






具身智能今年是越来越火了,李飞飞团队的成果一个接一个,上回还是荣获CoRL-LEAP研讨会最佳论文奖的ReKep,这个月月初又发布了𝗕𝗥𝗦,一个解决机器人在家庭任务中全身操作问题的综合框架,500美元就能让机器人帮你干一切家务!
另外还有许多成果成功登上各大顶会,足见具身智能学术关注度之高!加上之前看过的麦肯锡预测,到了2030年,全球具身智能市场规模可能达到数十万亿元,产业应用潜力巨大!入局不亏。
那么问题来了,未来我们该向何处发力?鉴于具身智能泛化性等核心问题尚未解决,建议考虑跨学科融合、底层技术革新等方向。我还整理了10篇具身智能2025新论文(附代码),又打包了20篇相关顶会论文和40+数据集,方便需要参考的科研er了解前沿,加快进度。
全部论文+开源代码需要的同学看文末
BEHAVIOR Robot Suite: Streamlining Real-World Whole-Body Manipulation for Everyday Household Activities
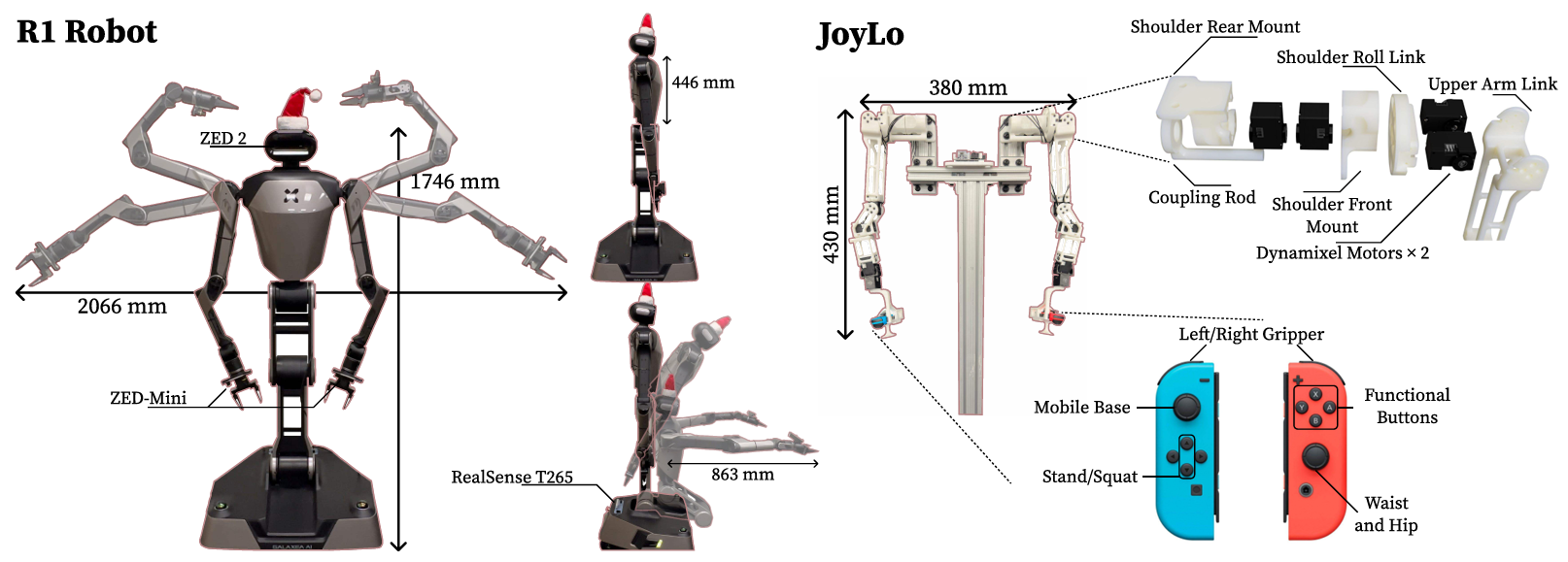
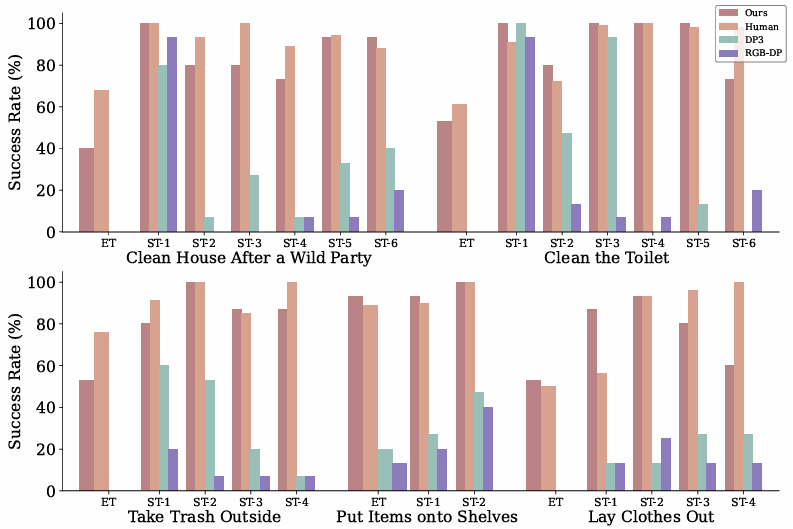
方法:论文提出了一个名为BRS的框架,用于机器人在家庭环境中完成全身操作任务。它通过具身智能的方法,结合低成本遥操作接口JoyLo和全身视动模仿学习算法WB-VIMA,利用机器人的身体结构和与环境的交互能力,高效采集数据并精准建模,从而提升机器人在复杂家庭环境中的操作性能。
创新点:
-
提出了一种低成本、通用的全身遥操作接口 JoyLo,用于数据采集。
-
开发了一种新颖的算法 WB-VIMA,用于学习协调的全身控制策略,特别适用于多关节机器人(如双足或双臂机器人)。
-
基于 BEHAVIOR-1K 基准,明确提出三大关键能力:双臂协调、稳定精准导航及广泛末端执行器可达性,并通过硬件设计实现支持。
ReKep: Spatio-Temporal Reasoning of Relational Keypoint Constraints for Robotic Manipulation
