







直接编译:
- 在工作空间输入
catkin_make进行编译 - 另开终端,开启ros
roscore
- 另开终端,进入工作空间,运行euroc数据集的启动节点
source devel/setup.bash
roslaunch vins_estimator euroc.launch
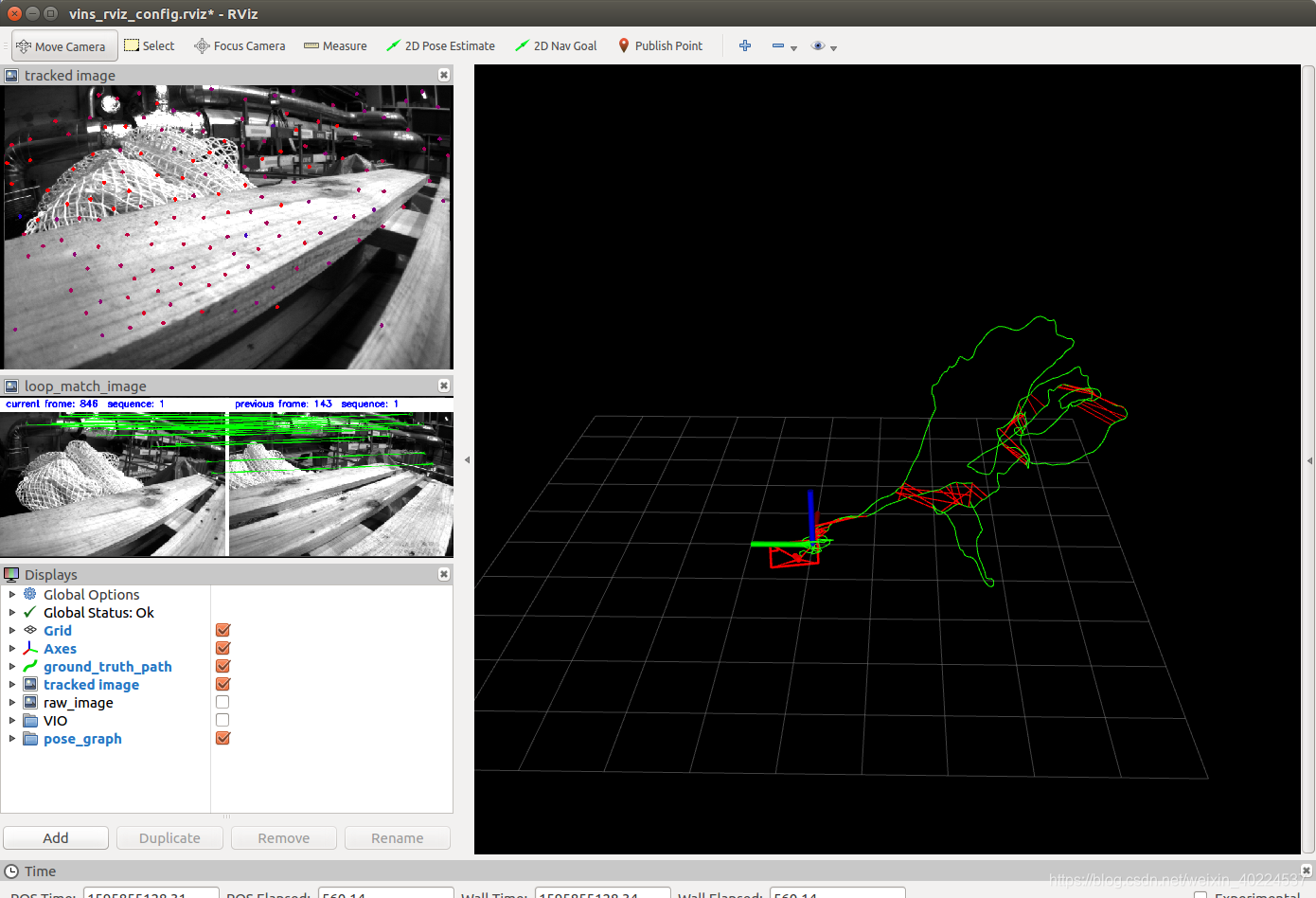
- 另开终端,进入工作空间,键入以下命令,开启rviz
source devel/setup.bash
roslaunch vins_estimator vins_rviz.launch
- 另开终端,进入工作空间,键入以下命令,加载数据集
source devel/setup.bash
