







evo主要有以下几种命令:
evo_ape : 计算绝对位姿误差
evo_rpe : 计算相对位姿误差
evo_traj : 轨迹管理的主要工具(常用来绘制轨迹)
evo_config : 全局设置和配置文件操作
evo_res : 结果比较
1. evo_ape
绝对位姿误差,常被用作绝对轨迹误差,比较估计轨迹和参考轨迹并计算整个轨迹的统计数据,适用于测试轨迹的全局一致性。
命令语法:命令 格式 参考轨迹 估计轨迹 [可选项]
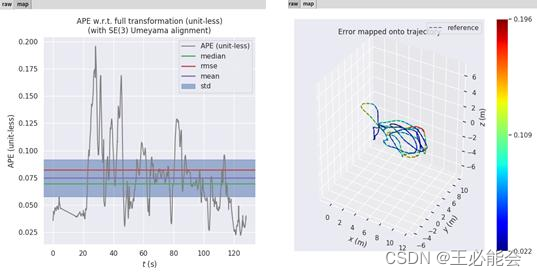
evo_ape euroc MH_data3.csv pose_graphloop.txt -r full -va --plot --plot_mode xyz --save_plot ./VINSplot --save_results ./VINS.zip
命令含义: 计算考虑平移和旋转部分误差的ape,进行平移和旋转对齐,以详细模式显示,保存画图并保存计算结果。运行结果如下:
其中,命令:就是上边介绍的五种:evo_ape 、evo_rpe 、evo_traj 、evo_config、evo_res
格式: 数据集的格式,有euroc、tum等
参考轨迹: 原有的、或者运行出来保存的.txt文件
【可选项】:
(1) -r 表示ape所基于的姿态关系
