







实现条件
- 相机图像、内参矩阵[3×3]、形变参数[1×5]
- 雷达点云
- 二者外参[4×4], 包含旋转、平移
上代码
导入库文件
import open3d as o3d
import cv2
from PIL import Image
from pylab import *
import matplotlib.pyplot as plt
IMAGE_FILE = "/home/txz/数据集/0318_1613/1650/png/000.png"
PCD_FILE = "/home/txz/数据集/0318_1613/1650/pcd/1679129443.995743513.pcd"
extrinsic = "/home/txz/lidar_camera_ws/data_set/result/extrinsic.txt"
cloud = o3d.io.read_point_cloud(PCD_FILE) # 需要准备自己的pcd文件
cloud = np.asarray(cloud.points)
# 参数提取
L2C_MAT = np.loadtxt(extrinsic, delimiter=",",dtype=np.float32)
rot_mat = L2C_MAT[:3,:3]
# 经过矩阵转置,以及罗德里格斯变换得到的旋转矩阵
rvec,_ = cv2.Rodrigues(rot_mat)
# 经过排序修改后得到的平移矩阵
tvec = L2C_MAT[:3,3]
# 相机内参
camera_matrix = np.array([909.5165940000001, 0, 613.6350650000001, 0, 913.203517, 396.620893, 0, 0, 1]).reshape(-1,3)
# 相机形变
distCoeffs = np.array([0.08947899999999999, -0.06453299999999999, -0.002094, -0.011071, 0])
# 进行点云由3D到2D的转换
point_2d, _ = cv2.projectPoints(cloud, rvec, tvec, camera_matrix, distCoeffs)
# 重投影绘制在图像上
im = cv2.imread(IMAGE_FILE, cv2.IMREAD_COLOR)
x = []
y = []
m = -1
for point in point_2d[::]:
m = m+1
x_2d = point[0][0]
y_2d = point[0][1]
if 0 <= x_2d <= 1280 and 0 <= y_2d <= 720:
x.append(x_2d)
y.append(y_2d)
x = np.array(x)
y = np.array(y)
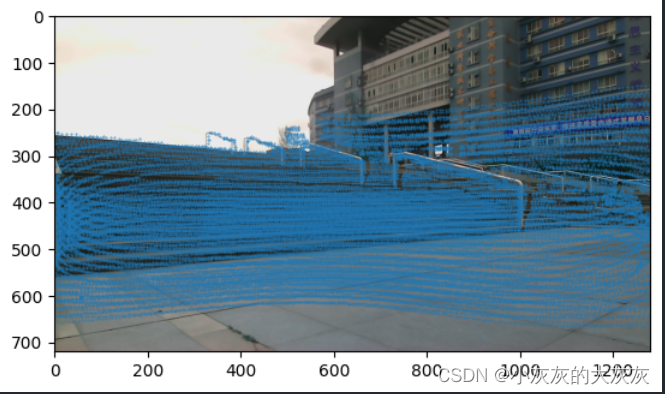
plt.scatter(x, y, s=0.1)
plt.imshow(im)
plt.show()
原始图像

投影结果


















 6330
6330

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











