







点击进入专栏:
《人工智能专栏》 Python与Python | 机器学习 | 深度学习 | 目标检测 | YOLOv5及其改进 | YOLOv8及其改进 | 关键知识点 | 各种工具教程
文章目录
- 1. NMS介绍
- 2. NMS算法流程
- 3. NMS 过程图例
- 3.1 单类别例子
- 3.2 多类别例子
- 4. Soft-NMS(ICCV2017)
- 5. Weighted-NMS(ICMEW2017)
- 6. 分类置信度优先NMS总结
- 7. IOU-Guided NMS/IOU-Net(ECCV2018)
- 8. Softer NMS(CVPR2019)
- 9. Adaptive NMS(CVPR2019)
- 10. DIOU-NMS(AAAI2020)
- NMS总结
- 参考文献
- 精度提升
- 分类优先
- 定位优先
- 加权平均
- 方差加权平均
- 自适应阈值
- +中心点距离
- 效率提升
- 加速的关键
- IoU矩阵的妙用
- Fast NMS
- Cluster NMS
- Matrix NMS
- **总结**:
- **总结**:
- 推荐阅读:
- 1. 机器学习
- 2. 深度学习与目标检测
- 3. YOLOv5
- 4. YOLOv5改进
- 5. YOLOv8及其改进
- 6. Python与PyTorch
- 7. 工具
- 8. 小知识点
- 9. 杂记
1. NMS介绍
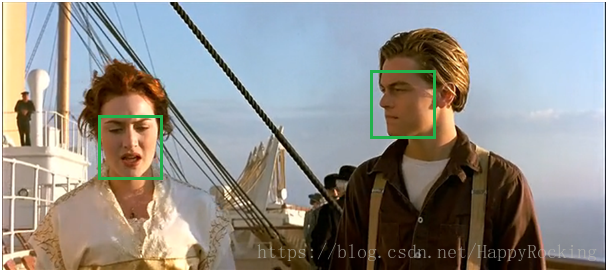
在执行目标检测任务时,算法可能对同一目标有多次检测。NMS是一种让你确保算法只对每个对象得到一个检测的方法,即“清理检测”。如下图所示:
如果用一句话概括NMS的意思就是:筛选出一定区域内属于同一种类别得分最大的框

2. NMS算法流程
NMS 算法的大致过程:每轮选取置信度最大的 Bounding Box ,接着关注所有剩下的 BBox 中与选取的 BBox 有着高重叠(IoU)的,它们将在这一轮被抑制。这一轮选取的 BBox 会被保留输出,且不会在下一轮出现。接着开始下一轮,重复上述过程:选取置信度最大 BBox ,抑制高 IoU BBox。
NMS 算法流程:这是一般文章中介绍的 NMS,比较难懂。但实际上 NMS 的实现反而简单很多。

3. NMS 过程图例
- 单类别 NMS 的例子:有两只狗,怎样用 NMS 保证只留下两个 BBox?
- 多类别 NMS 的例子,有1只狗1只猫,我们怎么用NMS将侦测到的物件框将把猫和狗框出来。
3.1 单类别例子
1)理解 BBox 输入或输出格式,通常会见到两种格式:
- 第一种,BBox 中心位置(x, y) + BBox 长宽(h, w) + Confidence Score;
- 第二种,BBox 左上角点(x1,y1) + BBox 右下角点(x2,y2) + Confidence Score;
两种表达的本质是一样的,均为五个变量。与 BBox 相关的四个变量用于计算 IoU,Confidence Score 用于排序。
2)理解评估重叠的 IoU 指标,即“交并比”,如下图所示:

3)步骤:
第一步:对 BBox 按置信度排序,选取置信度最高的 BBox(所以一开始置信度最高的 BBox 一定会被留下来);
第二步:对剩下的 BBox 和已经选取的 BBox 计算 IoU,淘汰(抑制) IoU 大于设定阈值的 BBox(在图例中这些淘汰的 BBox 的置信度被设定为0)。
第三步:重复上述两个步骤,直到所有的 BBox 都被处理完,这时候每一轮选取的 BBox 就是最后结果。

具体流程
-
「确定是物体集合」= {空集合}
-
Run 1: 先将BBox依照置信度排序,置信度最高的BBox (红色) 会被选入「确定是物体集合」內,其他BBox会根据这步骤选出最高的BBox进行IoU计算,如果粉红色的IoU为0.6大于我们设定的0.5,所以将粉红色的BBox置信度设置为0。
此时「确定是物件集合」= {红色BBox }
-
Run 2: 不考虑置信度为0和已经在「确定是物体集合」的BBox,剩下來的物体继续选出最大置信度的BBox,将此BBox(黄色)丟入「确定是物体集合」,剩下的BBox和Run2选出的最大置信度的BBox计算IoU,其他BBox都大于0.5,所以其他的BBox置信度設置为0。
此时「确定是物件集合」= {红色BBox; 黄色BBox}
-
因为沒有物体置信度>0,所以结束NMS。
「确定是物件集合」= {红色BBox; 黄色BBox}。
在上面这个例子中,NMS 只运行了两轮就选取出最终结果:第一轮选择了红色 BBox,淘汰了粉色 BBox;第二轮选择了黄色 BBox,淘汰了紫色 BBox 和青色 BBox。注意到这里设定的 IoU 阈值是0.5,假设将阈值提高为0.7,结果又是如何?

可以看到,NMS 用了更多轮次来确定最终结果,并且最终结果保留了更多的 BBox,但结果并不是我们想要的。因此,在使用 NMS 时,IoU 阈值的确定是比较重要的,但一开始我们可以选定 default 值(论文使用的值)进行尝试。由此可以知道,如果IoU阈值设定太高,可能会造成物件重复检测的问题。
3.2 多类别例子
第二个例子,有1只狗1只猫,我们怎么用NMS将侦测到的物件框将把猫和狗框出来

前面的范例一是标准的NMS程序,这边要搭配一下分类来看,范例二和标准NMS做法一样,先将「确定是物件集合」选出来,此例是NMS选出的BBox是{紫色BBox ; 红色BBox}。
这时候再搭配一下分类的机率,就可以把每个NMS选出的BBox做类别判断了(如下图,每个BBox都会带有一组机率)

这边附上实际做法,先用一个阈值先初步去掉一些候选的BBox,不然假设一张图预选出一万个BBox,后面用CPU计算NMS会很花时间,所以会依据BBox的confidence score先去掉一些没用的BBox,然后再做NMS,如下图

如果是two stage算法,通常在选出BBox只会带有BBox中心位置(x, y)、BBox长宽(h, w)和confidence score,不会有类别的机率,因为程序是先选出BBox,在将选出BBox的feature map做rescale (一般用ROI pooling),然后再用分类器分类。
但如果是one stage作法,是直接BBox带有BBox中心位置(x, y)、BBox长宽(h, w)和confidence score,以及相对应的分类机率,相对于two stage少了后面rescale和分类的程序,所以计算量相对小。
虽然NMS可以处理掉较多的冗余框,但传统的NMS存在以下局限性:
- 循环步骤,GPU难以并行处理,运算效率低
- 以分类置信度为优先衡量指标 分类置信度高的定位不一定最准,降低了模型的定位准确度
- 直接提高阈值暴力去除bbox 将得分较低的边框强制性地去掉,如果物体出现较为密集时,本身属于两个物体的边框,其中得分较低的框就很有可能被抑制掉,从而降低了模型的召回率,且阈值设定完全依赖自身经验。
4. Soft-NMS(ICCV2017)
- NMS设定的局限性显然,对于
IoU≥NMS阈值的相邻框,传统NMS的做法是将其得分暴力置0,相当于被舍弃掉了,这就有可能造成边框的漏检,尤其是有遮挡的场景。 - Soft-NMS解决方案对
IoU大于阈值的边框,Soft-NMS采取得分惩罚机制,降低该边框的得分,即使用一个与IoU正相关的惩罚函数对得分进行惩罚。当邻居检测框b与当前框M有大的IoU时,它更应该被抑制,因此分数更低。而远处的框不受影响。


