







平台
ubuntu 14.04
Ros indigo
依次运行以下命令
运行仿真的turtlebot
roslaunch rbx1_bringup fake_turtlebot.launch
加载地图
roslaunch rbx1_nav tb_demo_amcl.launch map:=blank_map_with_obstacle.yaml
kinect连接
roslaunch rbx1_bringup turtlebot_fake_laser_freenect.launch
rviz显示
rosrun rviz rviz -d `rospack find rbx1_nav`/nav_test.rzi
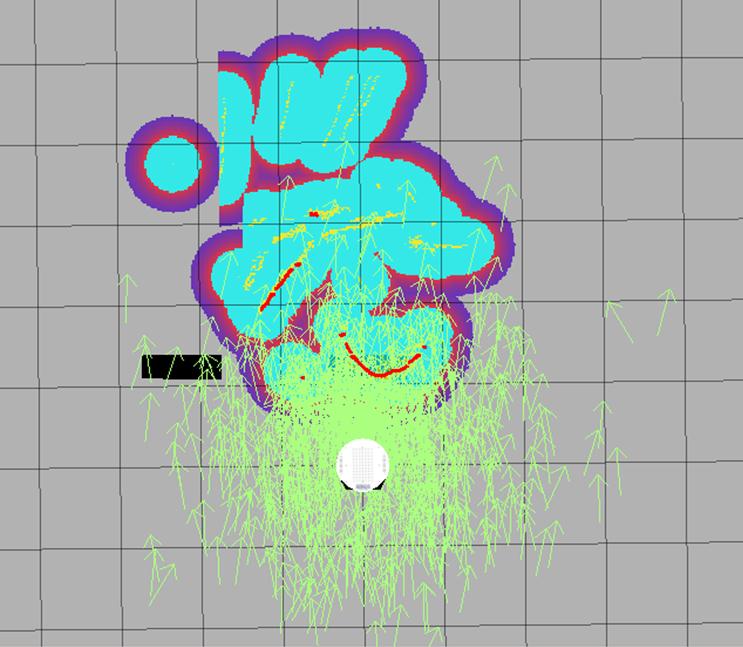
可以看出,红色的点云数据在地图中有显示,障碍物越远,点云离机器人越远,障碍物很近时,点云消失,如下图
















 387
387

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











