






参考链接:https://blog.csdn.net/Kalenee/article/details/95889898
一、运动轨迹算法
使用moveit自带的三种规划器,根据设定的最大速度和加速度,可以计算给定路径下的路径点信息,主要是路径点、速度、加速度和时间帧。
轨迹点:可通过插补获得,数据类型为 moveit_msgs::RobotTrajectory
设定的最大速度和加速度:为URDF文件中设定参数
规划器:
moveit总共提供三种规划器:
- 1、Time-optimal Trajectory Parameterization(算法原理:Time-Optimal Path Following (July 2012))
- 2、Iterative Spline Parameterization
- 3、Iterative Parabolic Time Parameterization
1的分析:
1、该规划器输出轨迹为等时间间距(其余为等距)
2、该规划器在小间距下规划的速度和加速度较其余两种优化算法更加合理与平滑,在较大间距下三种规划算法效果差距不大,良好的规划间距会因机械臂参数的不同而有所不同。
3、在过小间距下(0.001s)插补,会出现运动规划不恒定,规划速度不平滑的现象,经测试在0.005s(不同机械臂不一致,同时需要根据控制器输出频率等确定)的规划间距下可以有较为稳定和理想的规划效果。
3的分析:
- 该运动规划器为moveit默认使用规划器,可以实现速度和加速度平滑,但无法避免加速度的抖动,详细参考Improve time parameterization。
- 该规划器等间距插补,平滑速度和加速度,适合用在低速精确轨迹控制下。
2、数据处理
当在作机械臂关节信息分析时,可以用到rosbag记录topic数据