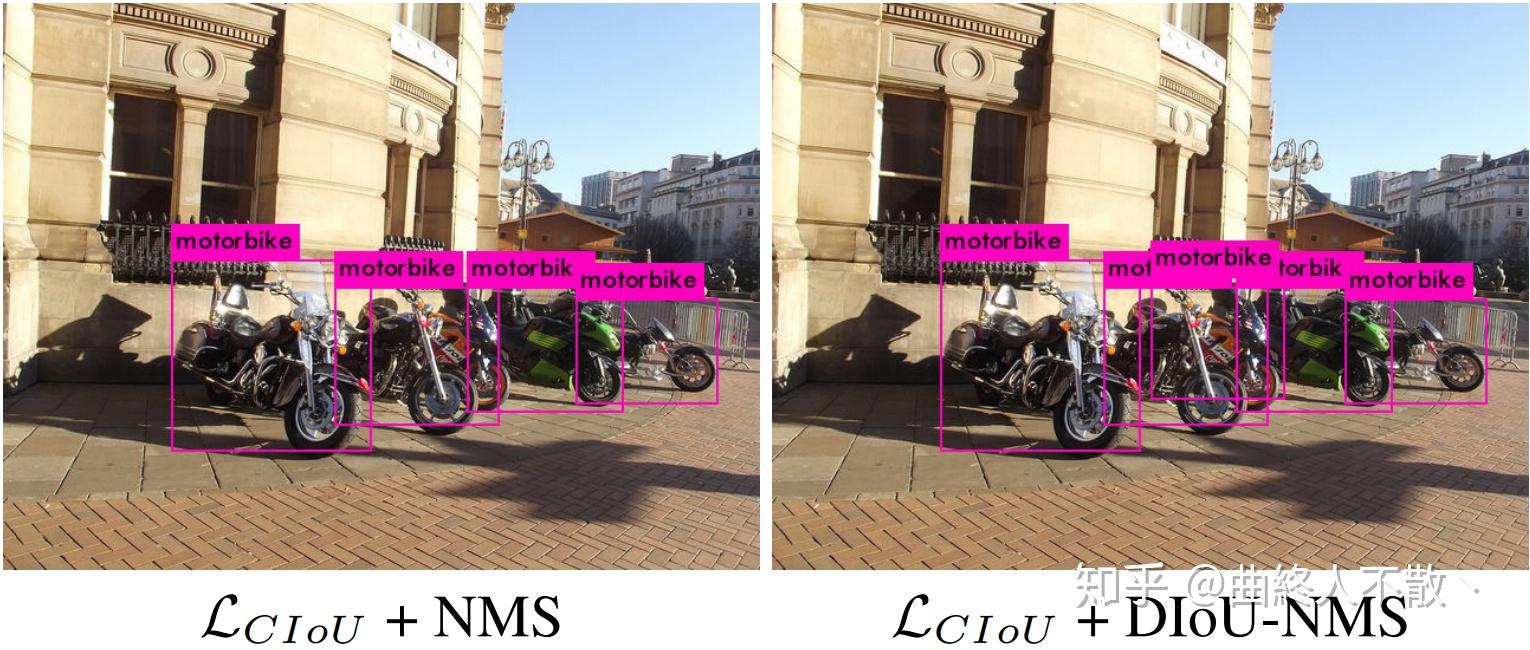
从实验结果来看的话,soft-NMS(红色)能够比较好的缓解掉传统NMS(蓝色)暴力剔除所带来的物体遮挡漏检情况。
Soft-NMS的类型
- 线性衰减型(不连续,会发生跳变,导致检测结果产生较大的波动);
- 指数高斯型(更为稳定、连续、光滑)
Soft-NMS的局限性
- 仍采用循环遍历处理模式,而且它的运算效率比
Traditional NMS更低。 - 对双阶段算法友好,但在一些单阶段算法上可能失效。(所以看
soft-NMS论文时会发现它只在two-stage模型上比较,可能是因为one-stage模型在16年才提出来,之后才开始大火)soft-NMS也是一种贪心算法,并不能保证找到全局最优的检测框分数重置。 - 遮挡情况下,如果存在location与分类置信度不一致的情况,则可能导致location好而分类置信度低的框比location差分类置信度高的框惩罚更多
- 评判指标是
IoU,即只考虑两个框的重叠面积,这对描述box重叠关系或许不够全面。
5. Weighted-NMS(ICMEW2017)
如果前面讲的Soft NMS是通过抑制机制来改善剔除结果(降低超阈值的得分策略),那么Weighted NMS(W-NMS)则是从极大值这个方面进行改进。W-NMS认为Traditional NMS每次迭代所选出的最大得分框未必是精确定位的,冗余框也有可能是定位良好的。因此,W-NMS通过分类置信度与IoU来对同类物体所有的边框坐标进行加权平均,并归一化。其中,加权平均的对象包括M自身以及IoU≥NMS阈值的相邻框。
-
优点:
Weighted NMS通常能够获得更高的Precision和Recall,一般来说,只要NMS阈值选取得当,Weighted NMS均能稳定提高AP与AR。 -
缺点:
(1)仍为顺序处理模式,且运算效率比
Traditional NMS更低。(2)加权因子是
IoU与得分,前者只考虑两个框的重叠面积;而后者受到定位与得分不一致问题的限制。

6. 分类置信度优先NMS总结
NMS、Soft-NMS及Weighted NMS的局限性:
- 都是以分类置信度优先的
NMS,未考虑定位置信度,即没有考虑定位与分类得分可能出现不一致的情况,特别是框的边界有模棱两可的情形时。 - 采用的都是传统的
IoU,只考虑两包围盒子之间的重叠率,未能充分反映两包围盒子之间相对位置关系。
7. IOU-Guided NMS/IOU-Net(ECCV2018)
前面所提到的NMS方法只将分类的预测值作为边框排序的依据。然而在某些场景下,分类预测值高的边框不一定拥有与真实框最接近的位置,因此这种标准不平衡可能会导致更为准确的边框被抑制掉。

之前NMS的局限性:
- 分类准确率和定位准确率的误匹配:从左下图看,
IoU与定位置信度高度相关(0.617),而与分类置信度几乎无关(0.217)。 - 边界框回归的非单调性与非可解释性:缺乏localization confidence使得被广泛使用的边界框回归方法缺少可解释性或可预测性。先前的工作曾指出bounding box迭代回归的非单调性,也就是说,应用多次之后bounding box回归可能有损bounding box定位表现。
在此背景下,旷视IOU-Net论文提出了IoU-Guided NMS,即一个预测框与真实框IoU的预测分支来学习定位置信度,进而使用定位置信度来引导NMS的学习。具体来说,就是使用定位置信度作为NMS的筛选依据,每次迭代挑选出最大定位置信度的框M,然后将IoU≥NMS阈值的相邻框剔除,但把冗余框及其自身的最大分类得分直接赋予M。因此,最终输出的框必定是同时具有最大分类得分与最大定位置信度的框。
IOU-Guided NMS优点:
- 通过该预测分解决了
NMS过程中分类置信度与定位置信度之间的不一致,可以与当前的物体检测框架一起端到端地训练,在几乎不影响前向速度的前提下,有效提升了物体检测的精度。 IoU-Guided NMS有助于提高严格指标下的精度,如AP75,AP90。(在IoU阈值较高时IoU-guided NMS算法的优势还是比较明显的(比如AP90),原因就在于IoU阈值较高时需要预测框的坐标更加准确才能有较高的AP值,这正好和IoU-guided NMS的出发点吻合。)
IoU-Guided NMS缺点:
- 顺序处理的模式,运算效率与
Traditional NMS相同。 - 需要额外添加
IoU预测分支,造成计算开销。 - 评判标准为
IoU,即只考虑两个框的重叠面积。
8. Softer NMS(CVPR2019)
总体概览从Softer-NMS的公式来看,Softer-NMS可以看成是前面三种NMS变体的结合,即:其极大值的选择/设定采用了与类似Weighted NMS(加权平均)的方差加权平均操作,其加权的方式采用了类似Soft NMS的评分惩罚机制(受Soft-NMS启发,离得越近,不确定性越低,会分配更高的权重),最后,它的网络构建思路与IOU-Guided NMS相类似。

