






点云PCL免费知识星球,点云论文速读。
文章:LiDARTag: A Real-Time Fiducial Tag System for Point Clouds
作者:Jiunn-Kai Huang, Shoutian Wang, Maani Ghaffari, and Jessy W. Grizzle
编译:点云PCL
代码:https://github.com/UMich-BipedLab/LiDARTag.git
来源:arxiv 2021
欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。文章仅做学术分享,如有侵权联系删文。未经博主同意请勿擅自转载。
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。
摘要
基于图像的基准标记物在杂乱或无纹理环境中的目标跟踪、相机(和多传感器)校准任务以及基于视觉的同时定位和建图(SLAM)等问题中非常有用,基准标记物的检测算法的现状取决于环境照明的一致性,本文介绍了一种适用于LiDAR点云的新型基准标记物的设计和检测算法LiDARTag,该方法可实现实时运行,处理100Hz的数据,比目前可用的激光雷达传感器频率更快,由于激光雷达传感器的性质,快速变化的环境照明不会影响激光雷达探测;因此,提出的基准标记物可以在完全黑暗的环境中工作,此外,LiDARTag与现有的视觉基准标记(如AprilTags)很好地互补并兼容,从而实现高效的多传感器融合和校准任务。并且本文进一步提出了一个最小化点云和标记模板之间的拟合误差的概念来估计标记物的姿态,该方法实现了毫米级的平移误差和几度的旋转误差。由于激光雷达回波的稀疏性,点云被提升为kernel Hilbert 空间中的连续函数,内积可用于确定标记的ID。通过运动捕获系统验证的实验结果证实,该方法能够可靠地提供标记物的姿势和唯一的ID,在室内数据集和本田H3D室外数据集上进行了验证。
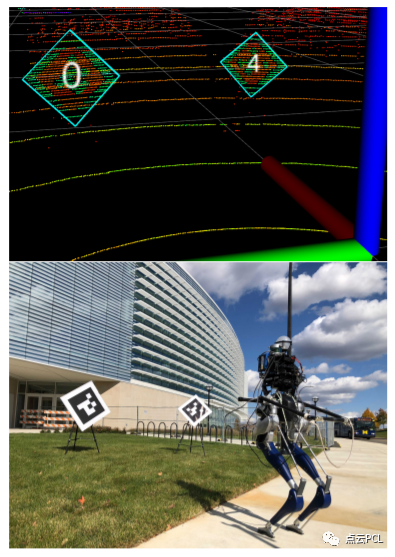
图1:基于激光雷达的标记物可以与基于相机的标记一起使用,以解决图像对环境照明敏感的问题,此图显示了点云扫描数据中两种不同大小的Lidartag的可视化。
主要贡献
本文提出的LIDARTag系统利用激光雷达的强度测量来解码其ID,因此,需要具有稳定(良好)强度读数的激光雷达。其主要贡献:
1)我们提出了一种新颖灵活的点云基准标记LiDARTag,它与现有的基于图像的基准标记物系统(如AprilTag)兼容。
2) 我们开发了一种鲁棒的实时方法来估计LiDARTag的姿态,最优姿势估计使点云和已知几何体的标记模板之间的L1拟合误差最小化。
3) 为了解决激光雷达回波的稀疏性,我们将点云提升为RKHS中的连续函数,并使用内积结构在预先计算的函数字典中确定标记的ID。
4) 我们介绍了LiDARTag的性能评估,其中真值数据由运动捕捉系统提供,我们还广泛分析了在宽敞的室外和杂乱的室内环境中的检测效果。此外,我们还研究了在室内谷歌数据集和室外本田H3D数据集上验证的误报率。
5)我们提供了用于LIDARTAG的物理设计的开放源代码实现,以及在C++和机器人操作系统(ROS)中使用的所有相关软件。
https://github.com/UMich-BipedLab/LiDARTag.git
主要内容
Tag设计与激光雷达特性