-r full 表示同时考虑旋转和平移误差得到的ape,无单位(unit-less)
-r trans_part 考虑平移部分得到的ape,单位为m (如果-r后边什么也不加,则默认为这一项)
-r rot_part 考虑旋转部分得到的ape,无单位(unit-less)
-r angle_deg 考虑旋转角得到的ape,单位°(deg)
-r angle_rad 考虑旋转角得到的ape,单位弧度(rad)
(2)-v表示verbose mode,详细模式
-a表示采用SE(3) Umeyama对齐
-s表示尺度对其
三者可以单独使用也可以结合使用
(3)-plot表示画图 可以简写为 -p 格式: -p --plot_mode xy
–plot_mode选择画图模式,二维图或者三维图,可选参数为[xy, xz, yx, yz, zx, zy, xyz],默认为xyz。保存画图结果可以自己手动在窗体上保存,也可以通过–save_plot实现,–save_plot后接保存路径,如./VINSplot, 表示存储在当前路径下的名称为VINSplot的文件中,保存文件的类型可以通过evo_config设置。
(4)– save_results表示存储结果
后面跟随存储路径以及压缩文件名称,存储后得到zip压缩文件。
evo安装包中自带的程序示例:
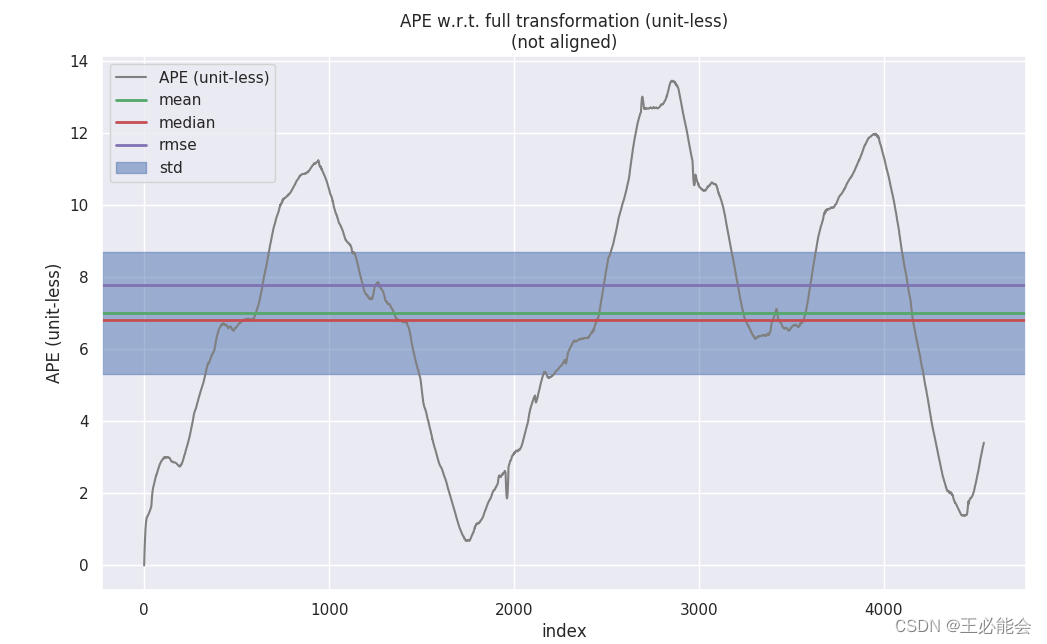