与IOU-Guided NMS区别Softer-NMS与IOU-Guided NMS的出发点同样是解决定位与分类置信度之间非正相关的问题,所采用的思路一样是增加一个定位置信度的预测,但不一样的是前面提到的IoU-Guided NMS采用IoU作为定位置信度来优先排序,而这里Softer-NMS则是通过定位分布的方差来拉近预测边框与真实物体分布,即IoU-Guided NMS采用IoU作为定位置信度而Softer-NMS采用坐标方差作为定位置信度,具体的做法就是通过KL散度来判别两个分布的相似性。
其中,Softer NMS论文中有两个先验假设:
(1)Bounding box的是高斯分布
(2)ground truth bounding box是狄拉克delta分布(即标准方差为0的高斯分布极限)。
Softer-NMS的优点:
- 增加了定位置信度的预测,是定位回归更加准确与合理。
- 使用便捷,可以与
Traditional NMS或Soft-NMS结合使用,得到更高的AP与AR。
Softer-NMS的缺点:
- 顺序处理模式,且运算效率比
Traditional NMS更低。 - 额外增加了定位置信度预测的支路来预测定位方差,造成计算开销。
- 评判标准是
IoU,即只考虑两个框的重叠面积,这对描述box重叠关系或许不够全面。
9. Adaptive NMS(CVPR2019)
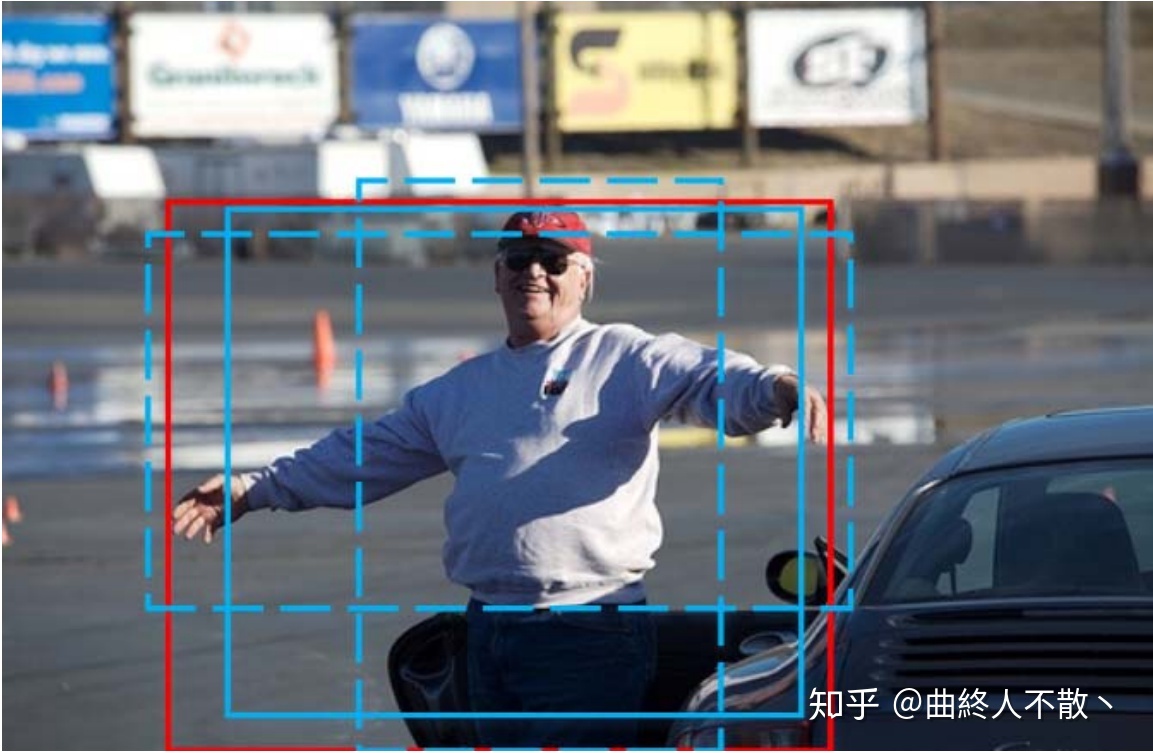
背景Adaptive NMS是在行人检测问题上来对Soft NMS改进的一种自适应阈值处理方法(即在软化得分的前提下继续软化阈值)。行人检测任务中,一个最大的问题就是目标在常规场景下一般处于密集状态。如何在解决密集检测以及密集检测之中目标之间相互遮挡的问题是行人检测的一大问题。在以往的研究中,NMS都采用单一阈值的处理方式。使用单一阈值的NMS会面临以下困境:较低的阈值会导致丢失高度重叠的对象(图中蓝框是未检测出来的目标),而较高的阈值会导致更多的误报(红框是检测错误的目标)。
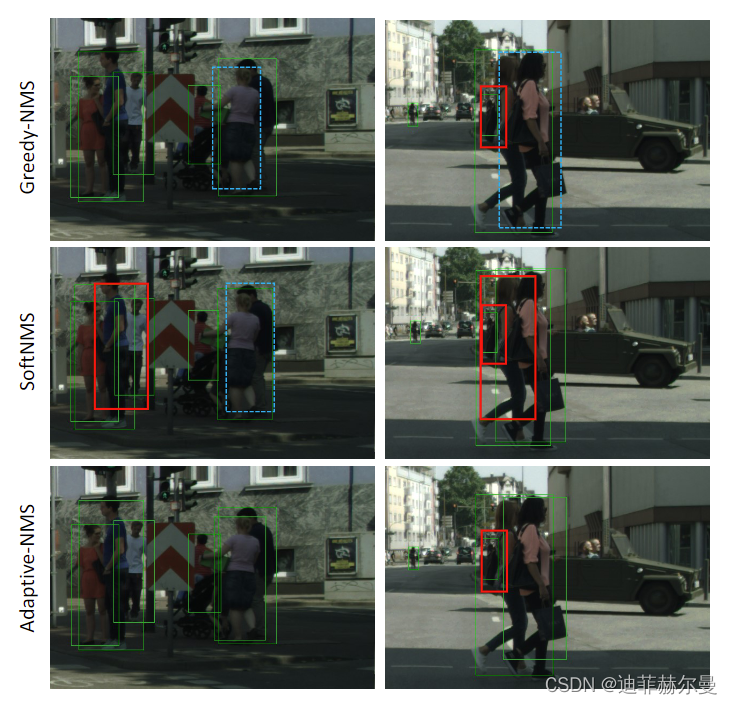
所以,在密集检测场景中,我们希望:(1)在目标密集时,可以使用较大的阈值以保证更高的召回率;(2)在目标稀疏时,可以使用较小的阈值来剔除掉更多冗余的检测框。
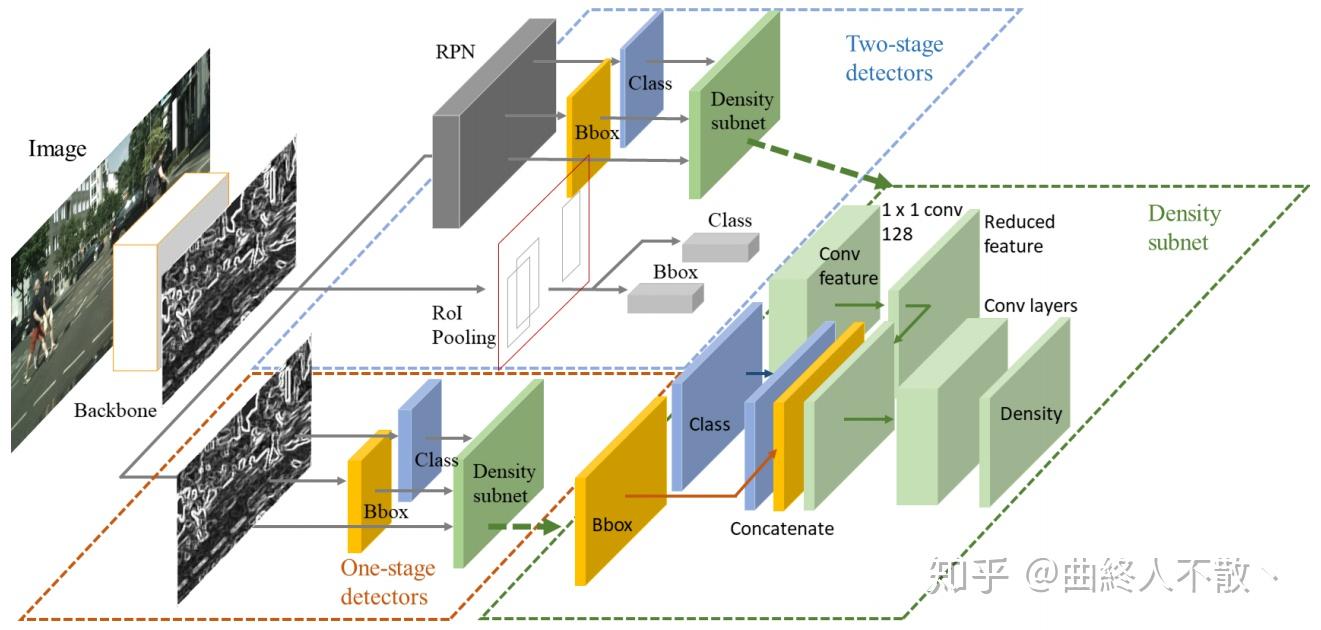
思路与方法基于上述背景,Adaptive NMS应用了动态抑制策略,通过设计计了一个Density-subnet网络预测目标周边的密集和稀疏的程度,引入密度监督信息,使阈值随着目标周边的密稀程度而对应呈现上升或衰减。具体做法:
- 当邻框远离M时(即
IoU<Nt),保持si不变;对于远离M的检测框,它们被误报的可能性较小,因此应该保留它们。 - 对于高度重叠的相邻检测,抑制策略不仅取决于与M的重叠,还取决于M是否位于拥挤区域。
- 当M处于密集区域时(即
Nm>Nt),目标密度dM作为NMS的抑制阈值;若M处于密集区域,其高度重叠的相邻框很可能是另一目标的真正框,因此,应该分配较轻的惩罚或保留。 - 当M处于稀疏区域时(即
Nm≤Nt),初始阈值Nt作为NMS的抑制阈值。若M处于稀疏区域,惩罚应该更高以修剪误报。
- 当M处于密集区域时(即
Adaptive NMS优点:
- 可以与前面所述的各种
NMS结合使用。 - 对遮挡案例更加友好。
- 双阶段和单阶段的检测器都有效果。(CVPR2019 Oral)
Adaptive NMS缺点:
- 与
Soft-NMS结合使用,效果可能倒退 (受低分检测框的影响)。 - 顺序处理模式,运算效率低。
- 需要额外添加密度预测模块,造成计算开销。
- 评判标准是
IoU,即只考虑两个框的重叠面积,这对描述box重叠关系或许不够全面。
10. DIOU-NMS(AAAI2020)
在以往的NMS中使用的评判指标都是IoU,但就像前面对IoU的介绍,IoU虽然简单直观,但它只考虑两个框的重叠面积(比如下图第一种相比于第三种越不太可能是冗余框)。因此,后面研究相继耶提出了许多IoU变体来使两框之间的相对位置关系描述更加准确。比如DIoU-NMS就直接将IoU指标换为DIoU。当然结合前面对IoU的介绍,这种换掉IoU指标的NMS变体也可以有很多。

