










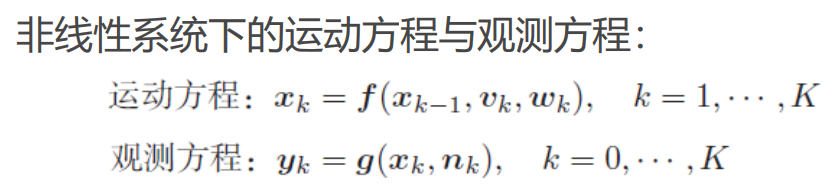
本章讲解非线性非高斯状态下的状态估计问题。重点讲解非线性非高斯的状态转移、离散时间的递归估计和离散时间的批量估计三部分。
非线性系统的贝叶斯推断
举例:从双目视差推断深度距离。





Matlab蒙特卡洛仿真程序
离散时间的递归估计(滤波估计)

扩展卡尔曼滤波(Extended Kalman Filter)
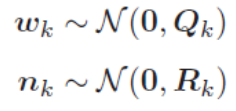
在贝叶斯滤波的基础上,假设噪声符合高斯分布,亦即:
将观测方程和运动方程进行线性化:

经过一系列推导,可得EKF的经典公式:

迭代EKF
在EKF的基础上,每次估计后得到新的估计值,在新估计值处对观测方程重新进行线性化,再进行EKF。


EKF、 IEKF、 MAP之间的关系

其他处理非线性变换的方法及滤波
处理非线性变换的其他方法还有:蒙特卡罗法、 sigma point变换法等。

分别利用蒙塔卡罗法和sigma point变换法处理非线性问题,可得到粒子滤波和无迹卡尔曼滤波。
粒子滤波

无迹卡尔曼滤波



滤波方法之间的关系

离散时间的批量估计(优化估计)

求解方法:Gauss-Newton法与Levernberg-Marquardt等最小二乘优化求解方法!

OMG! 数学公式太多也太难懂了,还是直接上图把条理整理清楚!















 275
275











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









