









ROS中最常见的定位包还是gmapping,gmapping是需要里程计的数据也就是IMU或者视觉里程计的数据,但是目前还是仅仅在电脑中测试,并未实现树莓派与飞控通信,因此使用不用里程计数据的hector_mapping首先进行测试并熟悉ROS中建图所需要的基础技能。
首先下载好思岚A1激光雷达对应的ROS包,编译一下,然后启动rviz查看激光雷达获得的点云数据。
roslaunch rplidar_ros view_rplidar.launch
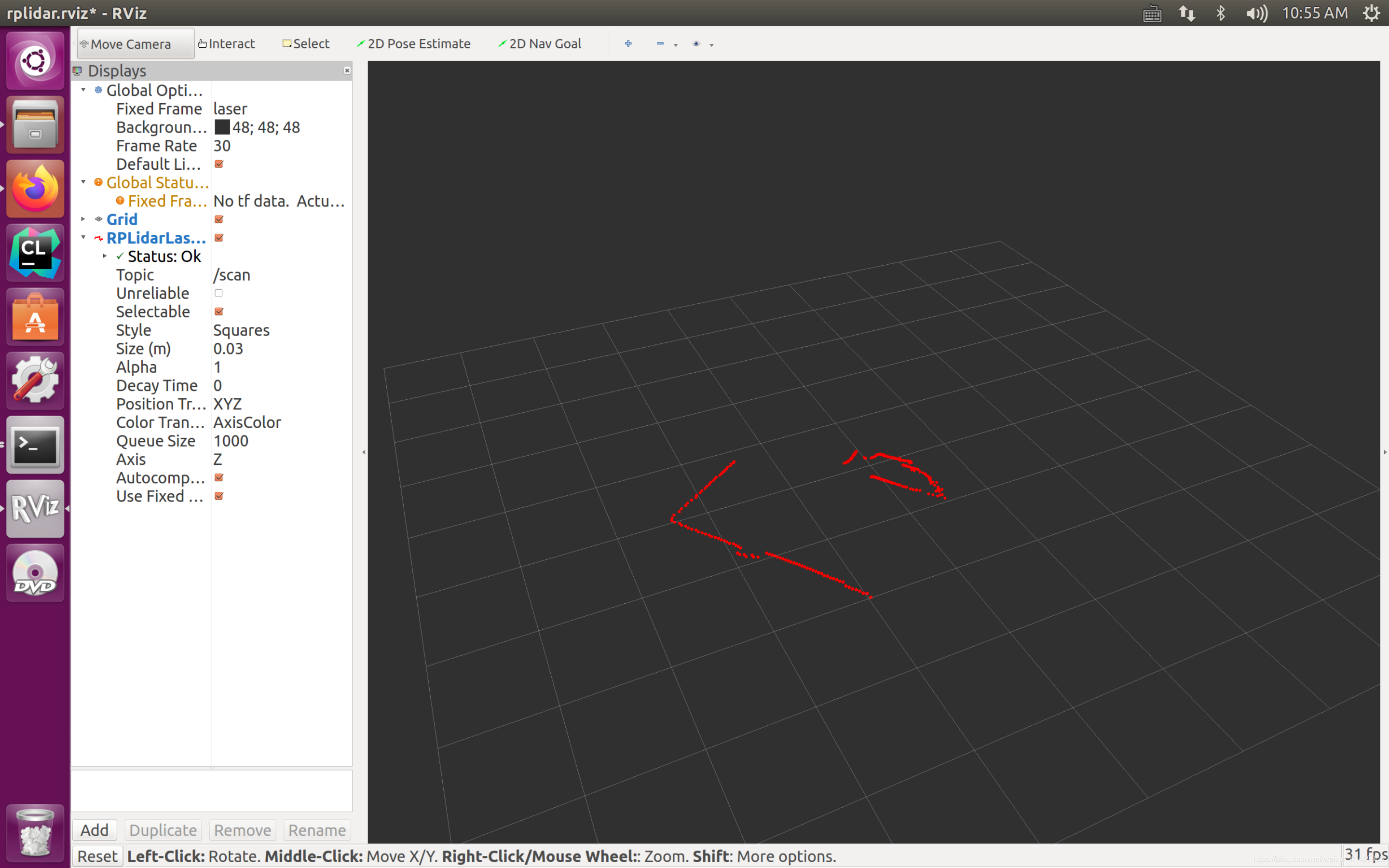
说明激光雷达正常工作。接着安装hector_mapping对应的包:
sudo apt-get install ros-kinetic-hector-slam
接着,写一个launch文件进行hector_mapping的设置与启动。
<launch>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map" />
<param name="base_frame" value="base_link" />
<param name="odom_frame" value="base_link" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.05"/>