DIOU-NMS优点:
- 从几何直观的角度,将中心点考虑进来有助于缓解遮挡案例。
- 可以与前述
NMS变体结合使用。 - 保持
NMS阈值不变的情况下,必然能够获得更高recall(因为保留的框增多了)。
DIOU-NMS缺点:
顺序处理模式,计算更复杂,运算效率更低。
NMS总结
实际上NMS的变体不止上面提到的方法,还有其他的变体,比如从文本场景中,NMS变体主要是一种基于shape的改变;而在遥感等实时场景中,NMS变体主要是加速策略的改变,提高的的计算效率。
从以上NMS的介绍,可以看出:目前,NMS对传统NMS算法的改进主要是从极大值的选择机制,抑制冗余框的机制,IoU的评价指标,anchor的形态、位置及其所处的环境(周边的密度)等方面来进行优化。虽然NMS算法一直在不断的优化,但未来更主流的方式是NMS-free。
参考文献
機器/深度學習: 物件偵測 Non-Maximum Suppression (NMS) | by Tommy Huang | Medium
https://mp.weixin.qq.com/s/jLnde0Xms-99g4z16OE9VQ
DIoU-NMS:Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression
soft-NMS(ICCV2017):Soft-NMS – Improving Object Detection With One Line of Code
Weighted-NMS(ICMEW2017):Inception Single Shot MultiBox Detector for object detection
IOU-Guided NMS/IOU-Net(ECCV2018):Acquisition of Localization Confidence for Accurate Object Detection
softer NMS(CVPR2019):Softer-NMS: Rethinking Bounding Box Regression for Accurate Object Detection.
Adaptive NMS(CVPR2019):Adaptive NMS: Refining Pedestrian Detection in a Crowd
DIOU-NMS(AAAI2020):Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression.
精度提升
众所周知,非极大值抑制NMS是目标检测常用的后处理算法,用于剔除冗余检测框,本文将对可以提升精度的各种NMS方法及其变体进行阶段性总结。
总体概要:
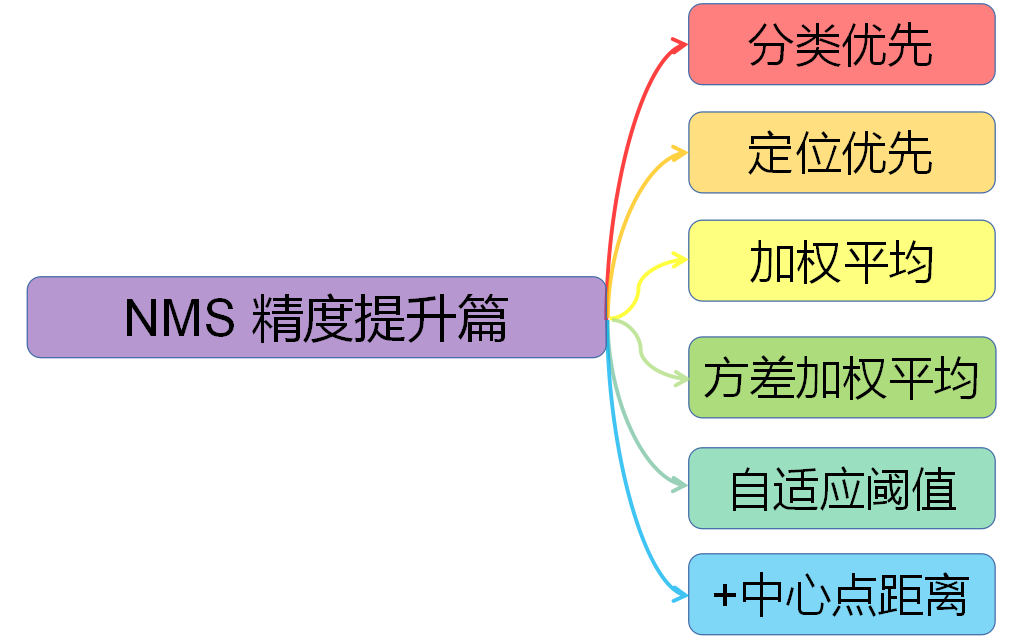
对NMS进行分类,大致可分为以下六种,这里是依据它们在各自论文中的核心论点进行分类,这些算法可以同时属于多种类别。
- 分类优先:传统NMS,Soft-NMS (ICCV 2017)
- 定位优先:IoU-Guided NMS (ECCV 2018)
- 加权平均:Weighted NMS (ICME Workshop 2017)
- 方差加权平均:Softer-NMS (CVPR 2019)
- 自适应阈值:Adaptive NMS (CVPR 2019)
- +中心点距离:DIoU-NMS (AAAI 2020)
分类优先
传统NMS有多个名称,据不完全统计可以被称为:Traditional / Original / Standard / Greedy NMS,为统一起见,下称Traditional NMS。
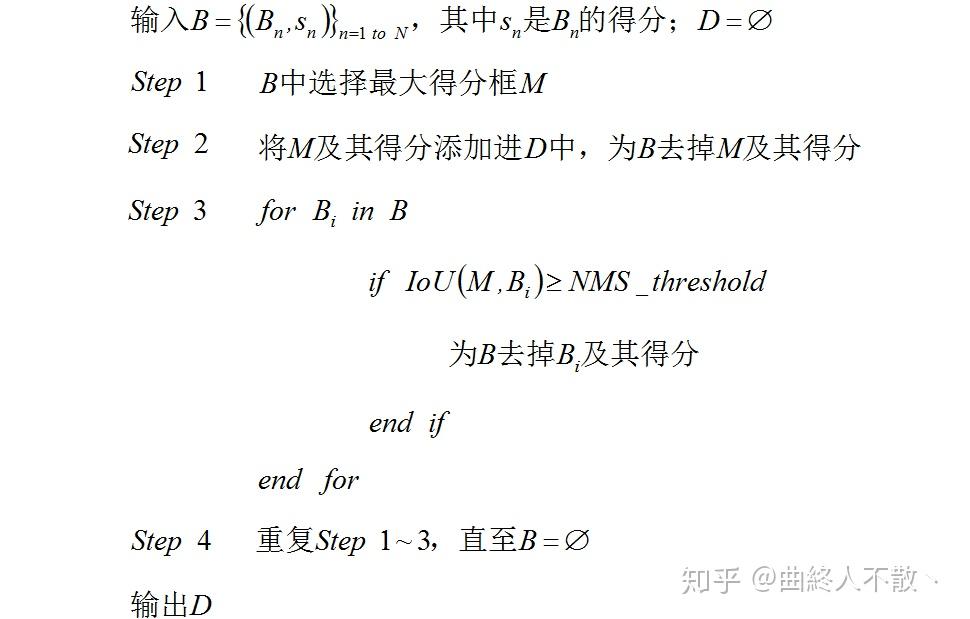
Traditional NMS算法是最为经典的版本,伪代码如下:
算法流程解读:
给出一张图片和上面许多物体检测的候选框(即每个框可能都代表某种物体),但是这些框很可能有互相重叠的部分,我们要做的就是只保留最优的框。假设有N个框,每个框被分类器计算得到的分数为Si, 1<=i<=N。
0、建造一个存放待处理候选框的集合H,初始化为包含全部N个框;
建造一个存放最优框的集合M,初始化为空集。
1、将所有集合 H 中的框进行排序,选出分数最高的框 m,从集合 H 移到集合 M;
2、遍历集合 H 中的框,分别与框 m 计算交并比(Interection-over-union,IoU),如果高于某个阈值(一般为0~0.5),则认为此框与 m 重叠,将此框从集合 H 中去除。
3、回到第1步进行迭代,直到集合 H 为空。集合 M 中的框为我们所需。
需要优化的参数:
IoU 的阈值是一个可优化的参数,一般范围为0~0.5,可以使用交叉验证来选择最优的参数。
示例:
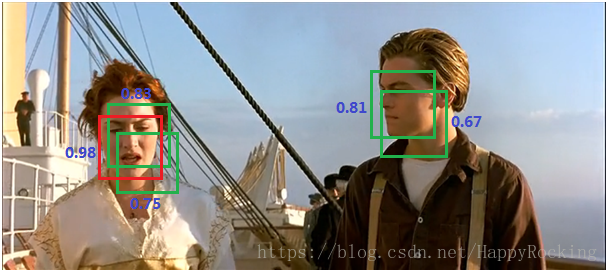
比如人脸识别的一个例子:
已经识别出了 5 个候选框,但是我们只需要最后保留两个人脸。
首先选出分数最大的框(0.98),然后遍历剩余框,计算 IoU,会发现露丝脸上的两个绿框都和 0.98 的框重叠率很大,都要去除。
然后只剩下杰克脸上两个框,选出最大框(0.81),然后遍历剩余框(只剩下0.67这一个了),发现0.67这个框与 0.81 的 IoU 也很大,去除。
至此所有框处理完毕,算法结果:
缺点:
- 顺序处理的模式,计算IoU拖累了运算效率。
- 剔除机制太严格,依据NMS阈值暴力剔除。
- 阈值是经验选取的。
- 评判标准是IoU,即只考虑两个框的重叠面积,这对描述box重叠关系或许不够全面。
Soft-NMS是Traditional NMS的推广,主要旨在缓解Traditional NMS的第二条缺点。
数学上看,Traditional NMS的剔除机制可视为
s i = { 0 , I o U ( M , B i ) ⩾ t h r e s h s i , I o U ( M , B i ) < t h r e s h s_i=\left\{ \begin{array}{lc} 0, & IoU(M,B_i)\geqslant thresh\\ s_i, & IoU(M,B_i)<thresh\\ \end{array}\right. si={0,si,IoU(M,Bi)⩾threshIoU(M,Bi)<thresh
显然,对于IoU≥NMS阈值的相邻框,Traditional NMS的做法是将其得分暴力置0。这对于有遮挡的案例较不友好。因此Soft-NMS的做法是采取得分惩罚机制,使用一个与IoU正相关的惩罚函数对得分 s 进行惩罚。
线性惩罚:
s i = { s i ( 1 − I o U ( M , B i ) ) , I o U ( M , B i ) ⩾ t h r e s h s i , I o U ( M , B i ) < t h r e s h s_i=\left\{ \begin{array}{lc} s_i(1-IoU(M,B_i)), & IoU(M,B_i)\geqslant thresh\\ s_i, & IoU(M,B_i)<thresh\\ \end{array}\right. si={si(1−IoU(M,Bi)),si,IoU(M,Bi)⩾threshIoU(M,Bi)<thresh
其中 M 代表当前的最大得分框。
线性惩罚有不光滑的地方,因而还有一种高斯惩罚:
s i = s i e − I o U ( M , B i ) 2 σ s_i=s_ie^{-\frac{IoU(M,B_i)^2}{\sigma}} si=sie−σIoU(M,Bi)2
在迭代终止之后,Soft-NMS依据预先设定的得分阈值来保留幸存的检测框,通常设为0.0001
该文对两种惩罚方法的超参数也进行了实验,结果验证了超参数的不敏感性。经本人实测,Soft-NMS在Faster R-CNN中的提升约有0.5-0.8个点的AP提升。
缺点:
- 仍然是顺序处理的模式,运算效率比Traditional NMS更低。
- 对双阶段算法友好,而在一些单阶段算法上可能失效。
- 如果存在定位与得分不一致的情况,则可能导致定位好而得分低的框比定位差得分高的框惩罚更多(遮挡情况下)。
- 评判标准是IoU,即只考虑两个框的重叠面积,这对描述box重叠关系或许不够全面。
定位优先
IoU-Guided NMS出现于IoU-Net一文中,研究者认为框的定位与分类得分可能出现不一致的情况,特别是框的边界有模棱两可的情形时。因而该文提出了IoU预测分支,来学习定位置信度,进而使用定位置信度来引导NMS。