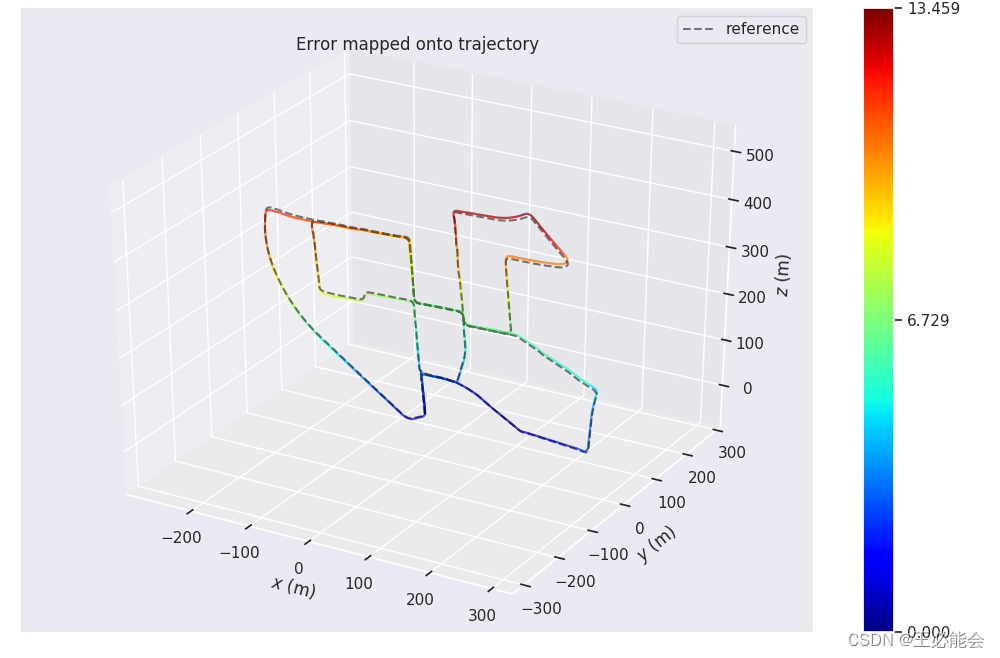
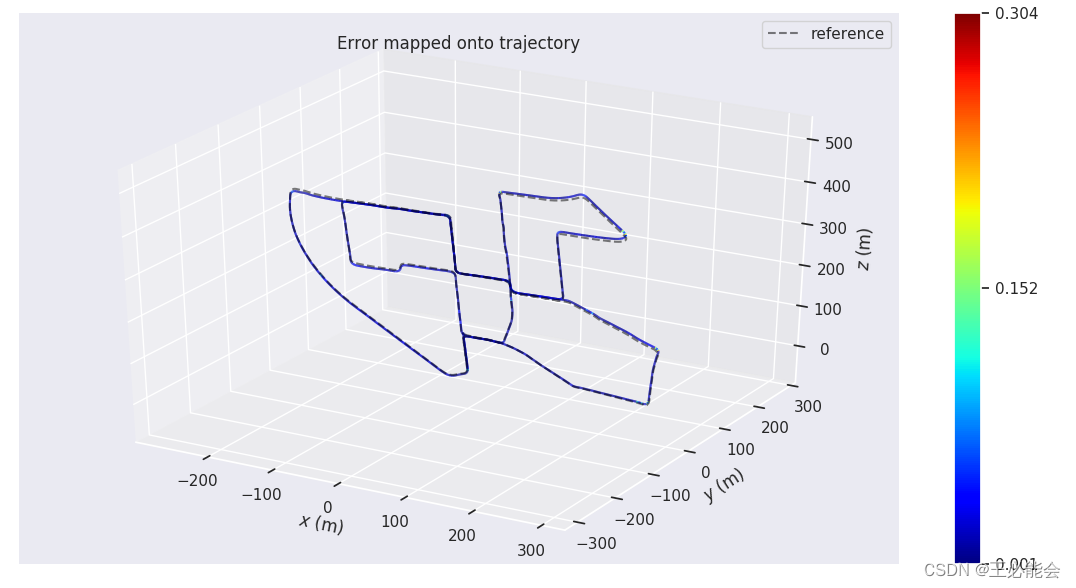
evo_ape kitti KITTI_00_gt.txt KITTI_00_ORB.txt -r full --plot --plot_mode xyz效果图:
2. evo_rpe
相对位姿误差不进行绝对位姿的比较,相对位姿误差比较运动(姿态增量)。相对位姿误差可以给出局部精度,例如slam系统每米的平移或者旋转漂移量。
命令语法同上:命令 格式 参考轨迹 估计轨迹 [可选项]
evo安装包中自带的程序示例:
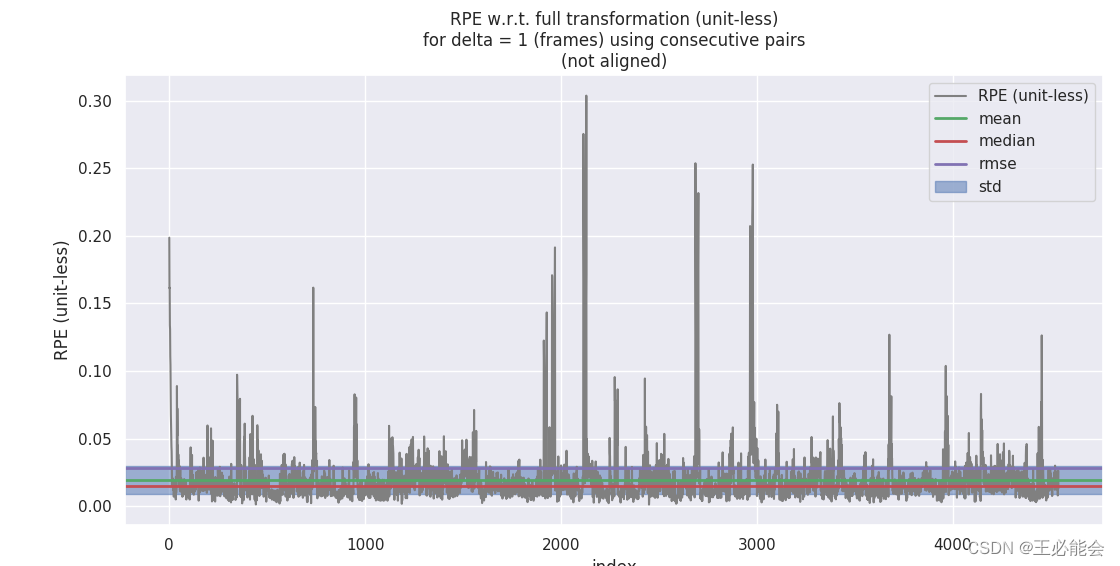
evo_rpe kitti KITTI_00_gt.txt KITTI_00_ORB.txt -r full --plot --plot_mode xyz效果:
3. evo-traj
evo_traj可以打开任意多个轨迹,查看统计信息。-v表示以详细模式显示,–full_check可以对轨迹进行检查。
示例:选择了三个轨迹
evo_traj kitti KITTI_00_gt.txt KITTI_00_ORB.txt KITTI_00_SPTAM.txt -v --full_check -p
效果图省略。
4. evo_config
(1)evo_config show可以查看设置文件中的参数和参数的简要注释。