<param name="map_size" value="512"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<param name="map_multi_res_levels" value="2" />
<param name="map_pub_period" value="2" />
<param name="laser_min_dist" value="0.4" />
<param name="laser_max_dist" value="5.5" />
<param name="output_timing" value="false" />
<param name="pub_map_scanmatch_transform" value="true" />
<!--<param name="tf_map_scanmatch_transform_frame_name" value="scanmatcher_frame" />-->
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.7" />
<param name="map_update_distance_thresh" value="0.2"/>
<param name="map_update_angle_thresh" value="0.06" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="5"/>
<param name="scan_topic" value="scan"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="base_to_laser_broadcaster" args="0 0 0 0 0 0 /base_link /laser 100"/>
<node pkg="rviz" type="rviz" name="rviz"
args="-d $(find hector_slam_launch)/rviz_cfg/mapping_demo.rviz"/>
</launch>
解释一下代码。
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map" />
<param name="base_frame" value="base_link" />
<param name="odom_frame" value="base_link" />
第一句使得我们能获得map与odom的坐标系变换,这样才能根据地图获得激光雷达目前在地图中的位姿;然后由于没有里程计,因此odom_frame也设置为base_link就可以了。
<param name="map_resolution" value="0.05"/>
<param name="map_size" value="512"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
第一句设置图片分辨率,0.05m/pix;第二句为图片大小;三四句为初始点在图片中的位置,这里为中间。
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="5"/>
<param name="scan_topic" value="scan"/>
第一句设置发布地图的服务,第二句设置读取激光雷达数据的队列长度,第三句设置从哪个topic读取激光雷达是数据。
<node pkg="tf" type="static_transform_publisher" name="base_to_laser_broadcaster" args="0 0 0 0 0 0 /base_link /laser 100"/>