具体来说,就是使用定位置信度作为NMS的筛选依据,每次迭代挑选出最大定位置信度的框 M ,然后将IoU≥NMS阈值的相邻框剔除,但把冗余框及其自身的最大分类得分直接赋予 M ,这样一来,最终输出的框必定是同时具有最大分类得分与最大定位置信度的框。
优点:
IoU-Guided NMS有助于提高严格指标下的精度,如AP75, AP90。
缺点:
- 顺序处理的模式,运算效率与Traditional NMS相同。
- 需要额外添加IoU预测分支,造成计算开销。
- 评判标准是IoU,即只考虑两个框的重叠面积,这对描述box重叠关系或许不够全面。
加权平均
多框共同决定一框
Weighted NMS出现于ICME Workshop 2017《Inception Single Shot MultiBox Detector for object detection》一文中。论文认为Traditional NMS每次迭代所选出的最大得分框未必是精确定位的,冗余框也有可能是定位良好的。那么与直接剔除机制不同,Weighted NMS顾名思义是对坐标加权平均,加权平均的对象包括 M 自身以及IoU≥NMS阈值的相邻框。
M=\frac{\sum\limits_iw_iB_i}{\sum\limits_iw_i},\quad B_i\in{B|IoU(M,B)\geqslant thresh}\cup{M}
加权的权重为 w_i=s_iIoU(M,B_i) ,表示得分与IoU的乘积。
优点:
Weighted NMS通常能够获得更高的Precision和Recall,以本人的使用情况来看,只要NMS阈值选取得当,Weighted NMS均能稳定提高AP与AR,无论是AP50还是AP75,也不论所使用的检测模型是什么。
缺点:
- 顺序处理模式,且运算效率比Traditional NMS更低。
- 加权因子是IoU与得分,前者只考虑两个框的重叠面积,这对描述box重叠关系或许不够全面;而后者受到定位与得分不一致问题的限制。
方差加权平均
Softer-NMS同样是坐标加权平均的思想,不同在于权重 w_i 发生变化,以及引入了box边界的不确定度。
关于目标检测box不确定度,可参考笔者的另一篇文章《一文了解目标检测边界框概率分布》
加权公式如下:
M = ∑ i w i B i / σ i 2 ∑ i w i / σ i 2 , B i ∈ { B ∣ I o U ( M , B ) ⩾ t h r e s h } ∪ { M } M=\frac{\sum\limits_iw_iB_i/\sigma_i^2}{\sum\limits_iw_i/\sigma_i^2},\quad B_i\in\{B|IoU(M,B)\geqslant thresh\}\cup\{M\} M=i∑wi/σi2i∑wiBi/σi2,Bi∈{B∣IoU(M,B)⩾thresh}∪{M}
其中权重 w_i=e{-\frac{(1-IoU(M,B_i))2}{\sigma_t}} 抛弃了得分 s_i ,而只与IoU有关。
在加权平均的过程中,权重越大有两种情形:1. 与 M 的IoU越大;2. 方差越小,代表定位不确定度越低。

