







turtlebot的gazebo仿真出现了问题尚未解决,但似乎不影响使用。
参考微尘的https://blog.csdn.net/Hu_weichen/article/details/86708684
进行了SolidWorks转化urdf模型,并导入gazebo
与turtlebot出现了同样的问题:
[Err] [ClientConfig.cc:270] Parser error [4]
[Err] [ClientConfig.cc:270] Parser error [4]
参考http://answers.gazebosim.org/question/23303/err-clientconfigcc270-parser-error-4/
按照答案的第二条执行之后,
出现[Err] [REST.cc:205] Error in REST request
然后
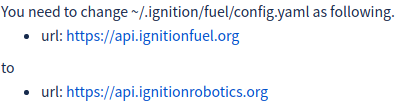
问题解决。

模型导入之后一般进行环境搭建,添加传感器等等。不过本文主要针对运动控制,所以直接进行运动控制的相关学习。
gazebo,在空环境中加入自己写的urdf文件
参考https://blog.csdn.net/shankezh/article/details/516
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 821
821











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