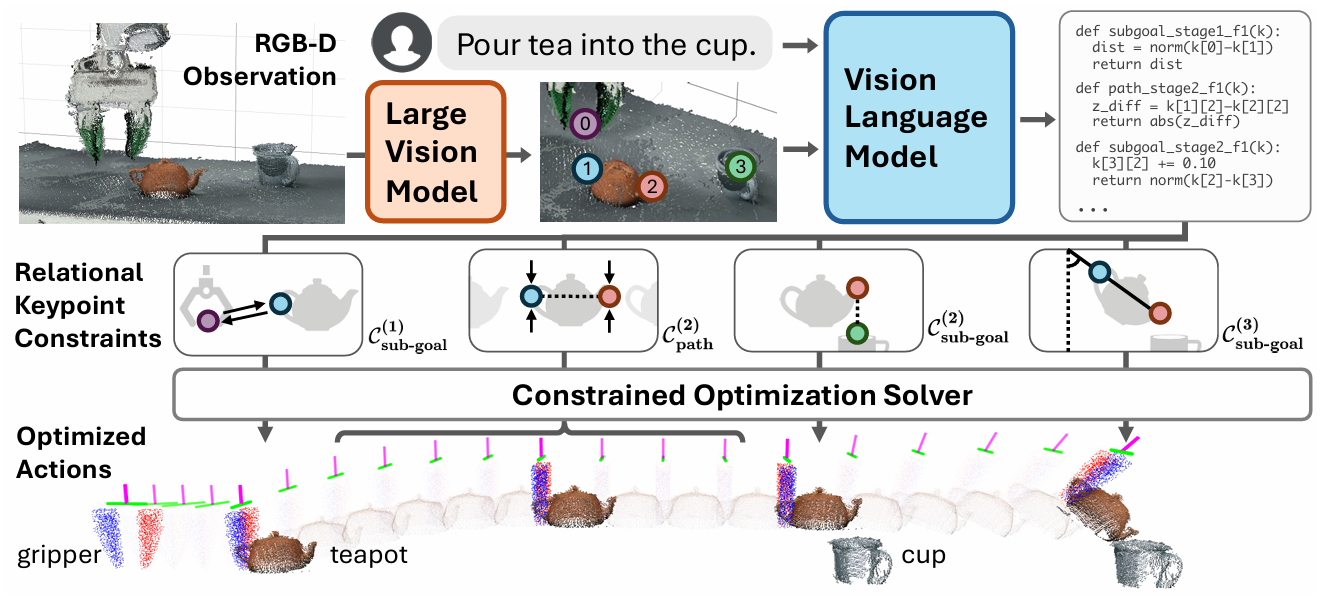
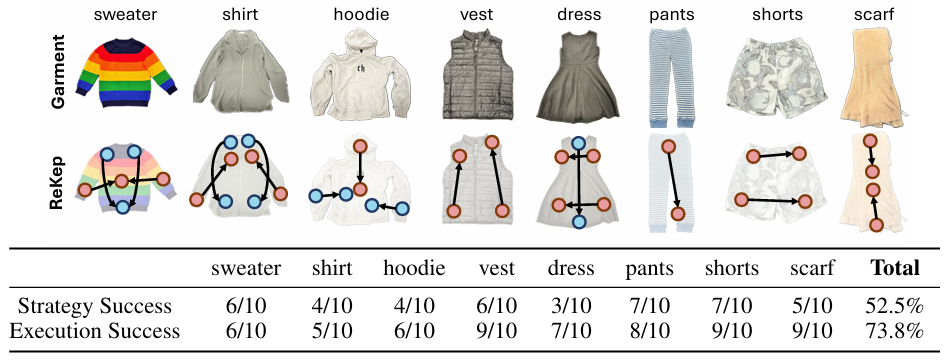
方法:论文提出了一种名为ReKep的方法,用于机器人操作任务。它通过定义关键点之间的关系来生成操作约束,并利用视觉模型和视觉语言模型自动生成这些约束。该方法结合实时感知和优化求解,实现了机器人在复杂环境中的多阶段、双臂协作和反应性操作,展示了具身智能在多样化任务中的高效性和灵活性。
创新点:
-
提出一种基于语义关键点(ReKep)的结构化约束表示方法,将场景中的关键点映射到数值成本函数,自动编码机器人与环境之间的关系。
-
构建了一个分层优化框架,用于实时解决机器人动作(即6-DoF或12-DoF末端执行器轨迹)。
-
开创性地利用视觉提示生成代码,其中代码包含关键点之间的任意算术关系,能够灵活指定复杂几何结构。
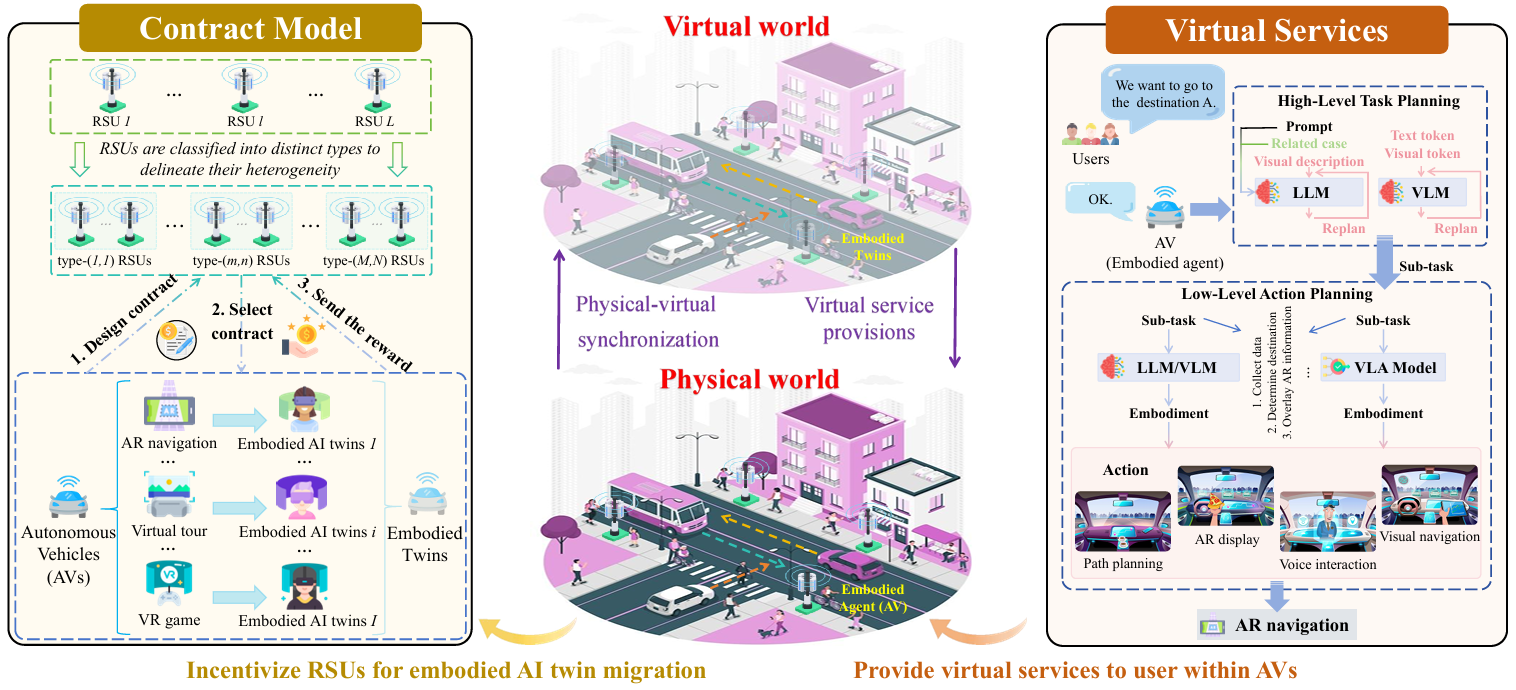
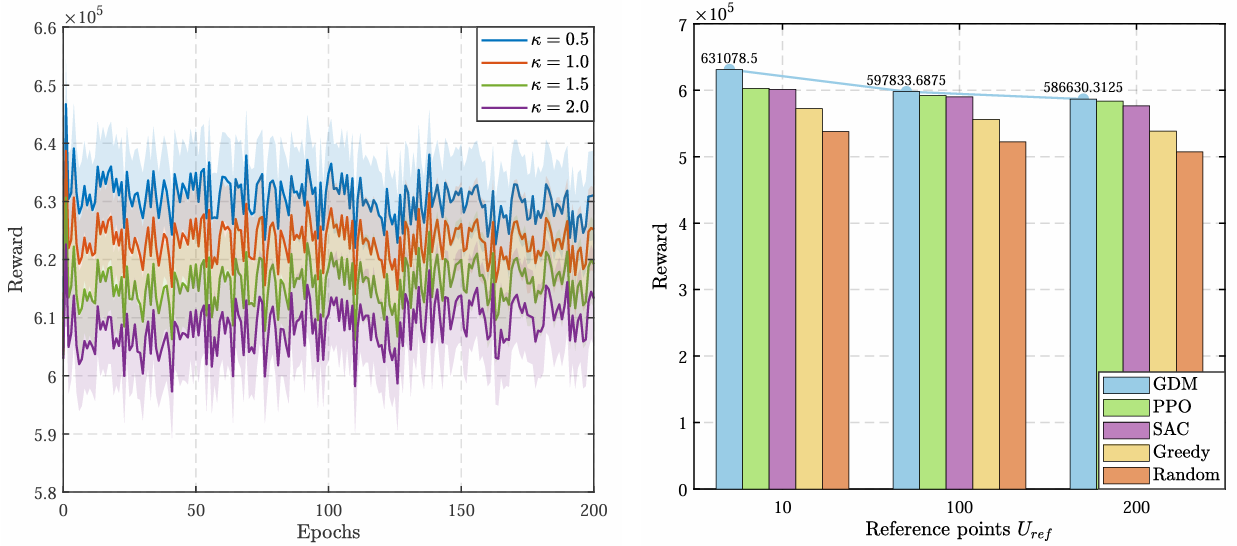