var voting表示方差加权平均
优点:
- 可以与Traditional NMS或Soft-NMS结合使用。
- 通常可以稳定提升AP与AR。
缺点:
- 顺序处理模式,且运算效率比Traditional NMS更低。
- 需要修改模型来预测方差。
- 加权因子是IoU与方差,前者依然只考虑两个框的重叠面积,这对描述box重叠关系或许不够全面。
自适应阈值
以上这些NMS都基于这样的假设:与当前最高得分框重叠越大,越有可能是冗余框。
Adaptive NMS的研究者认为这在物体之间有严重遮挡时可能带来不好的结果。我们期望当物体分布稀疏时,NMS大可选用小阈值以剔除更多冗余框;而在物体分布密集时,NMS选用大阈值,以获得更高的召回。既然如此,该文提出了密度预测模块,来学习一个框的密度。
一个GT框 B_i 的密度标签定义如下,
d_i:=\max\limits_{B_i,B_j\in GT}IoU(B_i,B_j), \quad i\neq j
模型的输出将变为 (x,y,w,h,s,d) ,分别代表box坐标,宽高,分类得分,密度,其中密度 d 越大,代表该框所处的位置的物体分布越密集,越有可能是遮挡严重的地方;反之密度 d 越小,代表该框所处的位置的物体分布越稀疏,不太可能有遮挡。
论文以Traditionnal NMS和Soft-NMS的线性惩罚为基础,将每次迭代的NMS阈值更改如下:
N t = max { t h r e s h , d M } N_t=\max\{thresh, d_M\} Nt=max{thresh,dM}
其中 thresh 代表最小的NMS阈值。
优点:
- 可以与前面所述的各种NMS结合使用。
- 对遮挡案例更加友好。
缺点:
- 与Soft-NMS结合使用,效果可能倒退 (受低分检测框的影响)。
- 顺序处理模式,运算效率低。
- 需要额外添加密度预测模块,造成计算开销。
- 评判标准是IoU,即只考虑两个框的重叠面积,这对描述box重叠关系或许不够全面。
+中心点距离
DIoU-NMS出现于Distance-IoU一文,研究者认为若相邻框的中心点越靠近当前最大得分框 M 的中心点,则其更有可能是冗余框。也就是说,考虑IoU相同的情况,如下所示
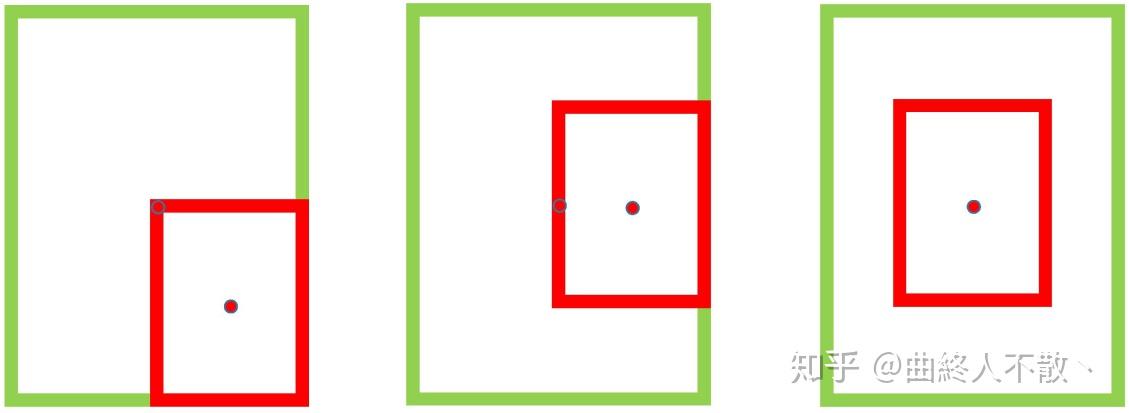
第一种相比于第三种越不太可能是冗余框。基于该观点,研究者使用所提出的DIoU替代IoU作为NMS的评判准则,公式如下:
s i = { 0 , D I o U ( M , B i ) ⩾ t h r e s h s i , D I o U ( M , B i ) < t h r e s h s_i=\left\{ \begin{array}{lc} 0, & DIoU(M,B_i)\geqslant thresh\\ s_i, & DIoU(M,B_i)<thresh\\ \end{array}\right. si={0,si,DIoU(M,Bi)⩾threshDIoU(M,Bi)<thresh
DIoU的定义为
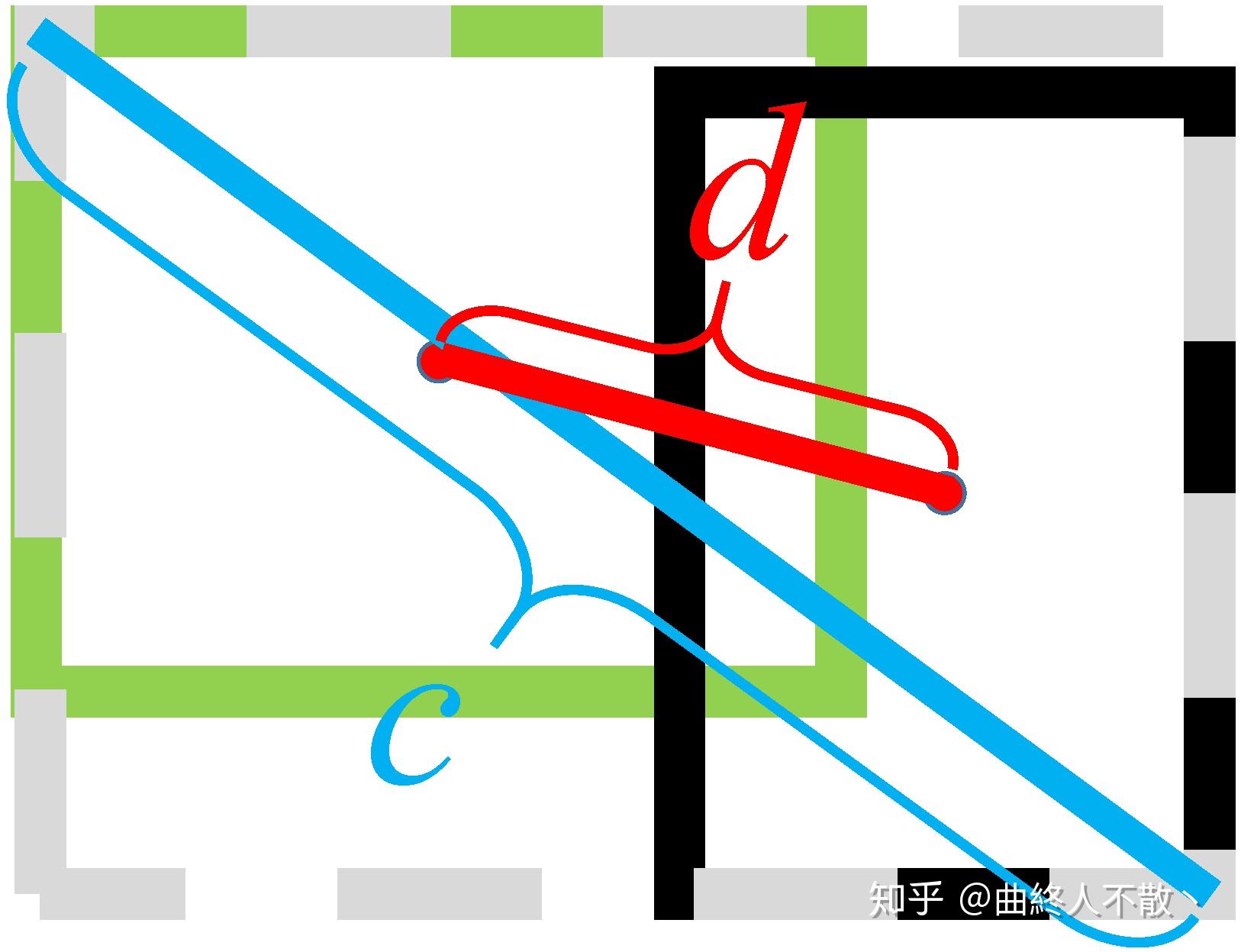
D I o U = I o U − d ² / c ² DIoU=IoU-d²/c² DIoU=IoU−d²/c²
而在实际操作中,研究者还引入了参数 \beta ,用于控制 \frac{d2}{c2} 的惩罚幅度。即
D I o U = I o U − ( d 2 c 2 ) β DIoU=IoU-(\frac{d^2}{c^2})^\beta DIoU=IoU−(c2d2)β
由公式可以看出,
- 当 β → ∞ \beta\rightarrow\infty β→∞ 时,DIoU退化为IoU,此时的DIoU-NMS与Traditional NMS效果相当。
- 当 β → 0 \beta\rightarrow0 β→0 时,此时几乎所有中心点不与 M 重合的框都被保留了。
研究者进一步比较了Traditional NMS和DIoU-NMS的性能,在YOLOv3和SSD上,选取NMS阈值为[0.43,0.48]。可以看到DIoU-NMS在每个阈值上都优于Traditional NMS,此外还值得一提的是,即便是性能最差的DIoU-NMS也比性能最好的Traditional NMS相当或更优,说明即便不仔细调整NMS阈值,DIoU-NMS也通常能够表现更好。
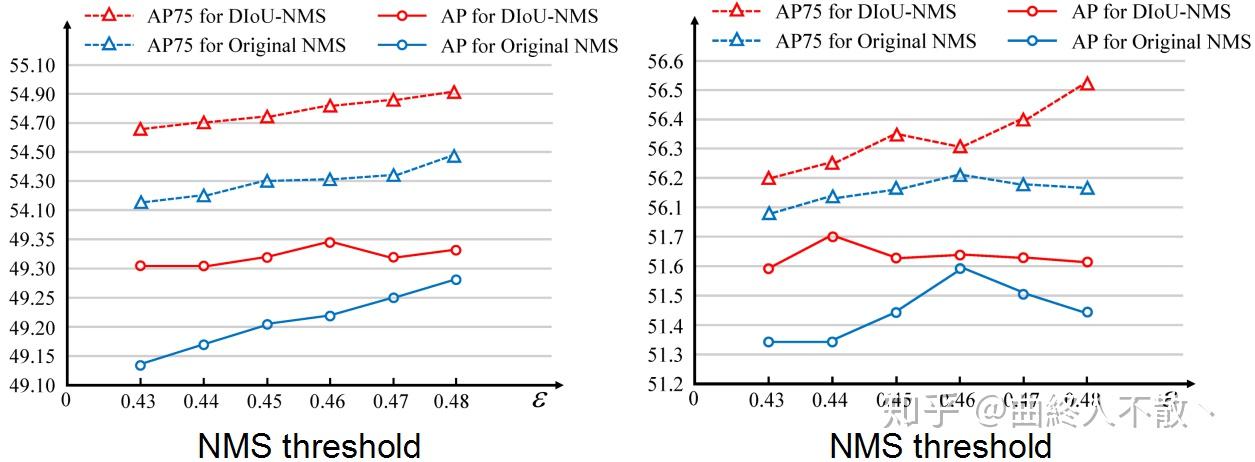
YOLOv3(左)和SSD(右)在VOC 2007 test集
这里顺便一提,既然都比了[0.43, 0.48]的阈值,就让人比较好奇更宽的阈值范围会怎样?Traditional NMS会不会有反超DIoU-NMS的情况?当然我个人比较认同DIoU-NMS更优的范围会大一些,也就是NMS阈值不必精调也可放心使用DIoU-NMS。
优点:
- 从几何直观的角度,将中心点考虑进来有助于缓解遮挡案例。
- 可以与前述NMS变体结合使用。
- 保持NMS阈值不变的情况下,必然能够获得更高recall (因为保留的框增多了),至于precision就需要调 \beta 来平衡了。
- 个人认为+中心点距离的后处理可以与DIoU/CIoU损失结合使用,这两个损失一方面优化IoU,一方面指引中心点的学习,而中心点距离学得越好,应该对这种后处理思想的执行越有利。
缺点:
- 依然是顺序处理模式,运算效率低。
- DIoU的计算比IoU更复杂一些,这会降低运算效率。
- 在保持NMS阈值不变的情况下,使用DIoU-NMS会导致每次迭代剩余更多的框,这会增加迭代轮数,进一步降低运算效率。(经本人实测,DIoU-NMS是Traditional NMS 起码1.5倍耗时)
总结:
- 加权平均法通常能够稳定获得精度与召回的提升。
- 定位优先法,方差加权平均法与自适应阈值法需要修改模型,不够灵活。
- 中心点距离法可作为额外惩罚因子与其他NMS变体结合。
- 得分惩罚法会改变box的得分,打破了模型校准机制。
- 运算效率的低下可能会限制它们的实时应用性。
效率提升
实际项目中,NMS往往能占模型计算总时间的40%甚至更多,极大影响了模型的效率。经过一段时间的调研,关于提升NMS运算速度的方法,在这里也将结合代码进行阶段性总结。
所参考的代码库列举如下:
- Faster RCNN pytorch (rbg大神) 的 CUDA NMS https://github.com/rbgirshick/py-faster-rcnn
- YOLACT团队提出的Fast NMS https://github.com/dbolya/yolact
- CIoU团队提出的Cluster NMS https://github.com/Zzh-tju/CIoU
- SOLOv2团队提出的Matrix NMS https://github.com/WXinlong/SOLO
- Torchvision封装的免编译CUDA NMS
加速的关键
在进入正题之前,首先我们应该考察一下NMS运算效率的瓶颈在哪?答案自然是IoU计算及顺序迭代抑制。
假如一张图片中有 n 个检测框,由于顺序处理的原因,某一个框与其他框计算IoU,最少一次,最多有 n-1 次。再加上顺序迭代抑制,NMS算法在计算IoU方面,共需要计算IoU至少 n-1 次,最多 ( n − 1 ) + ( n − 2 ) + ⋯ + 1 = 1 2 n 2 − n 2 (n-1)+(n-2)+\cdots+1=\frac{1}{2}n^2-\frac{n}{2} (n−1)+(n−2)+⋯+1=21n2−2n 次。
因此,要想加速NMS,首当其冲应该要将IoU的计算并行化。这个操作在我们使用IoU-based loss的时候就有,只需计算检测框集合 B={B_i}_{i=1,to,n} 与自身的IoU即可。检测框集合 B 事先会按照得分降序排列,也就是说 B_1 是最高得分框, B_n 是最低得分框。得到如下这个IoU矩阵:
X = I o U ( B , B ) = ( x 11 x 12 ⋯ x 1 n x 21 x 22 ⋯ x 2 n ⋮ ⋮ ⋱ ⋮ x n 1 x n 2 ⋯ x n n ) , x i j = I o U ( B i , B j ) X=IoU(B,B)=\left(\begin{array}{cccc} x_{11}&x_{12}&\cdots&x_{1n}\\ x_{21}&x_{22}&\cdots&x_{2n}\\ \vdots&\vdots&\ddots&\vdots\\ x_{n1}&x_{n2}&\cdots&x_{nn}\\ \end{array}\right),\quad x_{ij}=IoU(B_i, B_j) X=IoU(B,B)=⎝⎜⎜⎜⎛x11x21⋮xn1x12x22⋮xn2⋯⋯⋱⋯x1nx2n⋮xnn⎠⎟⎟⎟⎞,xij=IoU(Bi,Bj)
得益于GPU的并行计算,我们可以一次性得到IoU的全部计算结果。这一步就已经极大地解决了IoU计算繁琐又耗时的问题。代码如下:
def box_iou(boxes1, boxes2):
# https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
"""
Return intersection-over-union (Jaccard index) of boxes.
Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
Arguments:
boxes1 (Tensor[N, 4])
boxes2 (Tensor[M, 4])
Returns:
iou (Tensor[N, M]): the NxM matrix containing the pairwise
IoU values for every element in boxes1 and boxes2
"""
def box_area(box):
# box = 4xn
return (box[2] - box[0]) * (box[3] - box[1])
area1 = box_area(boxes1.t())
area2 = box_area(boxes2.t())
lt = torch.max(boxes1[:, None, :2], boxes2[:, :2]) # [N,M,2]
rb = torch.min(boxes1[:, None, 2:], boxes2[:, 2:]) # [N,M,2]
inter = (rb - lt).clamp(min=0).prod(2) # [N,M]
return inter / (area1[:, None] + area2 - inter) # iou = inter / (area1 + area2 - inter)
到这里为止,以上列出的5种NMS都可以做到,从速度上来说CUDA NMS和torchvision NMS相对底层,编译后使用,速度稍快,但必然损失了一些灵活度,后面会讲。(关于CUDA NMS的教程,有兴趣的小伙伴可以参考faster-rcnn源码阅读:nms的CUDA编程,非常详实。
在有了IoU矩阵之后,接下来就是应该要如何利用它来抑制冗余框。
IoU矩阵的妙用
以下列举的三篇文献,可谓是将IoU矩阵玩出了花,从不同的角度发扬光大,在NMS加速方面也确实走在正轨上。(所用的一些符号,笔者进行了统一)
Fast NMS
Fast NMS是《YOLACT: Real-time Instance Segmentation》一文的其中一个创新点。由于IoU的对称性,即 IoU(B_i,B_j)=IoU(B_j,B_i) ,看出 X 是一个对称矩阵。再加上一个框自己与自己算IoU也是无意义的,因此Fast NMS首先对 X 使用pytorch的triu函数进行上三角化,得到了一个对角线元素及下三角元素都为0的IoU矩阵 X 。
X = ( 0 x 12 x 13 ⋯ x 1 n 0 0 x 23 ⋯ x 2 n 0 0 0 ⋯ x 3 n ⋮ ⋮ ⋮ ⋱ ⋮ 0 0 0 ⋯ 0 ) X=\left(\begin{array}{ccccc} 0&x_{12}&x_{13}&\cdots&x_{1n}\\ 0&0&x_{23}&\cdots&x_{2n}\\ 0&0&0&\cdots&x_{3n}\\ \vdots&\vdots&\vdots&\ddots&\vdots\\ 0&0&0&\cdots&0\\ \end{array}\right) X=⎝⎜⎜⎜⎜⎜⎛000⋮0x1200⋮0x13x230⋮0⋯⋯⋯⋱⋯x1nx2nx3n⋮0⎠⎟⎟⎟⎟⎟⎞
接着对 X 执行按列取最大值操作,得到一维张量 $b=[b_1,b_2,\cdots,b_n], b_i $代表了 X 的第 i 列上元素的最大值。最后使用NMS阈值,论文取0.5,对 b 二值化。 b 中元素小于NMS阈值的是保留的框,≥NMS阈值的是冗余框。例如
1 0 1 0 0 ↑ N M S 阈 值 二 值 化 b = 0 0.6 0.2 0.72 0.8 ↑ 列 最 大 值 X = ( 0 0.6 0.1 0.3 0.8 0 0.2 0.72 0.1 0 0.45 0.12 0 0.28 0 ) \begin{array}{cccccc} &\;\;1\;\quad\;0\;\;\;\quad1\;\;\;\quad0\;\;\;\quad0\;\;\;\;\;\\ &\quad\quad\quad\quad\;\;\quad\quad\quad\quad\uparrow\;NMS阈值二值化\quad\\ b=&0\quad0.6\quad0.2\quad0.72\quad\,0.8\;\\ &\quad\quad\quad\quad\quad\uparrow\;列最大值\quad\\ X=&\left(\begin{array}{ccccc} 0&0.6&0.1&0.3&0.8\\ &0&0.2&0.72&0.1\\ &&0&0.45&0.12\\ &&&0&0.28\\ &&&&0\\ \end{array}\right)\end{array} b=X=10100↑NMS阈值二值化00.60.20.720.8↑列最大值⎝⎜⎜⎜⎜⎛00.600.10.200.30.720.4500.80.10.120.280⎠⎟⎟⎟⎟⎞
1代表保留,0代表抑制。
代码如下:
def fast_nms(self, boxes, scores, NMS_threshold:float=0.5):
'''
Arguments:
boxes (Tensor[N, 4])
scores (Tensor[N, 1])
Returns:
Fast NMS results
'''
scores, idx = scores.sort(1, descending=True)
boxes = boxes[idx] # 对框按得分降序排列
iou = box_iou(boxes, boxes) # IoU矩阵
iou.triu_(diagonal=1) # 上三角化
keep = iou.max(dim=0)[0] < NMS_threshold # 列最大值向量,二值化
return boxes[keep], scores[keep]
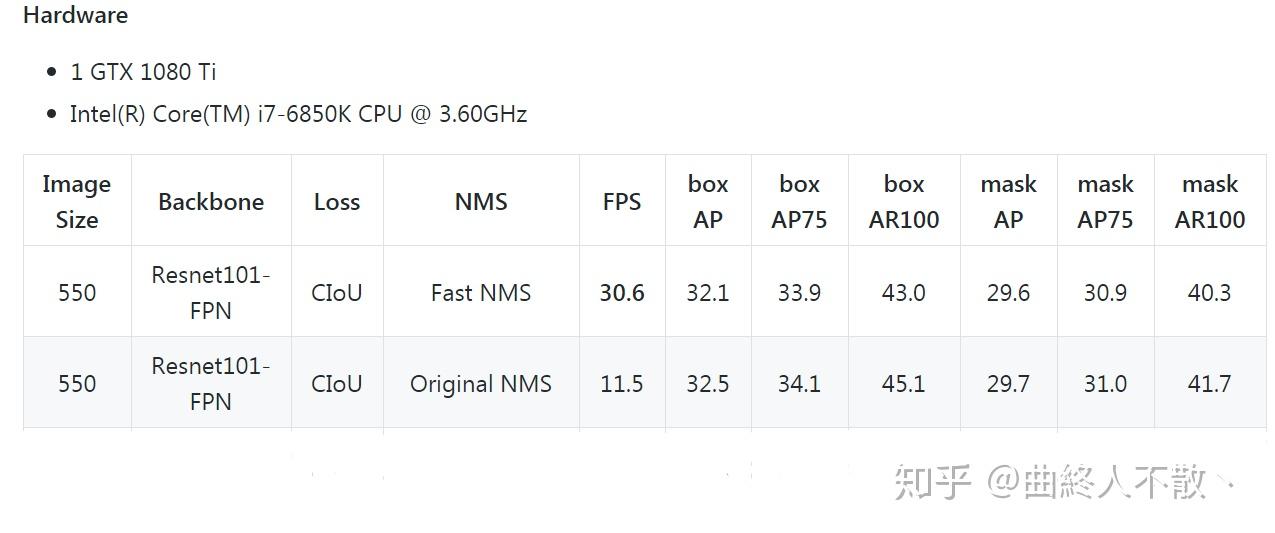
优点:
- 速度比cython编译加速的Traditional NMS快。(上表截自https://github.com/Zzh-tju/CIoU)
- 可支持与其他提升精度的NMS方法结合。
缺点:
- Fast NMS会比Traditional NMS抑制更多的框,性能略微下降。
- 比CUDA NMS慢,约0.2ms。
这里有必要解释一下,为什么Fast NMS会抑制更多的框?
我们知道NMS的思想是:当一个框是冗余框,被抑制后,将不会对其他框产生任何影响。但在Fast NMS中,如果一个框 B_i 的得分比 B_j 高,且 B_i 被抑制了,矩阵 X 的第 i 行正是 B_i 与得分低于它的所有框的IoU,如果 x_{ij} 这个元素≥NMS阈值的话,那么在取列最大值这个操作时, b 的第 j 个元素必然≥NMS阈值,于是很不幸地 B_j 就被抑制掉了。
也就是在刚刚的例子中,由于第二个框 B_2 被抑制,那么第二行第四列的0.72就不应该存在,可是Fast NMS允许冗余框去抑制其他框,导致了第四个框 B_4 被错误地抑制了。
1 0 1 0 0 ↑ N M S 阈 值 二 值 化 b = 0 0.6 0.2 0.72 0.8 ↑ 列 最 大 值 X = ( 0 0.6 0.1 0.3 0.8 0 0.2 0.72 0.1 0 0.45 0.12 0 0.28 0 ) \begin{array}{cccccc} &\;\;1\;\quad\;0\;\;\;\quad1\;\;\;\quad0\;\;\;\quad0\;\;\;\;\;\\ &\quad\quad\quad\quad\;\;\quad\quad\quad\quad\uparrow\;NMS阈值二值化\quad\\ b=&0\quad0.6\quad0.2\quad0.72\quad\,0.8\;\\ &\quad\quad\quad\quad\quad\uparrow\;列最大值\quad\\ X=&\left(\begin{array}{ccccc} 0&0.6&0.1&0.3&0.8\\ &0&0.2&0.72&0.1\\ &&0&0.45&0.12\\ &&&0&0.28\\ &&&&0\\ \end{array}\right)\end{array} b=X=10100↑NMS阈值二值化00.60.20.720.8↑列最大值⎝⎜⎜⎜⎜⎛00.600.10.200.30.720.4500.80.10.120.280⎠⎟⎟⎟⎟⎞
不过呢,YOLACT主要针对的是实例分割,mask是从box中裁剪出来的,Fast NMS对mask AP的下降比较轻微,约0.1~0.3的AP,但似乎对目标检测的box AP会下降更多。
Cluster NMS
Cluster NMS出自《Enhancing Geometric Factors in Model Learning and Inference for Object Detection and Instance Segmentation》一文。研究者主要旨在弥补Fast NMS的性能下降,期望也利用pytorch的GPU矩阵运算进行NMS,但同时又使得性能保持与Traditional NMS相同。
最开始看到这个名字时,笔者还以为是采取聚类的NMS,这不禁让人想起了今年2月的FeatureNMS。但后来仔细看了过后,发现这里的cluster的含义不一样。

