







参考:
- 基于物理的建模与动画 [美] Donald H. House(唐纳德·豪斯),John C. Keyser(约翰·凯泽) 著,叶劲峰 等 译
- 王华民 GAME103 课程
- Baraff, D. (2001). Physically based modeling: Rigid body simulation. SIGGRAPH Course Notes, ACM SIGGRAPH, 2(1), 2-1.
刚体只有两个运动:平移和旋转。
平移非常简单,就不用说了。关键是旋转。
如何描述旋转的大小?用四元数/旋转矩阵/欧拉角
三者都是描述的同一件事情,但是表示方式不同而已。
一般在图形学里就用四元数,因为它是对计算机来说计算最简单的。
(四元数的详细内容可以查看我之前讲的博客:四元数
某个点旋转绕着某个轴旋转,用四元数表示为
q
=
(
c
o
s
θ
/
2
,
s
i
n
θ
/
2
u
^
)
q = (cos\theta/2, sin\theta/2 \hat u)
q=(cosθ/2,sinθ/2u^)
u
^
=
(
a
,
b
,
c
)
\hat u=(a,b,c)
u^=(a,b,c)确定的是转轴,是个单位向量。
θ
\theta
θ角度就是旋转的角度。
如何描述旋转的速度?用角速度
ω \mathbf{\omega} ω
这个角速度是一个三维的向量。它的长度表示旋转的角速度速率,它的方向表示旋转的转轴。
四元数转换点坐标
用四元数描述旋转,那么刚体上的每个点如何计算其位置呢?
假设任意点
r
=
(
x
,
y
,
z
)
\mathbf{r}=(x,y,z)
r=(x,y,z)
那么经过四元数旋转后就是
(
0
,
r
)
=
(
0
,
r
)
q
(0, \mathbf{r}) = (0, \mathbf{r})q
(0,r)=(0,r)q
更新旋转
知道了旋转的大小和速度,那么类比平移,就可以更新下一时刻的旋转
我们知道旋转用四元数q来表示,于是问题就是如何利用角速度更新q。
更新公式如下
q
=
q
+
Δ
t
2
(
0
,
ω
)
q
q = q + \frac{\Delta t}{2} (0, \mathbf{\omega})q
q=q+2Δt(0,ω)q
注意这里有个1/2是为什么呢?
因为实际上更新q用的是q对时间的导数。而q对时间的导数有如下公式
q
˙
=
1
2
(
0
,
ω
)
q
\dot q = \frac{1}{2}(0, \mathbf{\omega})q
q˙=21(0,ω)q
这点和平移有区别。
计算角速度
目前还有个问题:我如何计算角速度呢?
类比速度是由力所造成的加速度驱动的,那么角速度就是由力矩所造成的角加速度驱动的。
我们先要计算力矩,然后计算角加速度,最后更新就得到了角速度。
ω
=
ω
+
Δ
t
a
w
\mathbf{\omega} =\mathbf{\omega} + \Delta t \mathbf{a_w}
ω=ω+Δtaw
我们这里角加速度记作
a
w
\mathbf{a_w}
aw
计算角加速度
那么如何计算角加速度呢?
类比牛顿第二定律,加速度为力
a
=
F
/
m
\mathbf{a} = \mathbf{F}/m
a=F/m
那么
a
w
=
I
−
1
τ
\mathbf{a_w} = \mathbf{I^{-1}} \mathbf{\tau}
aw=I−1τ
分子就是力矩,分母是惯性张量。
计算力矩
力矩显然也和力一样,符合叠加原理
τ
=
∑
τ
i
\mathbf{\tau} =\sum \mathbf{\tau_i}
τ=∑τi
也就是找到物体上每个质点的力矩,叠加后就是整个物体的力矩。为此我们必须先将整个物体离散成许多质点。离散得越多,精度显然就越高。
对于每个质点怎么计算力矩呢?
τ
i
=
r
i
×
f
i
\mathbf{\tau_i} = \mathbf{r_i}\times \mathbf{f_i}
τi=ri×fi
这里r_i是矢径,即质点到之心的距离。后面的f_i显然是每个质点的受力。
那么如何计算矢径呢?显然我们必须得先知道质心在哪。
计算质心和矢径
质心就是矢径对质量的平均
r
c
e
n
t
e
r
=
∑
r
0
i
m
i
∑
m
i
r_{center} = \frac{\sum r_{0i} m_i}{\sum m_i}
rcenter=∑mi∑r0imi
r 0 i r_{0i} r0i就是初始时刻的时候各个质点的坐标位置。
于是矢径为
r
i
=
r
0
i
−
r
c
e
n
t
e
r
\mathbf{r_i} = \mathbf{ r_{0i} }- \mathbf{r_{center}}
ri=r0i−rcenter
注意质心和矢径只需要最开始计算一次就够了,因为我们的矢径是相对于质心不变的。这是因为刚体内部各个位置不发生相对位移(也就是不会变形)
计算惯性张量I
惯性张量详细的内容可以查看我之前讲过的一个博客:惯性张量
惯性张量是个二阶张量,可以以矩阵形式表示:

