







什么是拖尾现象
理想的激光脉冲打在目标上是一个点,但是实际上激光出射都存在一定的发散角,打在物体上时光斑是一个面。因此,当存在前后两个物体,且激光正好打在前面一个物体的边缘时,就有可能出现一部分激光能量打在了后面的物体上,这时的回返光就是两个光斑反射光的叠加。这时雷达会判断测量目标在这两个面之间,造成拖尾现象。
如何解决该问题
发生拖尾现象时,激光束呈射线状,我们可以根据这一现象来去除问题数据。据此得到下图中的数学问题:
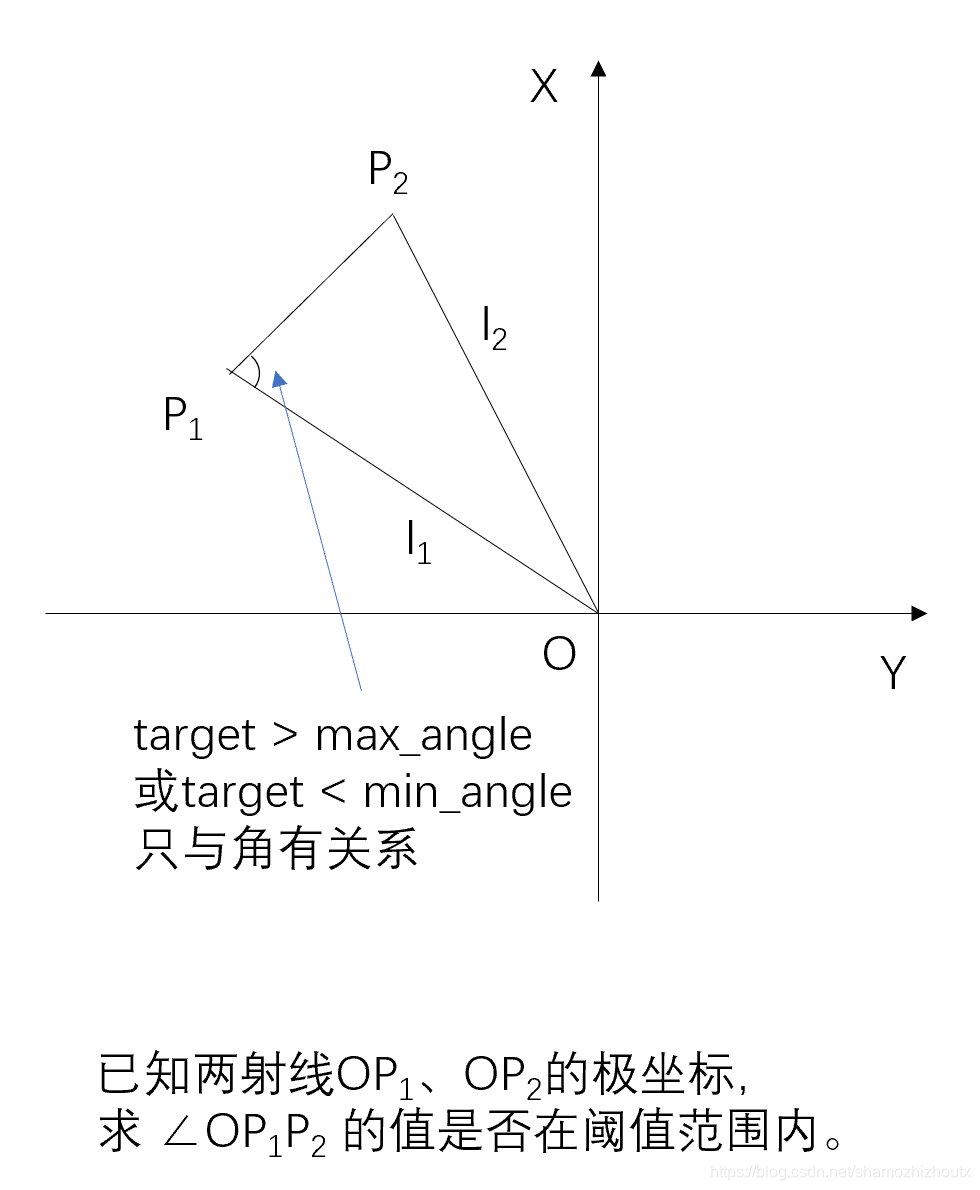
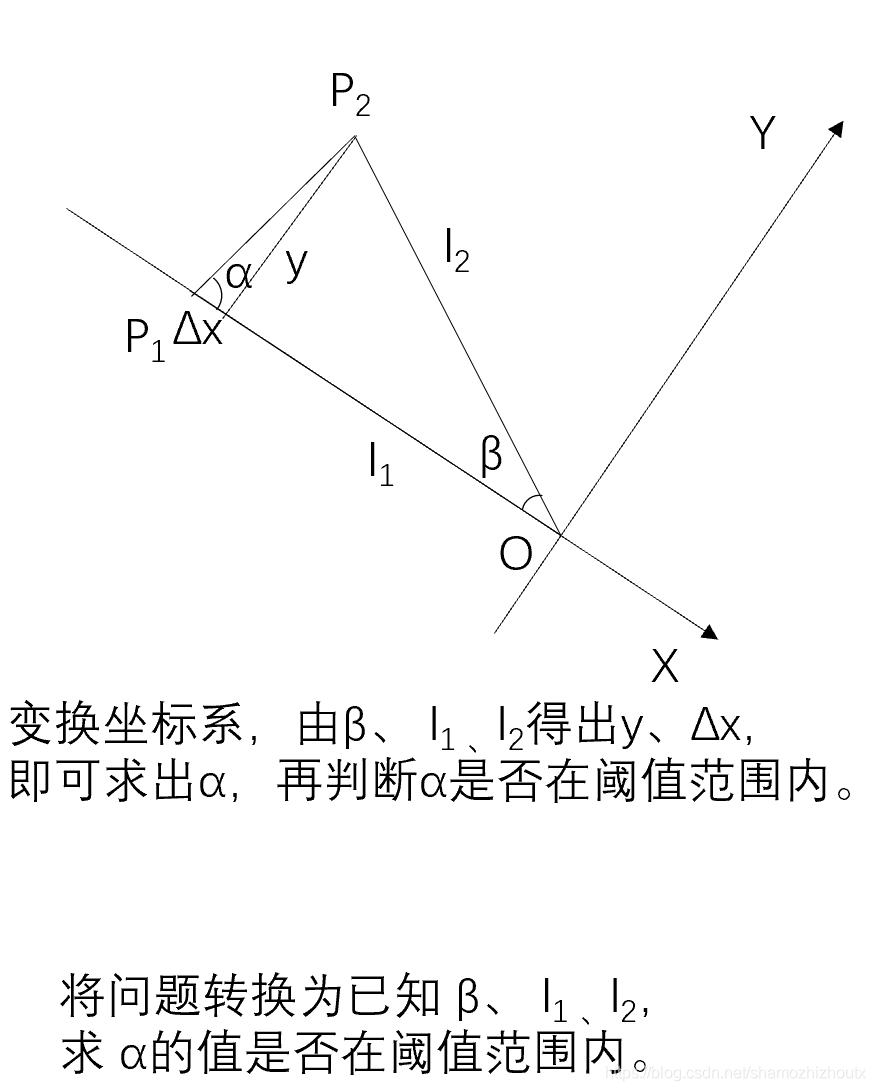
转换坐标系,可以比较容易得出目标角,从而判断目标角是否在阈值范围内。
代码实现