(2)evo_config set 进行参数设置
常用参数如下表:
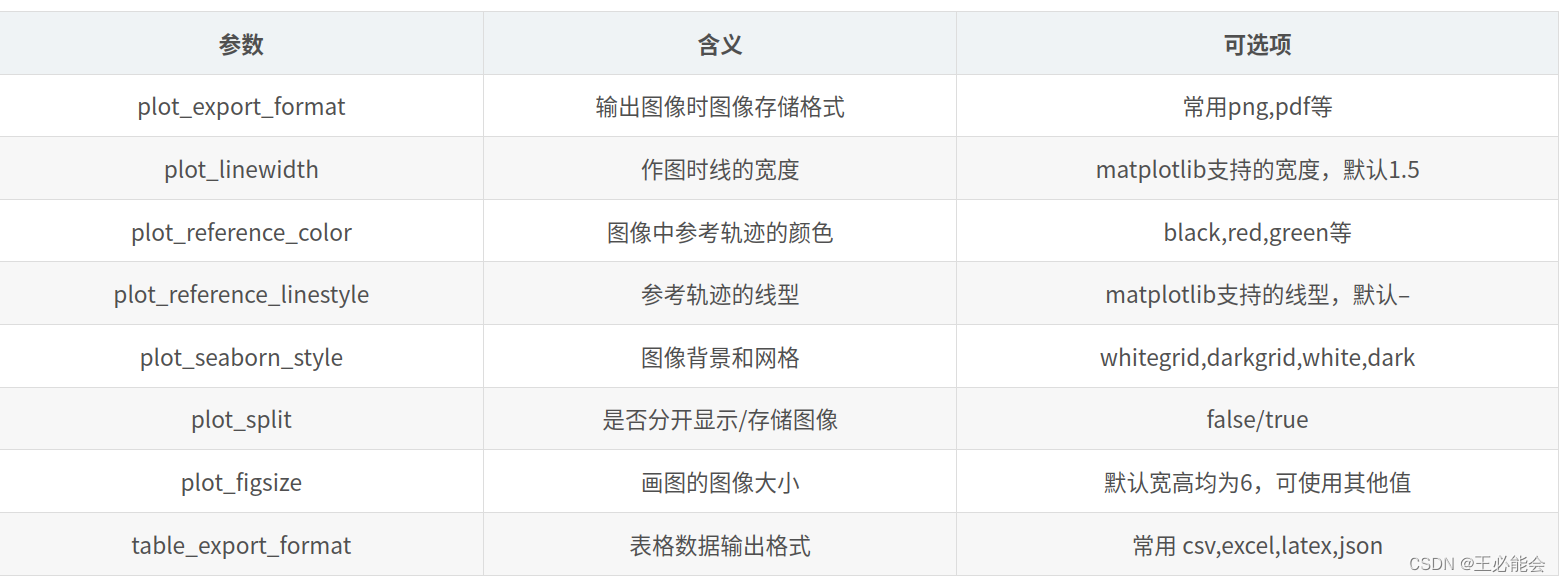
命令使用举例:
evo_config set plot_seaborn_style whitegrid #将画图背景更改成白色网格
evo_config set plot_fontfamily serif plot_fontscale 1.2 #将字体改为衬线型并调为1.2倍大小
evo_config set plot_reference_linestyle - #将画图所使用的线型改为 -
evo_config set plot_figsize 10 9 #将所画图的图像大小调整为10 9(宽 高)
evo_config reset #将参数还原到默认值
5. evo_res
evo_ape/evo_rpe中将结果保存为.zip文件后,可以利用evo_res对不同的结果进行比较。
例如:
evo_res mySLAM.zip ORB-SLAM2.zip参考来源:
1. https://github.com/MichaelGrupp/evo/wiki

















 9247
9247

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









