






汽车底盘的运动学模型分为两类:
- 以后轴为中心的车辆运动学模型
- 以质心为中心的车辆运动学模型
本文主要介绍以后轴为中心的车辆运动学模型。即将机体坐标系原点设置在后轴中心,假设只存在前轮偏角,推导以后轴为原点的运动学模型。
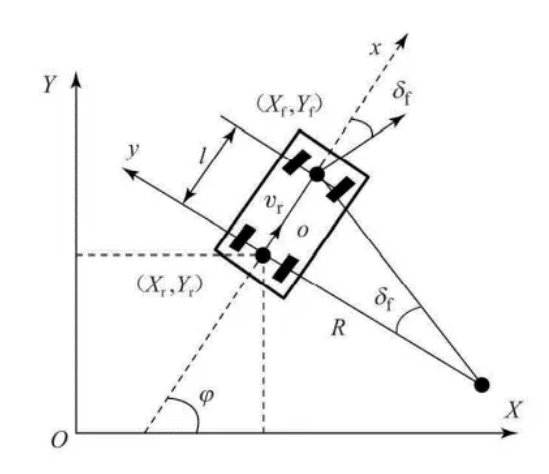
如图,
- XY坐标系为惯性坐标系, X 轴正向为东,Y 轴正向为北;
- xy坐标系为车体坐标系, x 轴正向为车辆前方、y 轴正向为车辆左侧;
- 在惯性坐标系 XOY 下,后轴中心为 ( X r , Y r ) (X_r, Y_r) (Xr,Yr),前轴中心为 ( X f , Y f ) (X_f, Y_f) (Xf,Yf)
- 横摆角或航向角 φ \varphi φ(车体坐标系 x 轴与惯性坐标系 X 轴之间的夹角,正向为逆时针方向)
- 前轮转角 δ f \delta_f δf(正向为逆时针方向)
- 后轴中心的速度 v r v_r vr
- 后轴中心的速度 v f v_f vf
- 后轴中心的瞬时转向半径 R R R
- 轴距
下面开始推导运动学模型:
首先,后轴中心
(
X
r
,
Y
r
)
(X_r, Y_r)
(Xr,Yr) 处的速度:
v
r
=
X
˙
r
cos
φ
+
Y
˙
r
sin
φ
(1)
v_r=\dot{X}_r \cos \varphi+\dot{Y}_r \sin \varphi \tag{1}
vr=X˙rcosφ+Y˙rsinφ(1)
前、后轴中心的运动学约束(假设没有横向滑移):
{
X
˙
f
sin
(
φ
+
δ
f
)
=
Y
˙
f
cos
(
φ
+
δ
f
)
X
˙
r
sin
φ
=
Y
˙
r
cos
φ
(2)
\left\{\begin{array}{l} \dot{X}_{\mathrm{f}} \sin \left(\varphi+\delta_{\mathrm{f}}\right)=\dot{Y}_{\mathrm{f}} \cos \left(\varphi+\delta_{\mathrm{f}}\right) \\ \dot{X}_{\mathrm{r}} \sin \varphi=\dot{Y}_{\mathrm{r}} \cos \varphi \end{array}\right. \tag{2}
{X˙fsin(φ+δf)=Y˙fcos(φ+δf)X˙rsinφ=Y˙rcosφ(2)
由公式(1),可以得到下面两个式子:
v
r
cos
φ
=
X
˙
r
cos
2
φ
+
Y
˙
r
sin
φ
cos
φ
v
r
sin
φ
=
X
˙
r
cos
φ
sin
φ
+
Y
˙
r
sin
2
φ
(3)
v_r \cos \varphi=\dot{X}_r \cos^2 \varphi +\dot{Y}_r \sin \varphi\cos \varphi\\ v_r \sin\varphi=\dot{X}_r \cos \varphi \sin\varphi+\dot{Y}_r \sin^2 \varphi \tag{3}
vrcosφ=X˙rcos2φ+Y˙rsinφcosφvrsinφ=X˙rcosφsinφ+Y˙rsin2φ(3)
将(2)中的:
X
˙
r
sin
φ
=
Y
˙
r
cos
φ
\dot{X}_{\mathrm{r}} \sin \varphi=\dot{Y}_{\mathrm{r}} \cos \varphi
X˙rsinφ=Y˙rcosφ,代入(3)得到后轴中心的速度分量
{
V
r
x
=
X
˙
r
=
v
r
cos
φ
V
r
y
=
Y
˙
r
=
v
r
sin
φ
(4)
\left\{\begin{array}{l} V_{rx}=\dot{X}_r=v_{\mathrm{r}} \cos \varphi \\ V_{ry}=\dot{Y}_{\mathrm{r}}=v_{\mathrm{r}} \sin \varphi \end{array}\right.\tag{4}
{Vrx=X˙r=vrcosφVry=Y˙r=vrsinφ(4)
另外,前、后轴中心之间的几何关系:
{
X
f
=
X
r
+
l
cos
φ
Y
f
=
Y
r
+
l
sin
φ
.
(5)