很遗憾的是,惯性张量和质量不同:旋转之后,它是变化的!
(更严谨的说法是在世界坐标下,它是变化的)
这就造成了很多麻烦。如果每次旋转之后都要遍历一遍所有质点计算惯性张量,那么可想而知其麻烦程度和计算量有多大!
幸运的是:我们可以借助旋转矩阵来更新惯性张量。这样,我们只要最开始计算一遍惯性张量,后面就再也不必计算了!每次只需要用旋转矩阵更新就好了。更新的公式如下
I = R I 0 R T \mathbf{I} = \mathbf{R} \mathbf{I_0} \mathbf{R^T} I=RI0RT
这样只需要做两次矩阵乘法就够了。但是我们在此之前必须先计算旋转矩阵。
这也是为什么我们明明用四元数描述旋转,但是却还是得用旋转矩阵。
实际上,我们用到的其实是惯性张量的逆(上面那个类比牛顿第二定律的公式)。那既然这样,不如我一开始计算的就是逆矩阵,后面更新的也是逆矩阵。
I − 1 = R I 0 − 1 R T \mathbf{I^{-1}} = \mathbf{R}\mathbf{I_0^{-1}}\mathbf{R^T} I−1=RI0−1RT
四元数转换旋转矩阵
这里推导有些复杂,我们直接抄Wiki上的公式:
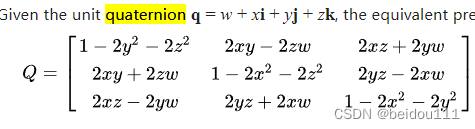
别看这个公式复杂,但是它的每一项只需要计算一次。相较于直接计算惯性张量(每一项都有对所有质点的求和),大大节约了计算量。
它的计算次数为9,另外有两次矩阵相乘(我们姑且认为每个矩阵乘法计算9次),所以总计算量为9+2*9=27次
而直接用惯性张量则每次要计算m*9次(m是质点数,看你离散的程度,越多力矩计算越精确)。假如用100个质点去离散,那么就用900次。
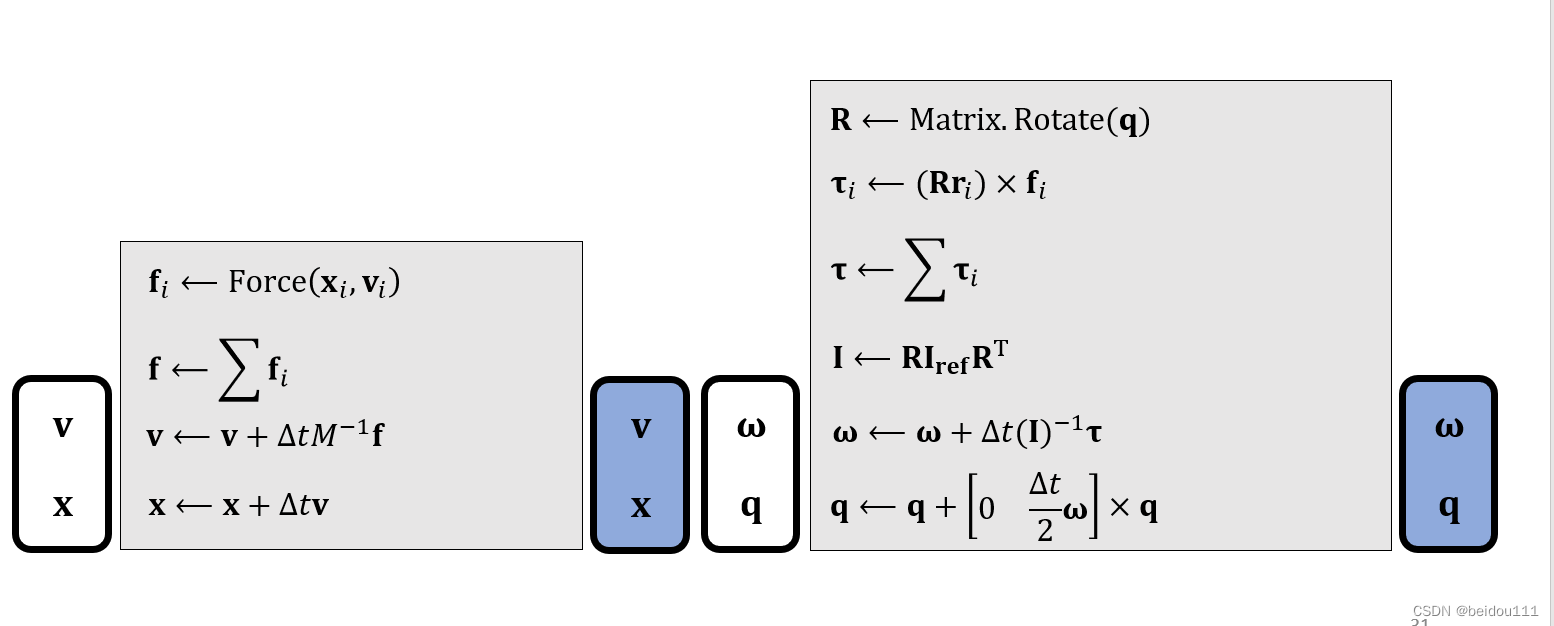
总结
- 旋转用四元数表示,四元数乘以原来的3维点坐标就是旋转后的点坐标
- 四元数的更新方式是用角速度时间积分(注意有个1/2,这是四元数对时间求导得到的)
- 更新角速度的方式是用角加速度。类比牛顿第二定律,惯性张量的逆乘以力矩就是角加速度。为此需要即使算力矩和惯性张量。
- 计算力矩的方式是矢径乘以各个质点的力,为此要先求出质心才能求出矢径
- 计算惯性张量较为麻烦,要用一个矩阵遍历所有质点。而且随着旋转,惯性张量总是变的。但是幸运的是可以用旋转矩阵更新惯性张量。只要计算一次,之后不断更新就好了。
- 为此需要将四元数转换到旋转矩阵。这也是为什么明明采用了四元数,却还是要计算旋转矩阵。这仅仅是为了节约计算量。
(王华民 GAME103 )















 1276
1276











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