假设LiDARTag由刚性连接到3D对象的平面基准标记组成,如图3a所示。当激光雷达扫描时,标记显示不同的强度值,强度值取决于激光雷达如何测量物体的反射率,只要标记物是由不同的反射率组成,并且放置在图3b中以黄色突出显示的区域内,基于相机的系统的大多数类型的基准标记都可以适用于基于激光雷达的系统。图3c显示了用作LiDARTag的AprilTag示例。在本文的实验中,作者从普通打印机和海报印刷机上打印标记物,因此,具有两种颜色的标记,如AprilTag、ARTag、InterSense等可以最容易地适用于我们的LiDARTag系统。
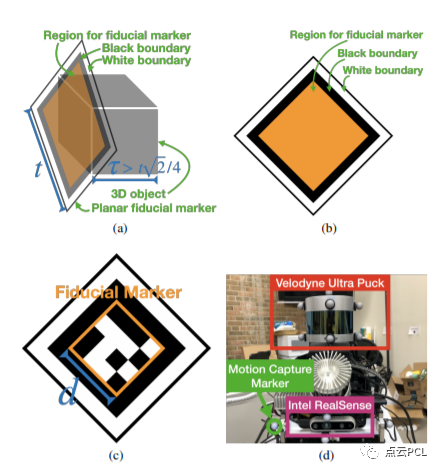
图3:(a)展示出了由两部分组成的LiDARTag:一个3D对象,带有一个刚性连接的平面基准标记,其中t和h分别是对象的标记大小和高度。(b) 显示标记物应放置在黄色区域内,(c)显示了AprilTag用作LiDARTag的示例。(d) 传感器配置是否由激光雷达、摄像机和多个运动捕捉标记组成
在这项初步研究中,我们使用AprilTag3作为我们的基准标记。此外,在AprilTag3标记物家族中,我们选择tag16h6c5,即编码16位(即16个黑色或白色方块)的标记,最小汉明距离为6,复杂度为5,汉明距离测量将一个比特串转换为另一个比特串所需的最小比特变化次数。AprilTag的复杂性定义为生成标签的二维模式所需的矩形数量,例如,实体图案只需要一个矩形,而黑白条纹则需要两个矩形(首先绘制一个大的白色矩形,然后绘制一个小的黑色矩形)。
TAG检测
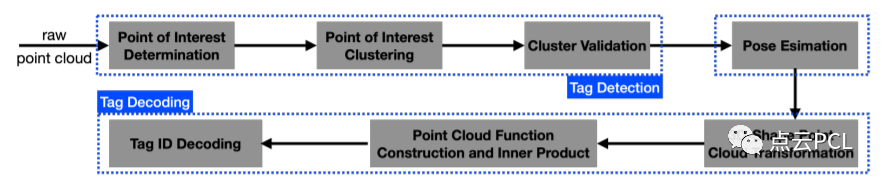
图4:系统包括三个部分:tag检测、姿势估计和Tag解码
整个Tag检测流程如图4所示,要定位点云中的潜在Lidartag,第一步是查找特征,然后将特征分组为不同的簇。这些集群中的大多数不包含标记,因此,必须验证集群是否包含LiDARTag。
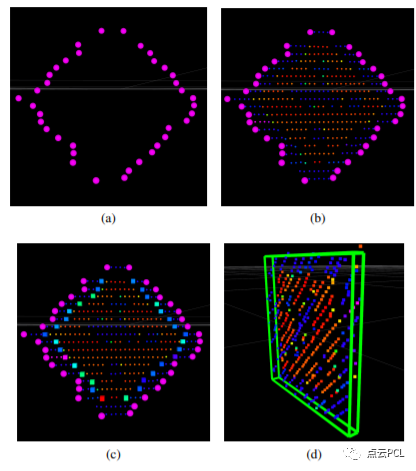
LiDARTag系统的检测的中间步骤,系统采用全扫描点云并应用定义的特征检测,并将特征关联到簇(洋红色球体),如(a)所示,使用这些特征,从原始扫描中填充簇(不同的颜色点代表不同的强度值),如(b)所示。然后,将检测边界点(用方框表示),验证所有簇后,(d)显示了激光雷达原点的激光雷达标签点云的结果,这是从标签到激光雷达的刚体变换,最大限度地减少了L1拟合误差,绿色框是基准标记的模板
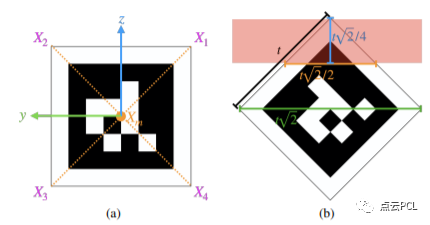
图7:(a)描述了基准标记物的坐标系,(b) 表示第一束射入到LiDARTag的光束应至少比目标高出3/4,轮廓为红色区域。
姿态估计和初始化
激光雷达的姿态定义为从激光雷达坐标系到LIDARTag的刚体变换,如图8所示,估计位姿又是一个优化问题,有兴趣的可以查看原文公式推导

图8:该概念图说明了估算LiDARTag姿势的方法
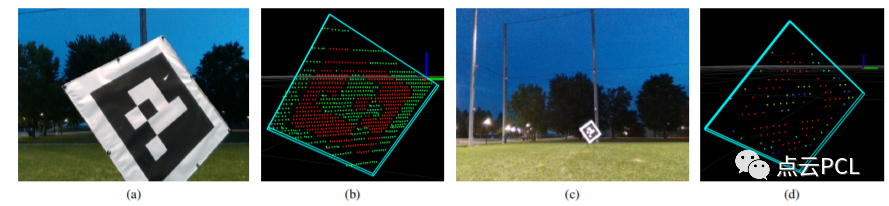
下图中(a)和(c)是放置在距离机器人2米和14米处的标签图像。(b) 和(d)描述了分别在2米和16米处通过LiDARTag的姿势将模板(绿色框)从激光雷达原点投影到标签返回的结果,虽然由于距离较远,(d)显示的激光雷达回波比(b)要稀疏得多,但我们仍然能够准确估计姿势及其ID,与30个运动捕捉相机提供的真值相比,产生的姿势平移几毫米,旋转几度。