rosbag record -a #记录所有topic数据
#指定bag名(out)
rosbag record -O out.bag /topic1_name /topic2_name /xxx
#bag包转excel文件
rostopic echo -b <bagfile> -p <topic> > <output>.csv
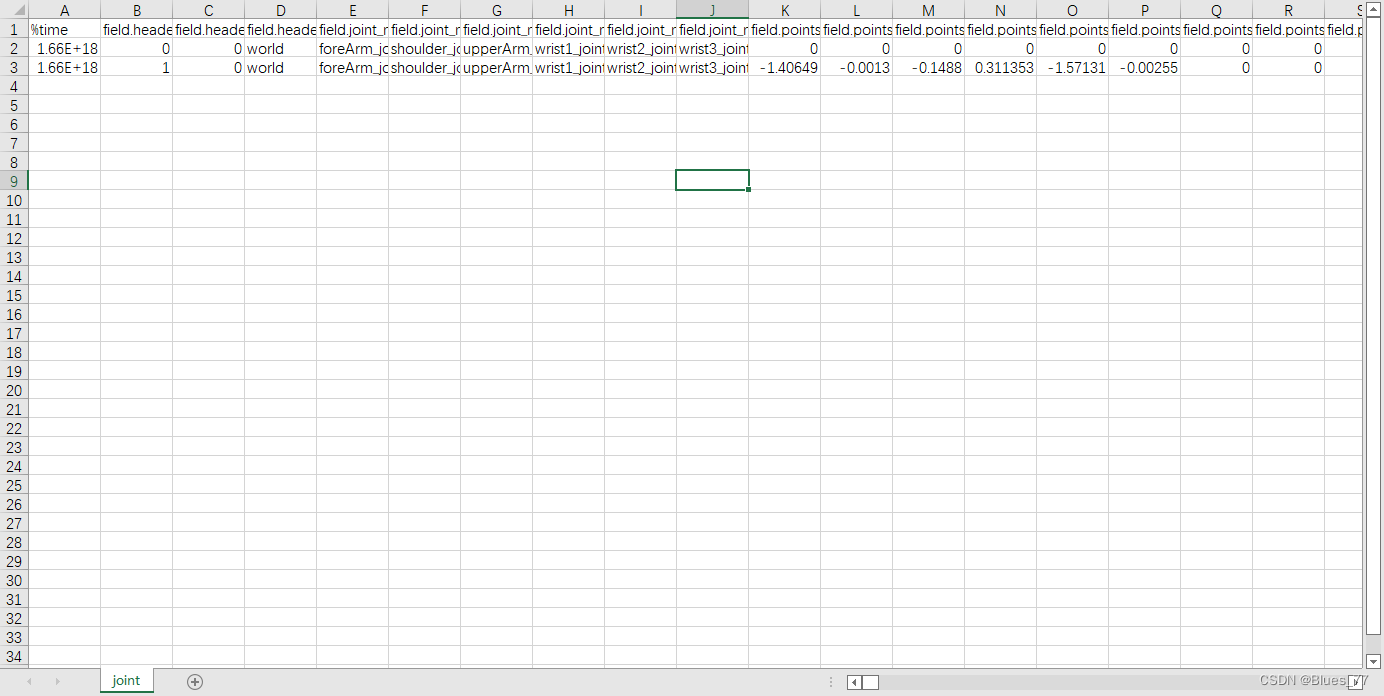
#其中bagfile就是存储的bag名字,topic为bag中想要提取的话题名字转为excel文件之后,就可以用excel打开对数据进行一个提取处理。
3、隔行提取数据
原始的数据是三行离散数据,按照一定规律隔行排列,因此需要隔行进行提取
先选中数据,复制,粘贴时选择转置,将数据转置。
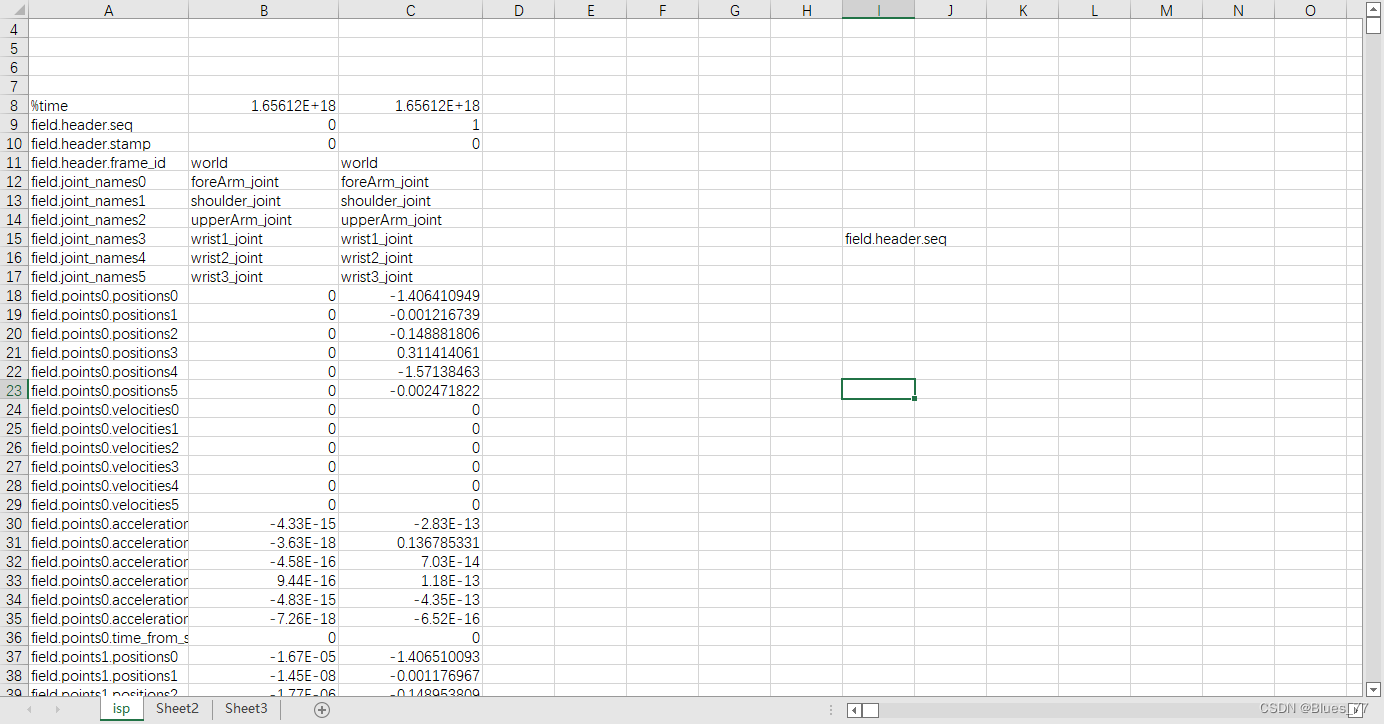