这里直接启动了一个tf中的static_transform_publisher,用来发布base_link与激光雷达的位姿关系,前三个0代表相对位移,后三个0代表转动的欧拉角,然后写出两个相对的坐标系名称,最后一个100是100ms发布一次。
static_transform_publisher具体写法格式如下,第一种为欧拉角形式:
static_transform_publisher x y z yaw pitch roll frame_id child_frame_id period_in_ms
或者四元数形式:
static_transform_publisher x y z qx qy qz qw frame_id child_frame_id period_in_ms
最后就是启动rviz了。我们来看一下绕房子一圈的效果:
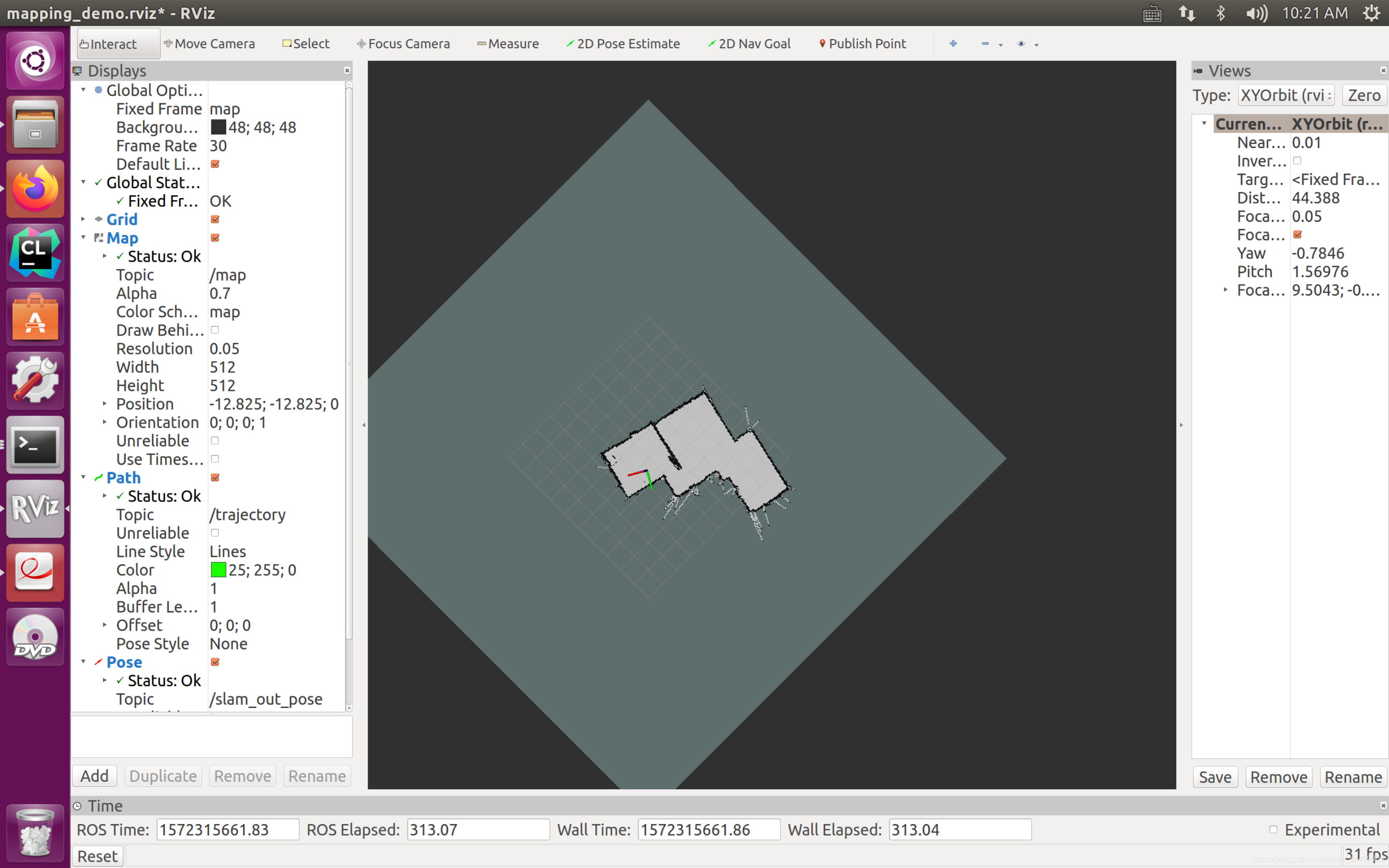
效果还可以,因为是举着的很难保证高度一致,因此同一个地方走回来的时候可能会有偏差,也就是散出去的那些地方。
我们把这个地图保存下来:
先安装map_server包:
sudo apt-get install ros-kinetic-map-server
然后保存:
rosrun map_server map_saver -f ~/my_map
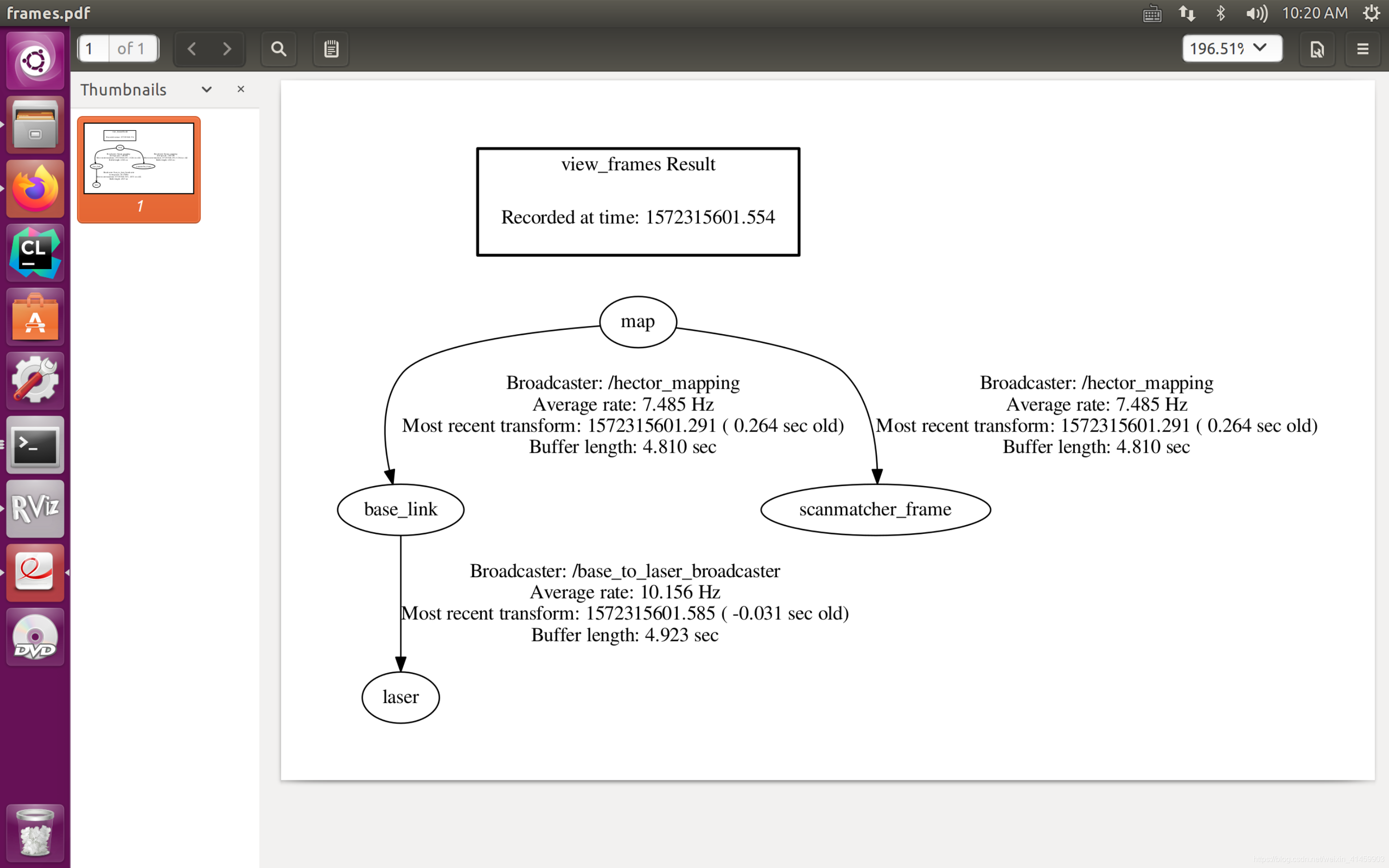