实验
对所提出的LiDARTag进行了实验评估,在这项工作中,我们选择一个画架作为我们的3D对象来支持标签。此外,使用了AprilTag3的tag16h6家族的基准标记物,其尺寸为1.2、0.8、0.61米,我们没有的LiDARTag系统与基于摄像头的标签系统进行比较,因为将激光雷达的深度估计与单目摄像头的深度估计进行比较是不公平的。所有实验均使用32束Velodyne ULTRA Puck激光雷达和Intel RealSense相机进行,该相机刚性连接在两足机器人躯干上,并使用机器人操作系统(ROS)在传感器之间进行通信和同步。
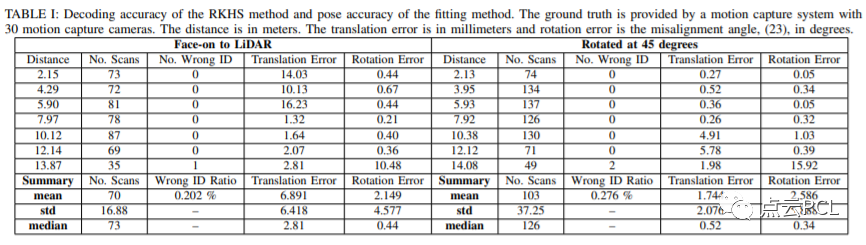
下表定量比较了LiDARTag和真值之间的姿态估计,平移误差以毫米为单位,旋转误差度为单位
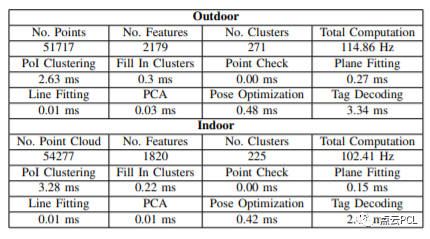
流程各步骤的计算时间和聚类分析如下表所示,在室内环境聚类较少,因为检测到的特征彼此更接近,导致许多特征聚集在一起,室外环境中的计算时间比室内环境中的计算时间要快,由于簇的稀疏性,会剔除更多的点云簇,在这两种环境中,系统都能实现实时性能。
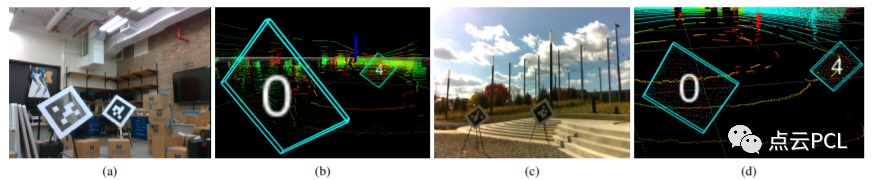
在室内和室外的检测如下图(a)和(c)将0.8米和0.6米的标记物放置在杂乱的室内实验室和宽敞的室外环境中,(b) 和(d)显示该算法成功地检测到由青色框指示的两个不同大小的标记,
总结
本文提出了一种新颖灵活的点云基准标记物系统,开发的基准标记物检测系统实时运行,同时可以处理使用32束Velodyne ULTRA Puck激光雷达对原始点云数据,该系统的每一步都在杂乱的室内和宽敞的室外环境中进行了广泛的分析和评估,此外,该系统可以在完全黑暗的环境中运行,LiDARTag的位姿估计平移精度达到了毫米,旋转误差也达到了几度。所提出的基准标记系统也可与摄像机一起使用,并已成功用于LiDAR和camera标定。
资源
三维点云论文及相关应用分享
【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法
3D-MiniNet: 从点云中学习2D表示以实现快速有效的3D LIDAR语义分割(2020)
PCL中outofcore模块---基于核外八叉树的大规模点云的显示
更多文章可查看:点云学习历史文章大汇总
SLAM及AR相关分享
扫描下方微信视频号二维码可查看最新研究成果及相关开源方案的演示:
如果你对本文感兴趣,请后台发送“知识星球”获取二维码,务必按照“姓名+学校/公司+研究方向”备注加入免费知识星球,免费下载pdf文档,和更多热爱分享的小伙伴一起交流吧!
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入免费星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
分享及合作方式:微信“920177957”(需要按要求备注) 联系邮箱:dianyunpcl@163.com,欢迎企业来联系公众号展开合作。
点一下“在看”你会更好看耶
















 1668
1668











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