rosbag play /home/ouc/dataset/EUROC/MH_04_difficult.bag
实验结果
使用evo测评工具进行测评:
参考博客-----指路
这里我用的是MH_01_easy.bag数据集,嗯。。。。。。。。。。
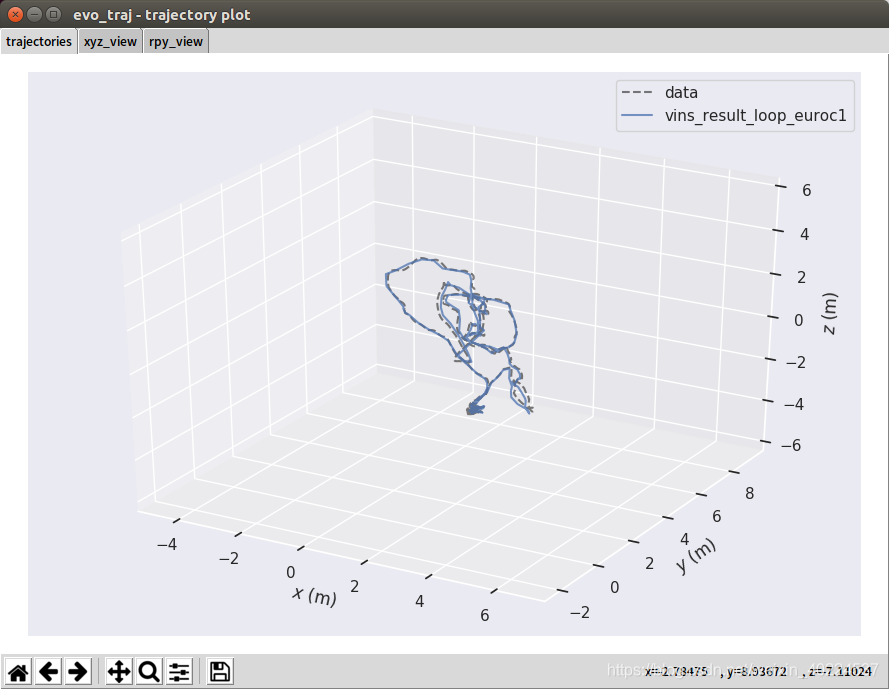
1. 带有回环的vins_mono与ground_truth的轨迹比对
修改代码后,打开数据集的state_groundtruth_estimate0,找到文件data.csv。这是一个euroc格式的文件,把他转成tum格式。输入以下命令:
evo_traj euroc data.csv --save_as_tum
绘制轨迹,在当前路径下输入:
evo_traj tum /home/ouc/output/vins_mono/EUROC/vins_result_loop_euroc1.txt --ref=data.tum -p --plot_mode=xyz --align --correct_scale
输出结果:

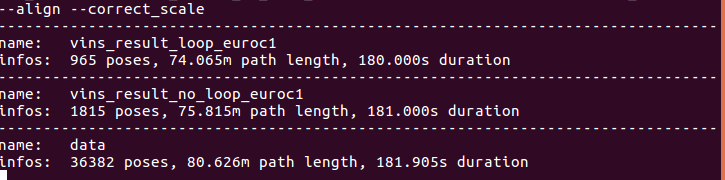
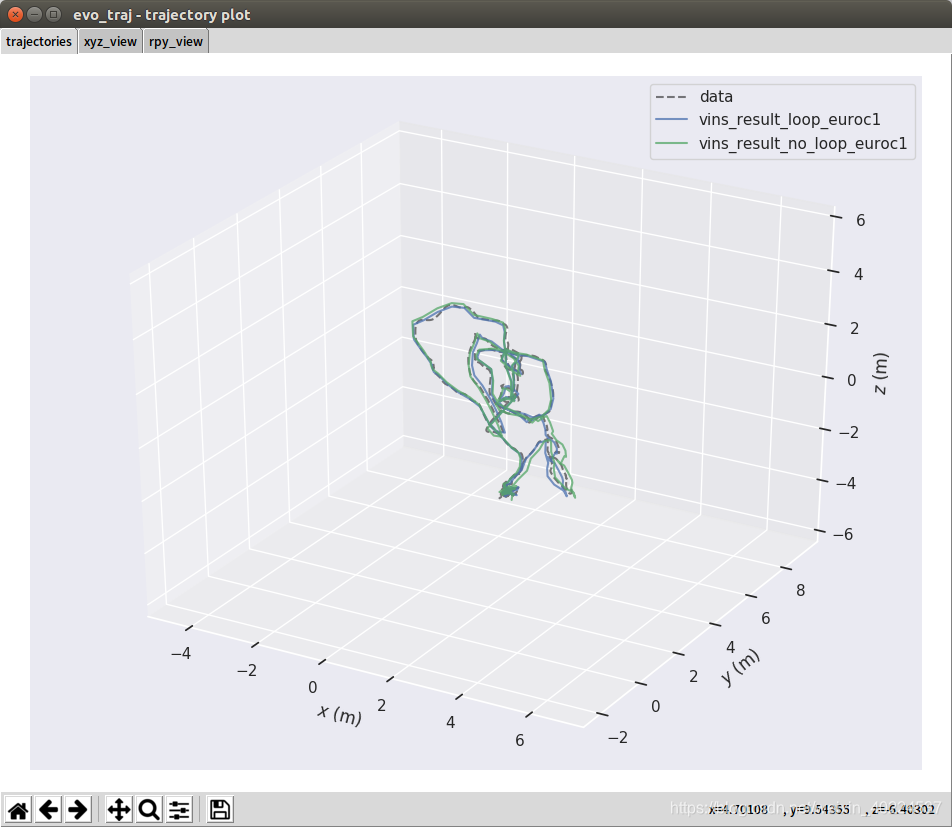
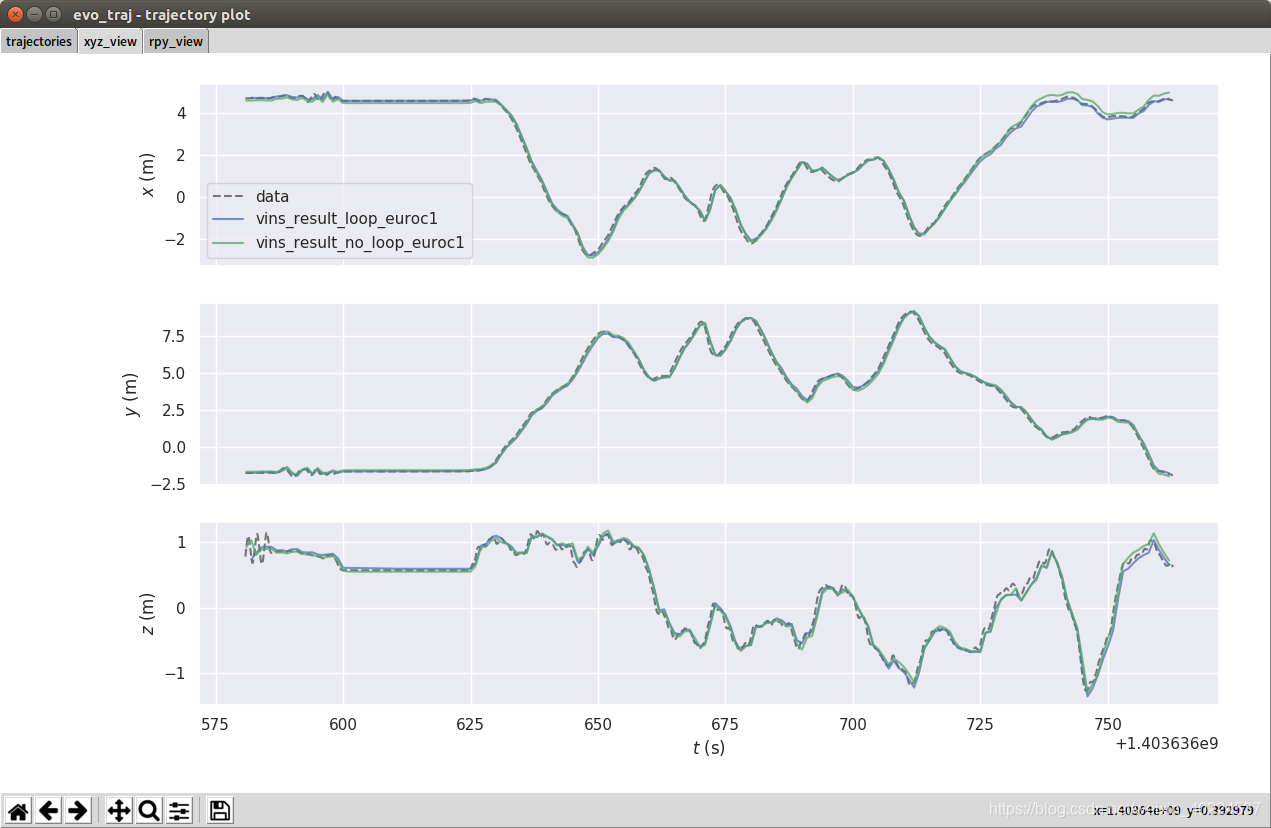
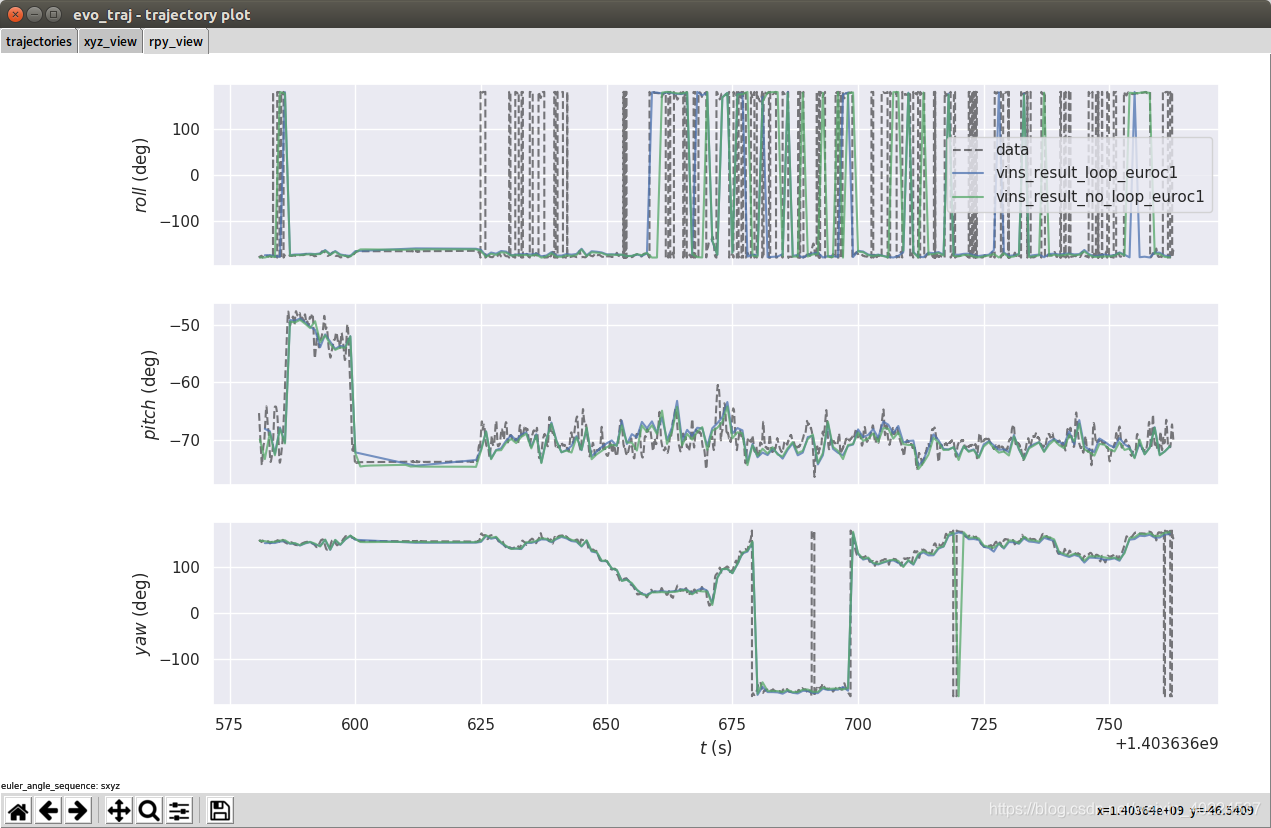
 2. 回环&没有回环的vins_mono与ground_truth的轨迹比对
2. 回环&没有回环的vins_mono与ground_truth的轨迹比对
evo_traj t /home/ouc/output/vins_mono/EUROC/vins_result_loop_euroc1.txt /home/ouc/output/vins_mono/EUROC/vins_result_no_loop_euroc1.txt --ref=data.tum -p --plot_mode=xyz --align --correct_scale















 545
545











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









