






导航在这里:
Baize_H1mini六足机器人制作教程(开源)_ros 六足机器人教程-CSDN博客
视频教程:手把手带你做开源六足机器人(3D图纸+硬件图纸+软件源码+制作说明书在视频下方自取!)_哔哩哔哩_bilibili
你现在在地图的红色字体位置(走到终点就制作完成了):
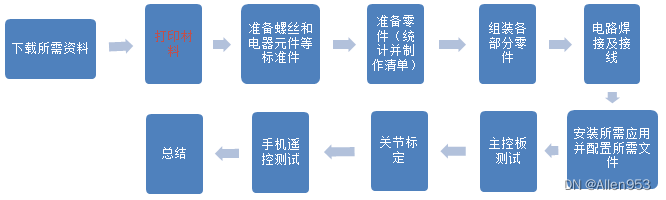
重要提示:自己使用打印机打印零件时,对于新手来说肯定会由于参数设置问题将零件打废,因此要仔细配置参数确保参数正确。对于需要添加支撑的零件,一定要记得添加支撑。
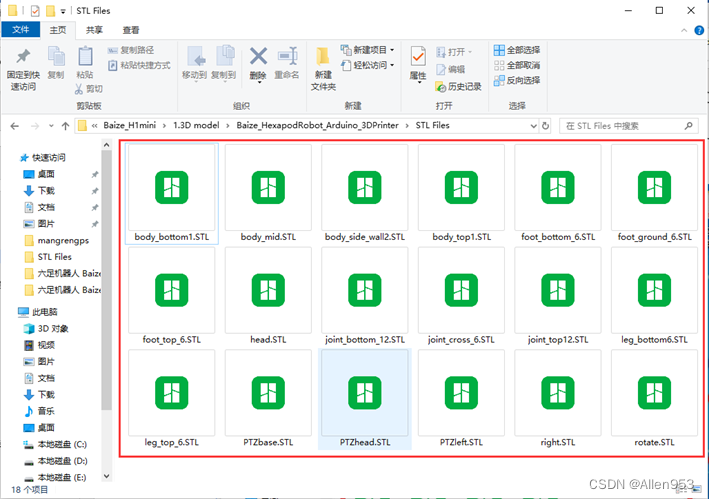
首先要找到零件的图纸,打开我们刚刚下载的整个项目资料文件夹,找到如下路径1.3D model\Baize_HexapodRobot_Arduino_3DPrinter\STL Files,可以看到该文件夹下有很多可以打印的STL格式图纸,如下图2-2-1红框中所示:
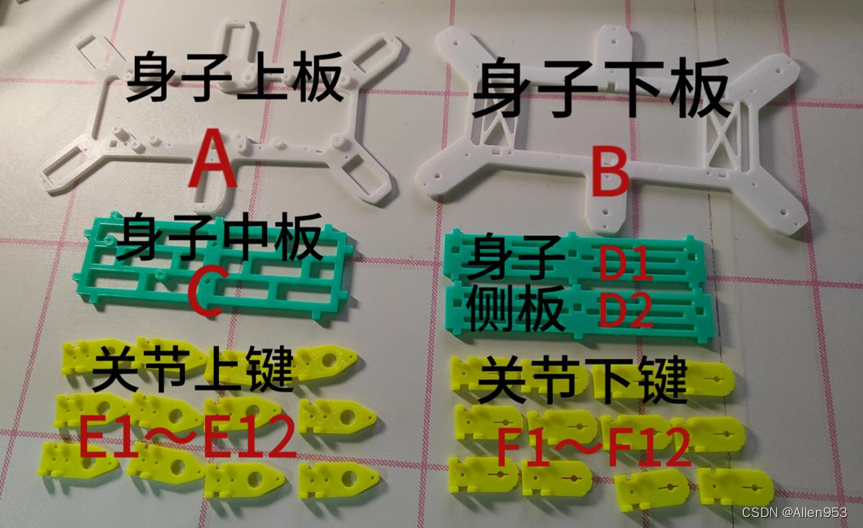
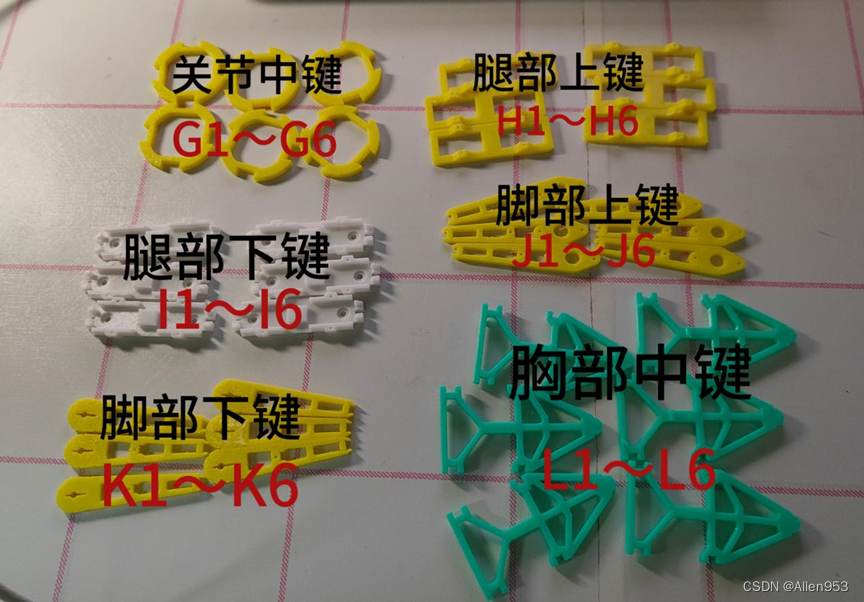
接下来就可以开始打印了,完成之后的实物如下图所示:


















 939
939











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