提取需要的一列数据,其中第二列代表机械臂从零位置到达“home”位置的数据,第三列代表机械臂从“home”位置出发到达之后的路径点。
提取第三列数据,复制粘贴到新建的一个列表中,并进行隔行的提取:
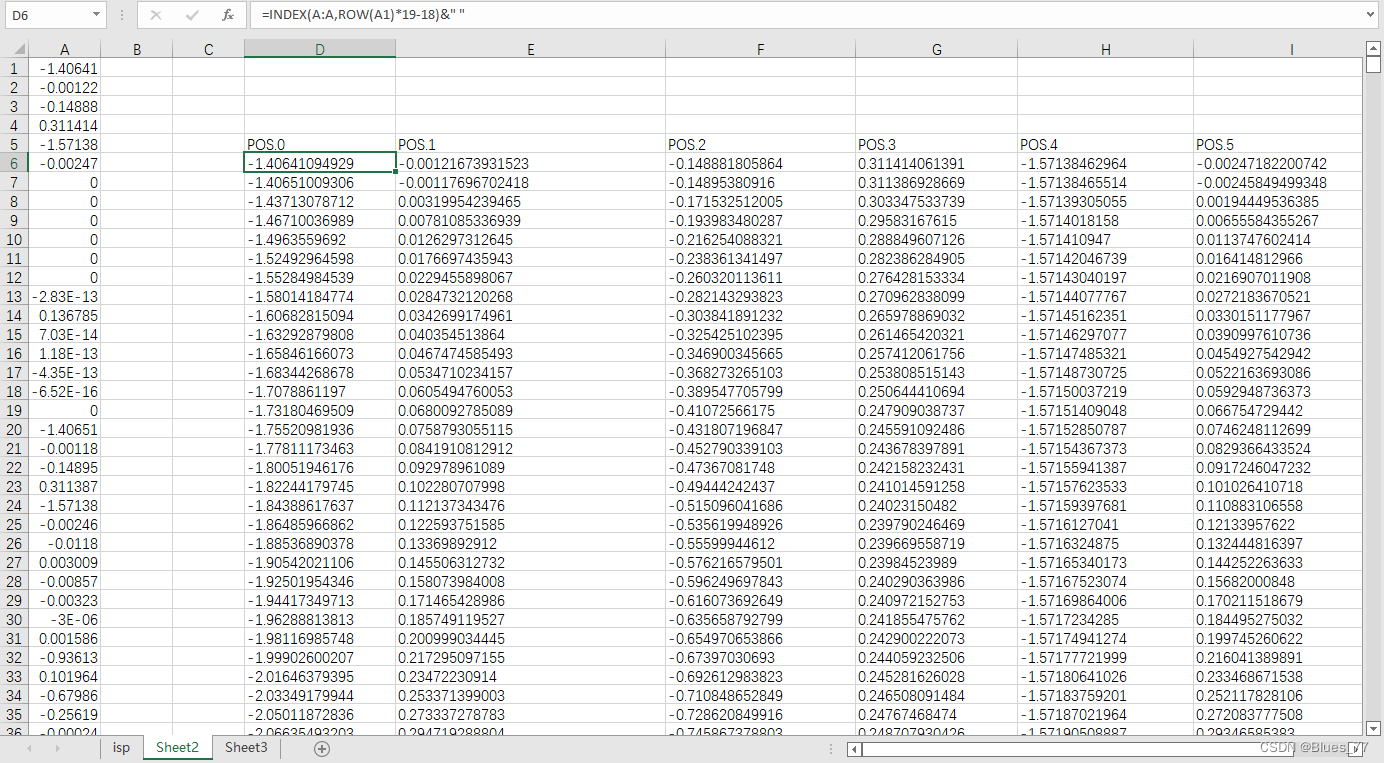
所用的隔行的函数:=INDEX(A:A,ROW(A1)*19-18)&" "
从第一个数据到第二个数据中间间隔了18个数据,其中19-18代表A列第一个数据开始隔行提取,以此类推。
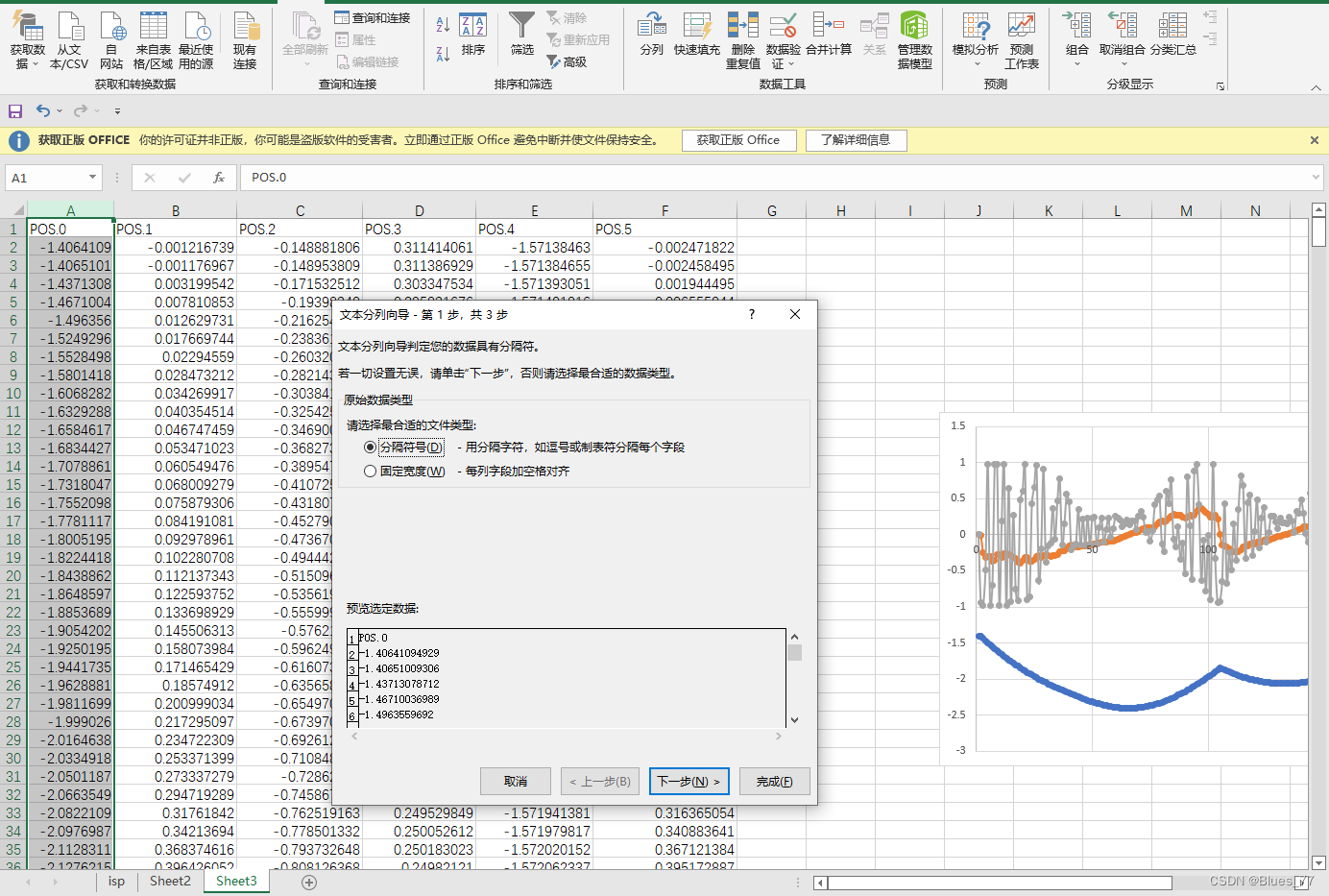
4、数据数字化
当所有数据提取完成后,数据仍然不能在excel中进行图像绘制,此时选中一列,点击分列,下一步到底就可以了:

















 560
560

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