然后我们用下列tf命令行看一下现在坐标系的关系:
rosrun tf view_frames
evince frames.pdf
我们来看一下hector_mapping运行时的节点和话题关系:
rqt-graph
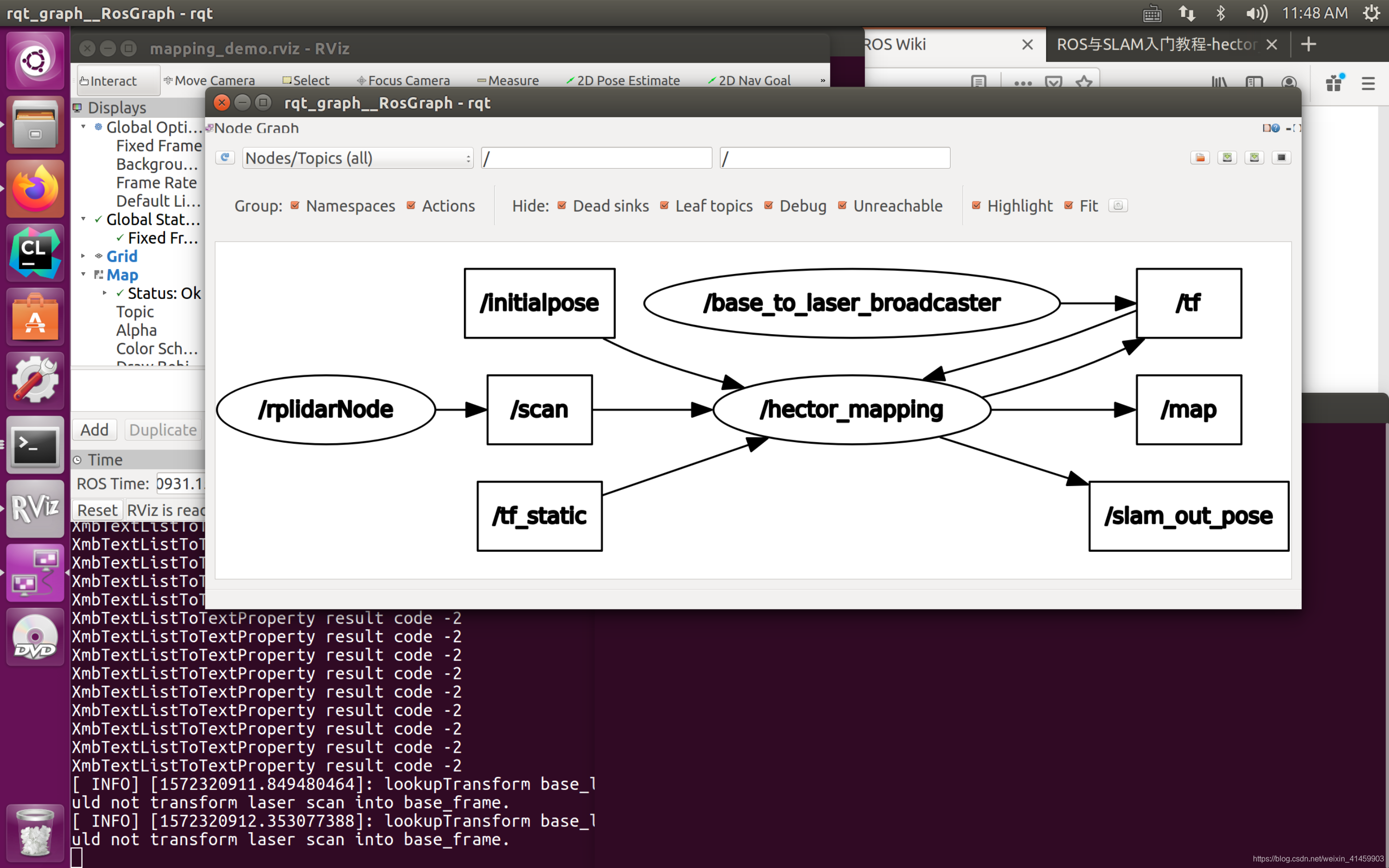
我们可以看到hector_mapping订阅了激光雷达节点发布的/scan话题和base_link与laser的tf,发布了base_link与map的tf,还发布了/map话题,这是一个珊格地图类型的msg,还有一个姿态,这里的姿态并不是base_link相对于map的姿态,因此我们想要获取base_link的姿态,需要手动获取对应的tf:
rosrun tf tf_echo /map /base_link
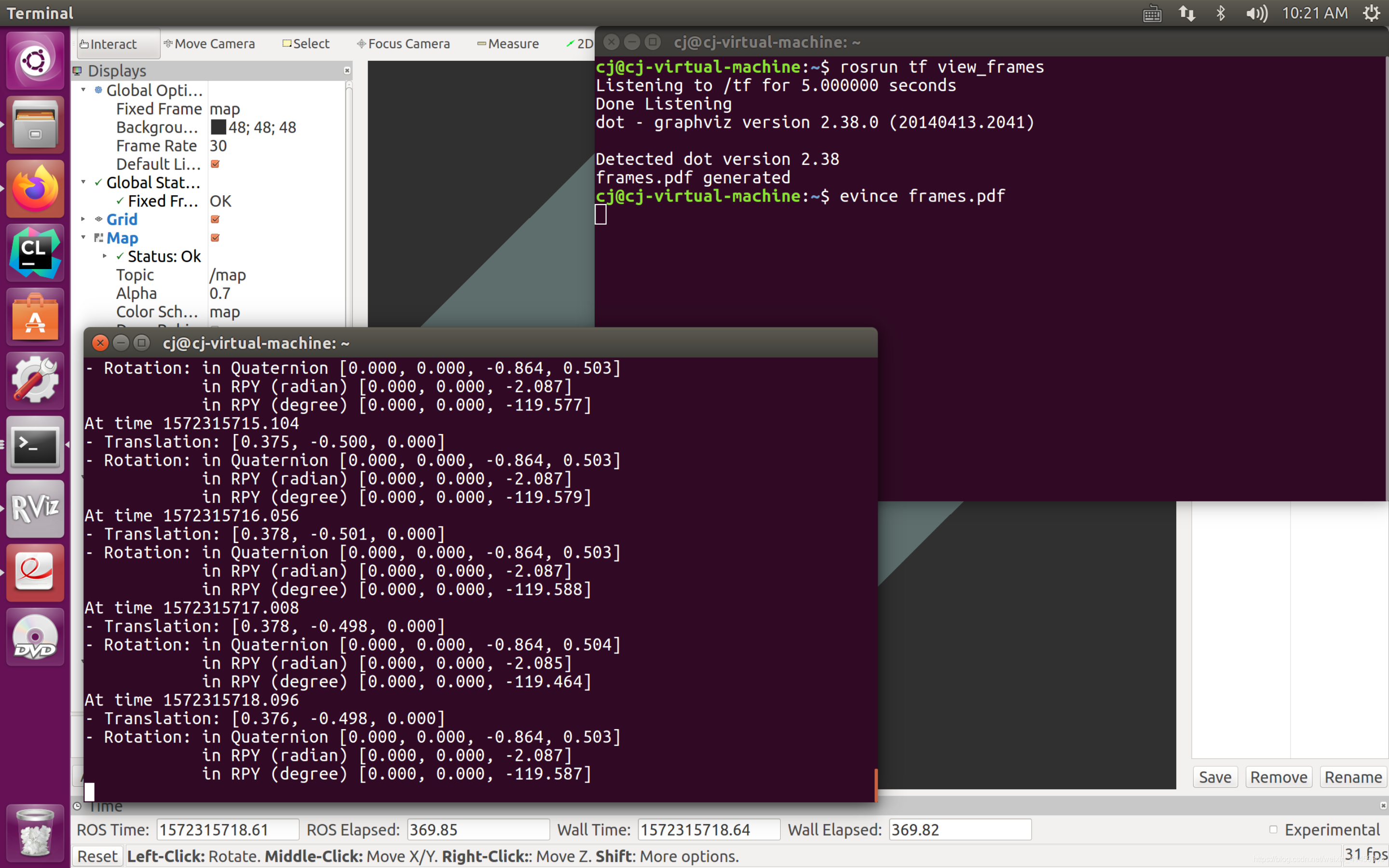
Translation是平移量,后面分别为四元数与欧拉角形式的转动量。致此,我们完成了用hector_mapping完成建图并且获取当前激光雷达在图坐标系中的位姿信息。

















 4516
4516

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









