







 本文详细阐述了机器人自由度的概念,包括其分类、对机器人性能的影响以及关键参数如关节类型、机械结构和控制系统的作用。还探讨了自由度控制涉及的硬件如传感器、执行器和控制器,以及软件和算法的重要性。
本文详细阐述了机器人自由度的概念,包括其分类、对机器人性能的影响以及关键参数如关节类型、机械结构和控制系统的作用。还探讨了自由度控制涉及的硬件如传感器、执行器和控制器,以及软件和算法的重要性。
目录
机器人的自由度是指机器人在空间中可以独立移动的方向和角度的数量,它是衡量机器人灵活性和功能性的一个重要指标。自由度的高低直接影响机器人能够执行的任务类型和复杂程度。
自由度的定义
机器人的自由度是指描述机器人末端执行器(例如机械手臂的末端或机器人的脚)能够自由变化的轴数或方向的数量。这些参数通常包括平移和旋转动作。
自由度的分类
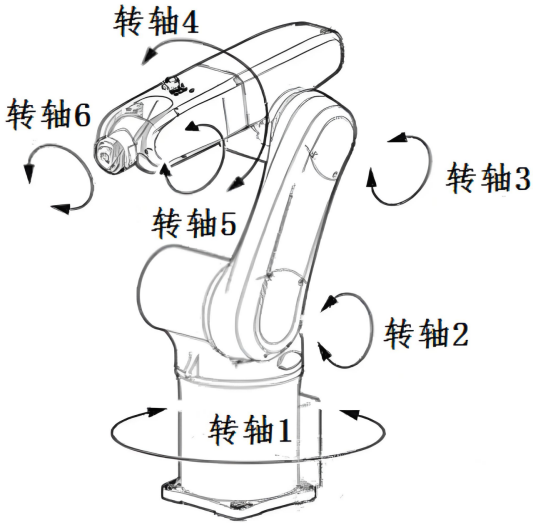
转动自由度:机器人关节的旋转能力,如手臂的旋转。
平移自由度:机器人或其部件沿直线路径移动的能力,如汽车的行驶。
复合自由度:结合转动和平移的能力,如机械手臂在空间中的移动。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