以上是论文的原话,意思是说,cluster是一个框集合,若某一个框A属于这个cluster,则必有cluster中的框与A的IoU≥NMS阈值,且A不会与除这个cluster之外的框有IoU≥NMS阈值。举个简单的例子:
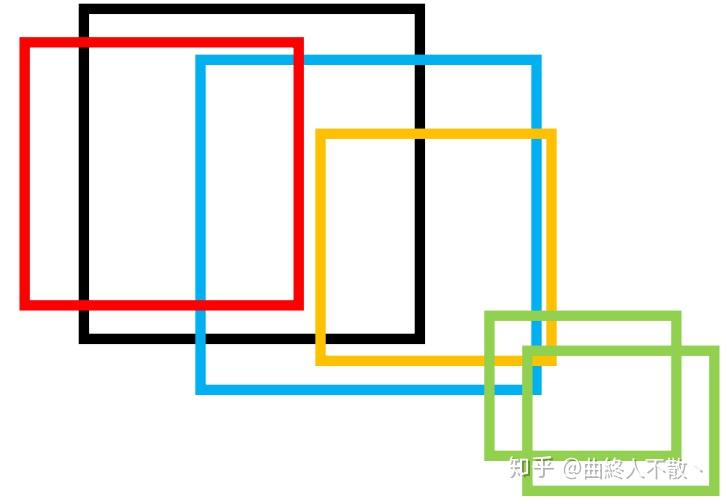
上图中的黑红蓝橙四个框构成一个cluster,而绿色的两个框构成一个cluster,虽然两个cluster之间有相交,但都没有超过NMS阈值,于是这两个框集合不能合并成一个cluster。
然后我们看一下Cluster NMS是怎么做的?
其实就是一个迭代式的Fast NMS。前面的过程与Fast NMS一模一样,都是 B 按得分降序排列,计算IoU矩阵,上三角化。然后按列取最大值,经过NMS阈值二值化得到一维张量 b 。但不同于Fast NMS直接输出了 b ,Cluster NMS而是利用 b ,将它展开成一个对角矩阵 E 。也就是这个对角矩阵 E 的对角线元素与 b 相同。然后用 E 去左乘IoU矩阵 X 。然后再按列取最大值,NMS阈值二值化得到一个新的一维张量 b,再展开成一个新的对角矩阵 E,继续左乘IoU矩阵 X 。直到出现某两次迭代后, b 保持不变了,那么谁该保留谁该抑制也就确定了。
这里借用一下作者在github的流程图。


