







将笛卡尔坐标系的电压 [ U x , U y ] [U_x, U_y] [Ux,Uy] 通过旋转变换(由锁相环角度 θ P L L \theta_{PLL} θPLL 控制)转换为 dq 坐标系下的电压 [ U d , U q ] [U_d, U_q] [Ud,Uq]。这个公式是非线性的,因为它涉及到正弦和余弦函数。
图片中的推导过程主要描述了在变流器控制中,从静止坐标系(xy坐标系)到旋转坐标系(dq坐标系)的变换关系,并进一步通过线性化近似来简化该变换。
xy坐标系(αβ)到dq坐标系的变换关系
变换公式如下:
( U d , i U q , i ) = ( cos θ P L L , i sin θ P L L , i − sin θ P L L , i cos θ P L L , i ) ( U x , i U y , i ) \begin{pmatrix} U_{d,i} \\ U_{q,i} \end{pmatrix} = \begin{pmatrix} \cos \theta_{PLL,i} & \sin \theta_{PLL,i} \\ -\sin \theta_{PLL,i} & \cos \theta_{PLL,i} \end{pmatrix} \begin{pmatrix} U_{x,i} \\ U_{y,i} \end{pmatrix} (Ud,iUq,i)=(cosθPLL,i−sinθPLL,isinθPLL,icosθPLL,i)(Ux,iUy,i)
( I d , i I q , i ) = ( cos θ P L L , i sin θ P L L , i − sin θ P L L , i cos θ P L L , i ) ( I x , i I y , i ) \begin{pmatrix} I_{d,i} \\ I_{q,i} \end{pmatrix} = \begin{pmatrix} \cos \theta_{PLL,i} & \sin \theta_{PLL,i} \\ -\sin \theta_{PLL,i} & \cos \theta_{PLL,i} \end{pmatrix} \begin{pmatrix} I_{x,i} \\ I_{y,i} \end{pmatrix} (Id,iIq,i)=(cosθPLL,i−sinθPLL,isinθPLL,icosθPLL,i)(Ix,iIy,i)
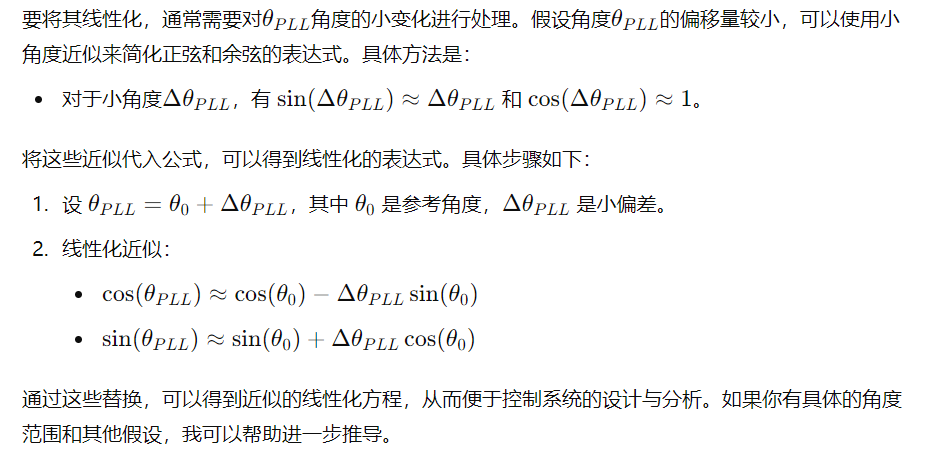
假设角度 θ P L L , i \theta_{PLL,i} θPLL,i 小偏差为 Δ θ P L L , i \Delta \theta_{PLL,i} ΔθPLL,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 5372
5372

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











