







参考:
[1] 一定能解决ROS系统 rosdep update超时问题de简单方法
[2] 解决rosdep init和rosdep update根本问题
不同于[1],[2] 里面
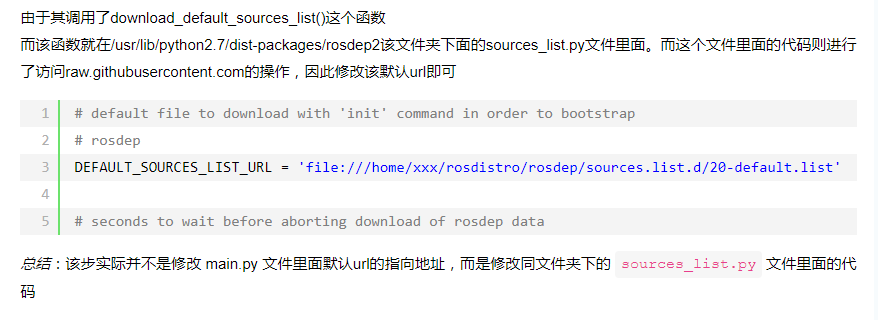
/usr/lib/python2.7/dist-packages/rosdep2该文件夹下面的sources_list.py文件同样需要修改!
另附
开启终端1输入
source activate py27
cd catkin_ws/
source devel/setup.bash
roslaunch uuv_gazebo_worlds ocean_waves.launch
开启终端2输入
source activate py27
cd catkin_ws/
source devel/setup.bash
roslaunch eca_a9_gazebo start_demo_teleop.launch joy_id:=0















 162
162











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