Generative Diffusion-Based Contract Design for Efficient AI Twin Migration in Vehicular Embodied AI Networks
方法:论文提出了一种基于生成扩散模型的合同设计方法,用于优化具身智能网络中具身智能双胞胎的迁移效率。通过结合前景理论来模拟自动驾驶车辆在不确定环境下的行为偏好,并利用GDM算法优化合同设计,提高具身智能双胞胎在路边单元之间的迁移效率。
创新点:
-
首次定义了具身智能代理的数字模型及其AI组件,用于在虚拟环境中执行任务以支持自动驾驶车辆中的智能应用。
-
设计了一个多维合同模型,并引入前景理论来更准确地衡量自动驾驶车辆在不确定环境下的主观效用。
-
采用生成扩散模型算法来优化合同设计,有效解决了高维度和复杂性问题。
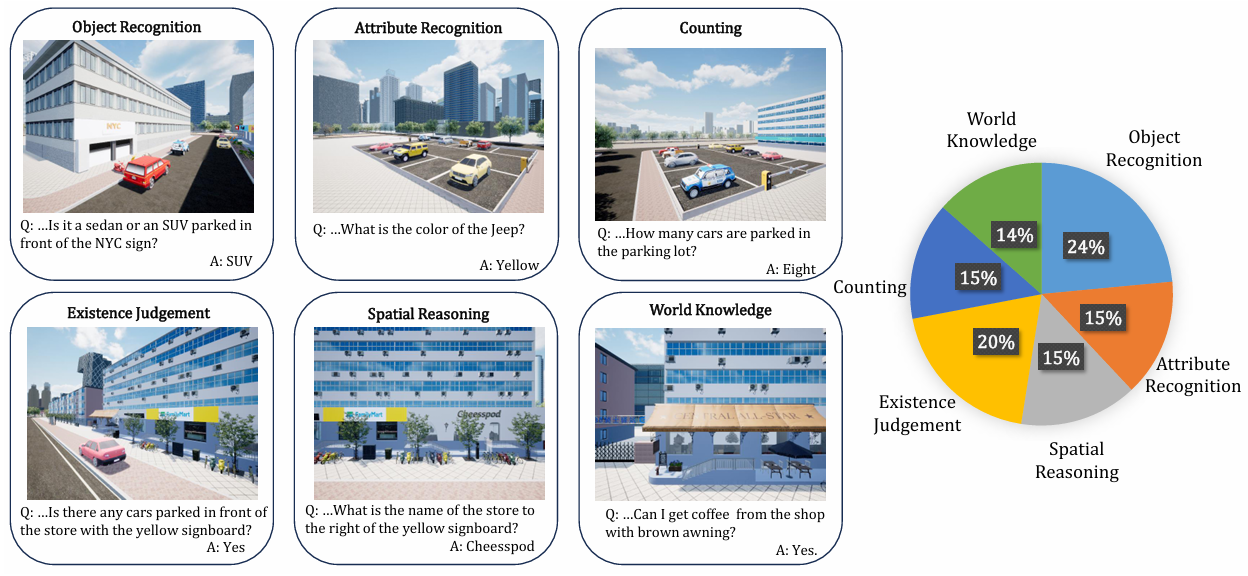
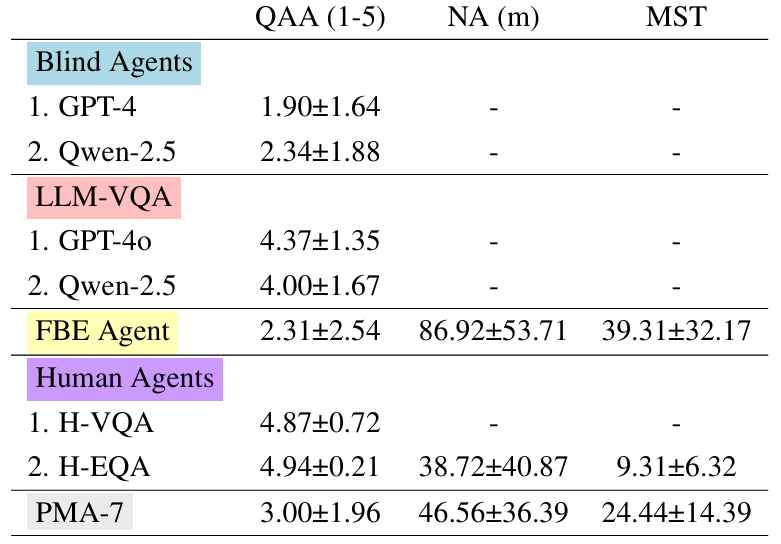
CityEQA: A Hierarchical LLM Agent on Embodied Question Answering Benchmark in City Space
方法:论文提出CityEQA,一个在城市空间中通过具身智能代理主动探索回答问题的新任务,并构建了CityEQA-EC数据集。同时,设计了PMA代理模型,通过分层规划、管理和执行任务,实现了60.7%的人类水平回答准确率,显著优于传统方法。
创新点:
-
提出 CityEQA-EC,这是首个针对城市空间的开放式问题回答基准数据集,包含1,412个人工标注的任务,涵盖六种任务类别。
-
开发了创新的PMA模型,通过分层规划和模块化执行有效解决了城市EQA任务的复杂性。
-
在探索与信息收集模块中首次引入MM-LLM,以增强视觉分析和开放式回答能力。
关注下方《学姐带你玩AI》🚀🚀🚀
回复“222”获取全部方案+开源代码
码字不易,欢迎大家点赞评论收藏

















 2123
2123

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