\left\{\begin{array}{l} X_{\mathrm{f}}=X_{\mathrm{r}}+l \cos \varphi \\ Y_{\mathrm{f}}=Y_{\mathrm{r}}+l \sin \varphi \end{array}\right. .\tag{5}
{Xf=Xr+lcosφYf=Yr+lsinφ.(5)
对(5)求导得到:
{
X
˙
f
=
X
˙
r
−
l
sin
φ
Y
˙
f
=
Y
˙
r
+
l
cos
φ
.
(6)
\left\{\begin{array}{l} \dot X_{\mathrm{f}}=\dot X_{\mathrm{r}}-l \sin\varphi \\ \dot Y_{\mathrm{f}}=\dot Y_{\mathrm{r}}+l \cos \varphi \end{array}\right. .\tag{6}
{X˙f=X˙r−lsinφY˙f=Y˙r+lcosφ.(6)
将式 (6) 代入式 (2),解得横摆角速度(对sin(a+b),cos(a+b)展开),最后化简得横摆角速度
φ
˙
=
ω
=
v
r
l
tan
δ
f
(7)
\dot{ \varphi }=\omega=\frac{v_{\mathrm{r}}}{l} \tan \delta_{\mathrm{f}} \tag{7}
φ˙=ω=lvrtanδf(7)
由横摆角速度
ω
\omega
ω 和后轴中心速度
v
r
v_r
vr ,得后轮的转向半径
R
R
R 和前轮转角
δ
f
\delta_{\mathrm{f}}
δf
{
R
=
v
r
/
ω
δ
f
=
arctan
(
l
/
R
)
(8)
\left\{\begin{array}{l} R=v_{\mathrm{r}} / \omega \\ \delta_{\mathrm{f}}=\arctan (l / R) \end{array}\right. \tag{8}
{R=vr/ωδf=arctan(l/R)(8)
由(4)和(7)得到运动学模型:
{
X
˙
r
=
v
r
cos
φ
Y
˙
r
=
v
r
sin
φ
φ
˙
=
ω
=
v
r
l
tan
δ
f
(9)
\left\{\begin{array}{l} \dot{X}_r=v_{\mathrm{r}} \cos \varphi \\ \dot{Y}_{\mathrm{r}}=v_{\mathrm{r}} \sin \varphi \\ \dot{ \varphi }=\omega=\frac{v_{\mathrm{r}}}{l} \tan \delta_{\mathrm{f}} \end{array}\right.\tag{9}
⎩
⎨
⎧X˙r=vrcosφY˙r=vrsinφφ˙=ω=lvrtanδf(9)
写成矩阵形式:
[
X
˙
r
Y
˙
r
φ
˙
]
=
[
cos
φ
sin
φ
tan
δ
r
/
l
]
v
r
\left[\begin{array}{c} \dot{X}_{\mathrm{r}} \\ \dot{Y}_{\mathrm{r}} \\ \dot{\varphi} \end{array}\right]=\left[\begin{array}{c} \cos \varphi \\ \sin \varphi \\ \tan \delta_{\mathrm{r}} / l \end{array}\right] v_{\mathrm{r}}
X˙rY˙rφ˙
=
cosφsinφtanδr/l
vr
[
X
˙
r
Y
˙
r
φ
˙
]
=
[
cos
φ
0
sin
φ
0
0
1
]
[
v
φ
]
\left[\begin{array}{c} \dot{X}_{\mathrm{r}} \\ \dot{Y}_{\mathrm{r}} \\ \dot{\varphi} \end{array}\right]= \begin{bmatrix} \cos \varphi & 0\\ \sin\varphi & 0 \\ 0 & 1 \end{bmatrix} \begin{bmatrix} v\\ \varphi \\ \end{bmatrix}
X˙rY˙rφ˙
=
cosφsinφ0001
[vφ]

















 776
776

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