本着不重复造轮子的原则,我们可以用laser_filters包中的ScanShadowsFilter插件来移除有拖尾(veiling effect)现象的数据。如上图所示,假设激光的原点是
O
O
O,对于任何两个点
P
1
P_1
P1和
P
2
P_2
P2,则形成角
∠
O
P
1
P
2
\angle{OP_1P_2}
∠OP1P2,如果该角度小于最小阈值角度(min_angle)或大于最大阈值角度(max_angle),我们将该点及其附近符合条件的点移除。
参数:
min_angle (double)
最小阈值角度(角度制)
max_angle (double)
最大阈值角度(角度制)
window (int)
需要计算的目标角的窗口大小
neighbors (int)
需要删除拖尾数据附近数据(且该数据大于拖尾数据)的个数
测试结果
scan_filter_chain:
- name: shadows
type: laser_filters/ScanShadowsFilter
params:
min_angle: 5
max_angle: 175
neighbors: 3
window: 2
remove_shadow_start_point: false
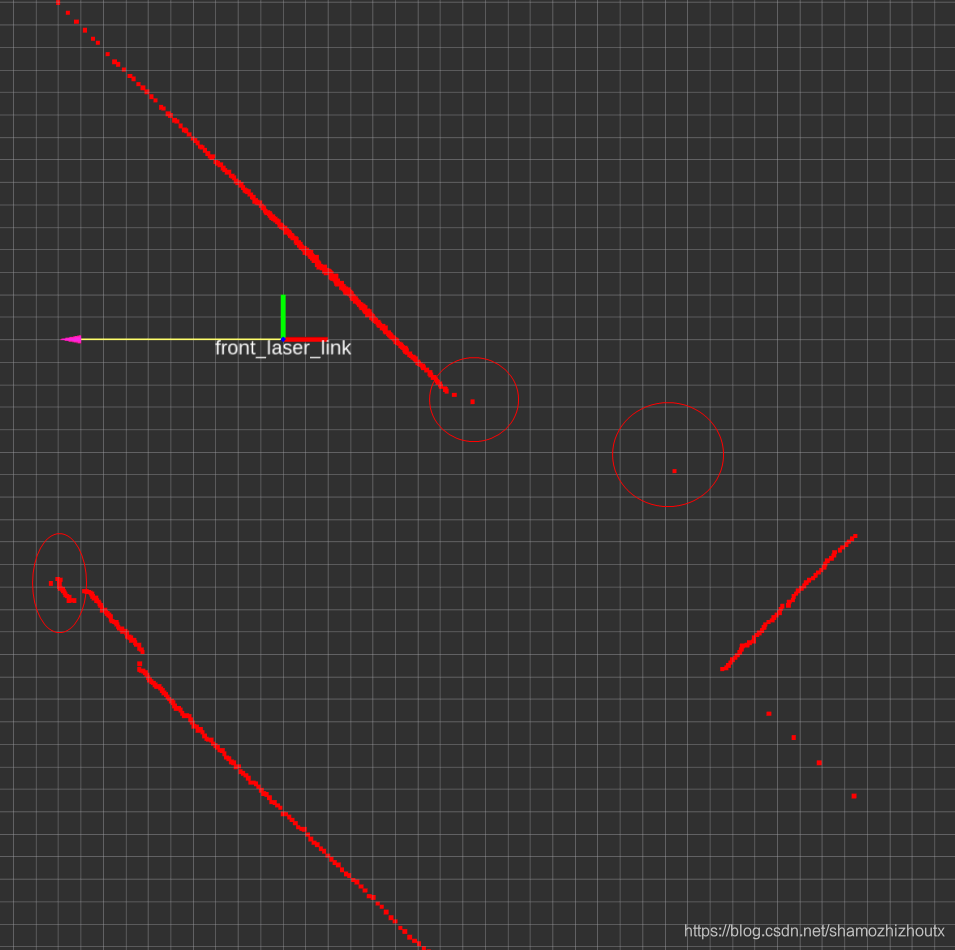
过滤前,可以看到存在拖尾现象的数据有三处,如下图所示:
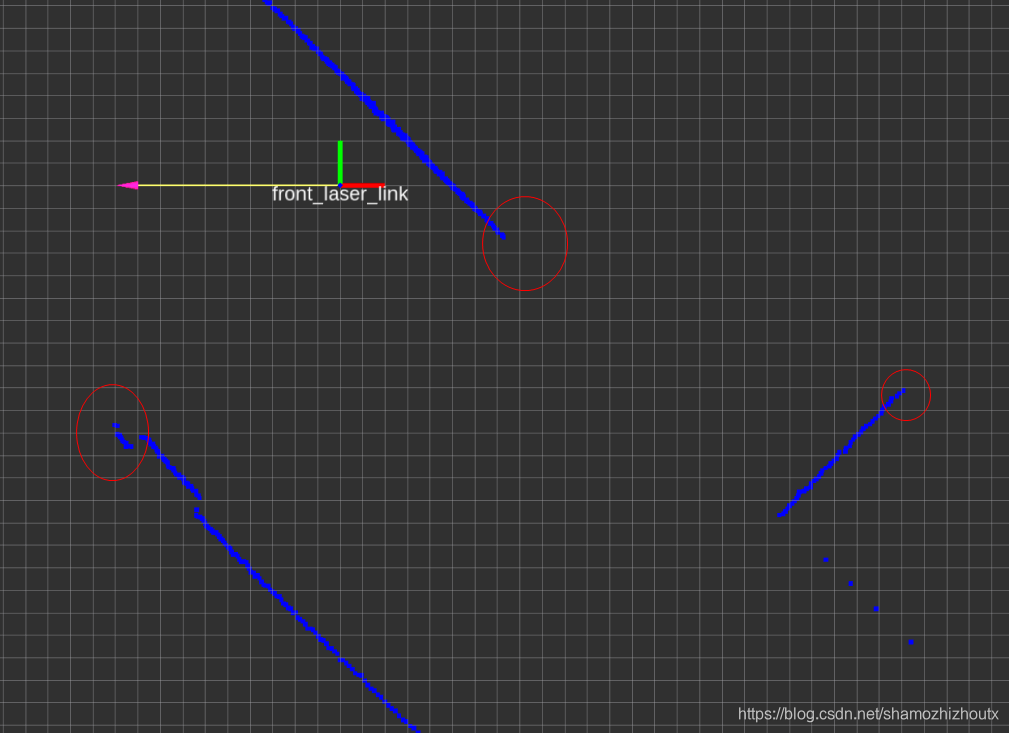
过滤后,如下图所示,存在拖尾现象的数据已被滤除,但是正常数据也被移除了一部分,可以通过调节neighbors大小来减少影响。

















 685
685

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









