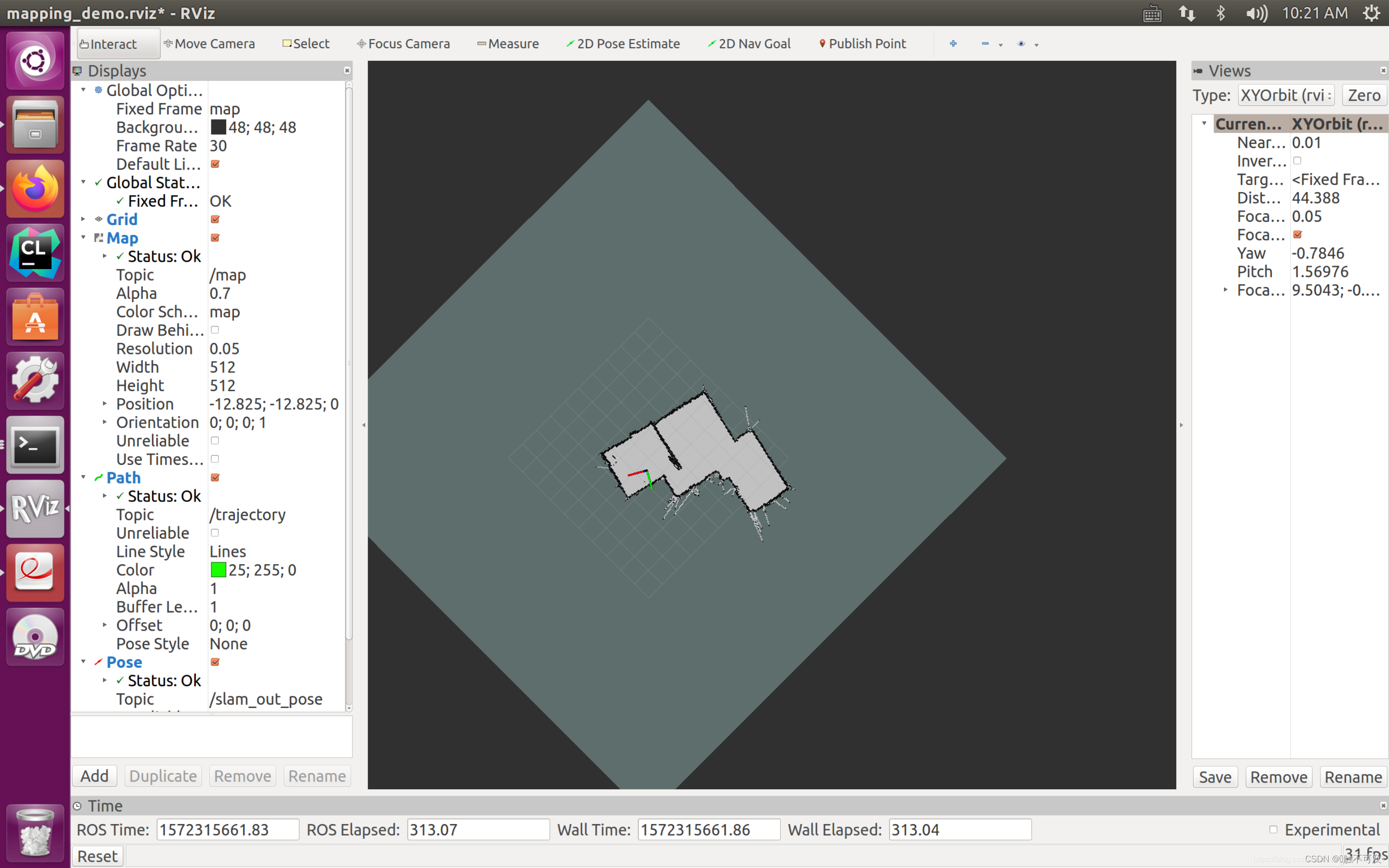
3.打开rviz实现建图(在这一步之前,要按照上一篇博客的方法让雷达先转起来再重新打开一个终端运行下面的命令):
roslaunch rplidar_ros slam.launch此时雷达转动,rviz上开始显示地图样貌,慢慢移动雷达,即可在rviz上查看周围环境的二维地图(保持缓慢移动雷达并保持在同一高度,否则容易造成地图失真)。
4.保存地图信息:
安装map_server包:
sudo apt-get install ros-noetic-map-server
保存图形(在雷达完成建图后,不要关闭rviz,重新打开一个终端,输入下面的命令):
rosrun map_server map_saver -f ~/my_map此时,我们可以在根目录下获得两个文件,分别是my_map.pgm和my_map.yaml,点击my_map.pgm即可查看刚刚建成的地图,my_map.yaml里存放的是地图相关的信息。我们也可以将上面命令中的my_map换成自己想命名的地图文件名称。















 1794
1794











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









