







三维ToF技术是机器视觉工业重要里程碑,它通过使用低成本CMOS像素阵列和主动调制光源技术来提供三维场景的距离景深图。所以不同于单点逐点扫描方式,而是每个像素都能测量对应目标体的亮度和反射回来的调制光的到达时间,从而计算出该点对应的距离景深。3D ToF提供了视角范围内场景的整个分辨率的距离景深数据。该技术结构简单,容易使用,不依赖环境光,高精度和高帧率使得ToF相机应用越来越广。
1. 脉冲调制与连续调制波
三维 ToF 相机通过主动发射调制过的光源到目标面上,然后观察计算反射回来的对应光。发射和反射光之间的相位差通过运算和转换得到距离/景深,如图1 所示。一般来说,主动发射光源是850nm 波长的固态激光管或者发光二极管LED,对人眼来说是不可见光(可见光波长范围:400~700nm)。一个特制的成像传感器用来接受同样频谱的光线,并且转换光子能量到电子电流。需要注意,光线进入该传感器有一个环境光分量和反射光分量。距离(景深)信息就存在反射光分量中。因此,高环境光分量会降低测量的信噪比。
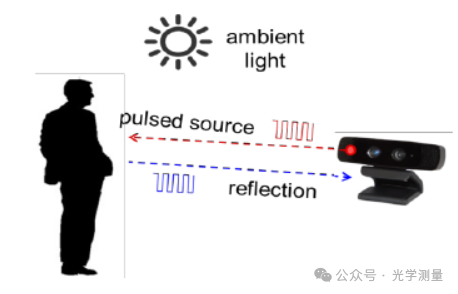
图1 TOF相机工作原理
为了检测发射与反射光之间相位差,光源必须是脉冲或者连续调制波,一般是正玄波或者方波。而方波会更常见,因为容易通过数字电路来实现。通过收集反射光电子或者在第一次检测到反射时启动一个快速计数器,来实现脉冲波接受。而后者需要快速光子检测器。这个计数器需要非常快速,因为比如1 毫米精度只需要6.6 皮秒(负12 次方)。这个精度水平对于硅半导体在室温下是不可能实现的。


脉冲波 调制波
图2 iTOF测量方式
脉冲调制波方法是比较直接的。光源发射一段周期(Δt),然后传感器每个像素采样反射光能量,并行地,使用2 个反相的计算窗口C1,C2 和相同的Δt 时间。在采样时间内像素点按窗口开启电荷累计,Q1 和Q2,然后测量出并且通过公式1 计算每个像素点对应的距离。
d= ½*c*Δt*Q2/(Q1+Q2) (1)
作为对比,连续调制波使用多个采样计算窗口测量,每个计算窗口相位延时90°(0°,180°,90°,270°),共4 个,也称4-quad。使用该4 步相移方法,发射与反射光的相位差𝝋和测量距离d 有如下公式:
I=Q1-Q2 (2)
Q=Q3-Q4 (3)
𝝋= arctan[Q/I] =arctan[(Q3-Q4)/(Q1-Q2)] (4)
d=½*c* 𝝋/2π*f (5)
同时像素点测量到反射光的亮度A 和偏置B 计算公式如下:
 (6)
(6)
 (7)
(7)
以上所有公式中 c 为光速常量。
连续调制波使用多个测量窗口,(Q3-Q4)及(Q1-Q2)可以减掉测量中的共同成分(复位电压,环境光,电容增益等)及其中的偏差。
2. ToF 测量精度误差
反射光亮度A 和偏置B 会影响距离景深测量的精度,误差近似于如下公式:
 (8)
(8)
调制对比度 Cd,是描述传感器分离和收集光电子的质量。反射光亮度A, 是光的能量。偏置B 是环境光和系统偏置。可以看到,更高亮度A, 更快调制频率f 和更高调制对比度Cd,会提高测量精度,但是更高偏置B 会降低测量精度。
另外,受限于硅片物理特性,调制频率太高会导致调制对比度衰减,所以调制频率也有个上限。具有较高衰减频率的传感器就能提供更高精度。
3. N 相步N-Quad 工作原理
4 步相移测量法经常使用0°,180°,90°,270°这4 相来计算,但有时这不是最好的,有时3步相移或5步相移可以更好消除奇数谐波。同上理论也可以扩展到N-quad 系统,有如下公式。可以看到,当N=4 时,sin() 和cos()系数简单等于-1,0,1,而当N≠ 4 时,sin() 和cos()系数不再等于-1,0,1,而是对应正、余弦值。
![]() (9)
(9)
![]() (10)
(10)
![]() (11)
(11)
![]() (12)
(12)
![]() (13)
(13)
以上参数I、Q 对应于Phase 可以制成如下图型来直观表达。I 是余弦分量,Q 是正弦分量,Confidence置信度值是半径R,也就是反射光亮度的指示,相位差Phase 是由I 和Q 构成的角度,也就是测量距离信息。Noise 噪音是R,I,Q 的扰动波动。如果Confidence 更高,那么图中半径更大,因此由噪音造成的Phase 失真就越小。另外,Confidence 更高,信噪比SNR 也就更高。

图 3 参数关系--I,Q 对应于 Phase
Confidence 的公式如下:
![]() (14)
(14)
4. 扩展测量距离-- 多频技术
连续调制波 CW 测量是基于相位差,而相位每2𝜋𝜋就会重叠,这也意味着测量距离会混叠。发生混叠的测量距离称之为damb,如公式:
![]() (15)
(15)
damb 也就是最大的可测量距离。如果希望扩展可测量的距离,可以降低连续调制波频率f,但是这会增大测量的误差,如公式8。为了扩展测量距离同时不影响精度,先进的ToF 系统会采用多频技术,可以在不降低调制频率f 的同时来实现扩展。多频技术是增加一个或者多个频率调制波来混频,每个调制波测量都有不同的不明确的距离,但是真实距离就是多个频率调制波共同测量到的那个值,该位置对应频率也就是多个频率的最大公约数,称为beat frequency 击打频率。击打频率一般会更低,也就扩展更长测量距离。
双频技术如下图所示:
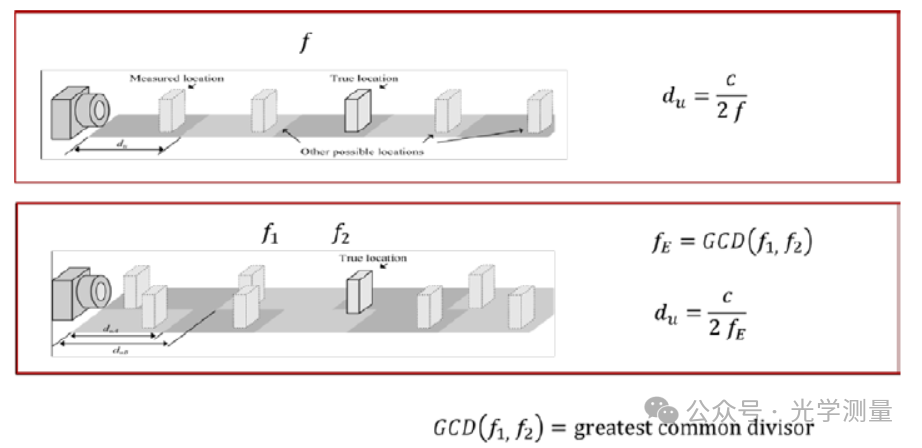
图 4 :使用多频技术扩展测量距离
来源:TI《3D ToF 三维场景距离(景深)测量系统简介》

















 3865
3865

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









