






 本文介绍了如何通过在Pixhawk的SD卡中添加配置文件来提升MAVROS获取的IMU数据频率。默认情况下,MAVROS的IMU输出频率较低,但VIO应用通常需要高于100Hz的数据。通过在extras.txt文件中添加特定指令,可以将Pixhawk的USB口输出的IMU和姿态数据流频率设置为100Hz,以满足高速视觉定位的需求。
本文介绍了如何通过在Pixhawk的SD卡中添加配置文件来提升MAVROS获取的IMU数据频率。默认情况下,MAVROS的IMU输出频率较低,但VIO应用通常需要高于100Hz的数据。通过在extras.txt文件中添加特定指令,可以将Pixhawk的USB口输出的IMU和姿态数据流频率设置为100Hz,以满足高速视觉定位的需求。
提高MAVROS的IMU发布频率
Pixhawk的IMU数据可通过MAVROS获得,相关的话题为:
/mavros/imu/data
但是MAVROS默认的IMU输出频率较低,可能只有不到10Hz,而VIO一般需要100Hz以上的IMU数据。此时需要通过mavlink指令设置一些参数来提高MAVROS中IMU数据的频率。具体方法如下:
在Pixhawk的SD卡中添加文件/etc/extras.txt,文件中添加指令:
mavlink stream -d /dev/ttyACM0 -s ATTITUDE -r 100
mavlink stream -d /dev/ttyACM0 -s ATTITUDE_QUATERNION -r 100
mavlink stream -d /dev/ttyACM0 -s HIGHERS_IMU -r 100
其中/dev/ttyACM0表示Pixhawk与机载计算机连接的端口,ttyACM0表示用的是USB口。这几条指令分别表示将Pixhawk的USB口输出的姿态和IMU数据流的频率设置为100Hz,其中Pixhawk内置的IMU最高频率为200Hz,因此最高可设置输出200Hz的IMU数据。
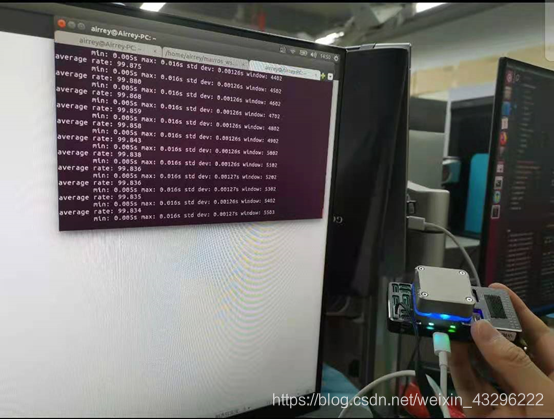
实际输出频率如下:
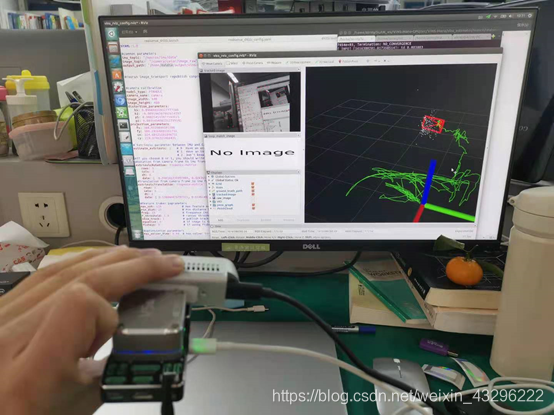
Pixhawk IMU + D435i image运行VINS-Mono

















 2754
2754

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