以笔者的角度看,这种利用矩阵左乘的方式,其实就是在省略上一次Fast NMS迭代中被抑制的框对其他框的影响。
因为我们知道一个对角矩阵左乘一个矩阵,就是在做行变换啊,对应行是1,乘完的结果这一行保持不变,如果对应行是0,乘完的结果就是把这一行全部变成0。而 b 中某个元素若是0,就代表这个位置是冗余框,于是乘完之后,这个冗余框在下一次的迭代中就不再对其他框产生影响。为什么这里要强调下一次迭代?是因为这个迭代过程 b 会不断发生变动!可能某个框这会儿是冗余框,到了下一次迭代又变成了保留框。但是但是!到了最终 (其实未必是迭代满n次), b 就保持不变了!你说奇怪不?这里论文还给出了一个命题,说Cluster NMS的输出结果与Traditional NMS的结果一模一样。
论文里还给出了对这个命题的证明,又是数学数学数学!大致一看是利用数学归纳法证的,感兴趣的可以去看论文,这里请允许我跳过。
def cluster_nms(self, boxes, scores, NMS_threshold:float=0.5):
'''
Arguments:
boxes (Tensor[N, 4])
scores (Tensor[N, 1])
Returns:
Fast NMS results
'''
scores, idx = scores.sort(1, descending=True)
boxes = boxes[idx] # 对框按得分降序排列
iou = box_iou(boxes, boxes).triu_(diagonal=1) # IoU矩阵,上三角化
C = iou
for i in range(200):
A=C
maxA = A.max(dim=0)[0] # 列最大值向量
E = (maxA < NMS_threshold).float().unsqueeze(1).expand_as(A) # 对角矩阵E的替代
C = iou.mul(E) # 按元素相乘
if A.equal(C)==True: # 终止条件
break
keep = maxA < NMS_threshold # 列最大值向量,二值化
return boxes[keep], scores[keep]
好了,至此Cluster NMS算是完成了对Fast NMS性能下降的弥补。我们直接看结果好了
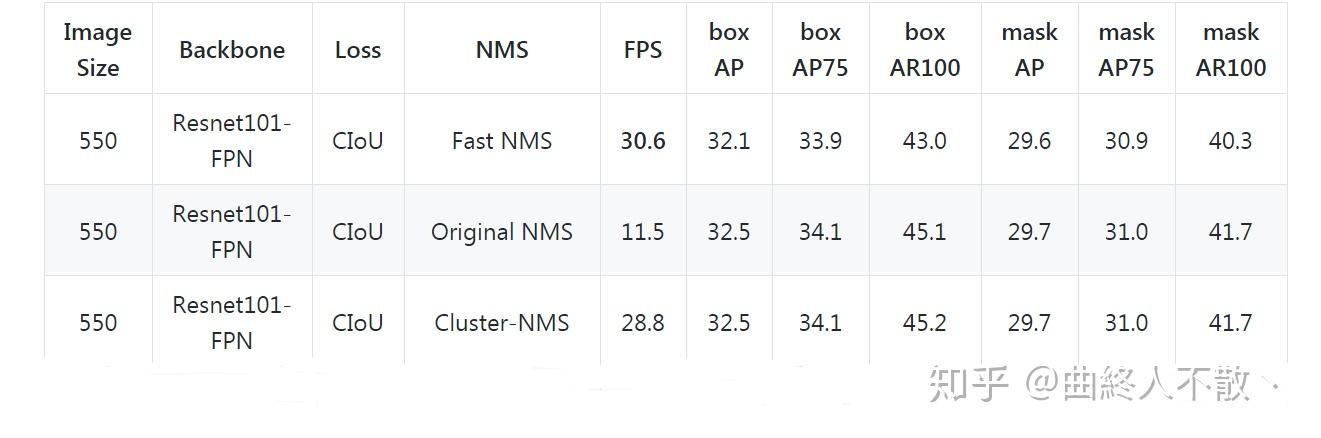
嗯,效果还是可以的,保持了AP与AR一样,运算效率比Fast NMS下降了一些,毕竟是迭代Fast NMS的操作,但也比Traditional NMS快多了。
以为这样就完了?接下来才是重头戏!
这里又分为两个部分,一个是实用上的,另一个是理论上的。先说一下实用上的。
之前说过基于pytorch的NMS方法灵活度要比CUDA NMS更高,就在于这些基于pytorch的NMS是高层语言编写,专为研究人员开发,矩阵运算清晰简洁,于是乎可以很方便地与一些能够提升精度的NMS方法结合!正所谓强强联合,于是就诞生出了又快又好的一系列Cluster NMS的变体。
论文里主要举了三种变体:
- 得分惩罚机制SPM(Score Penalty Mechanism)
s j = s j ∏ i e − C i j 2 σ s_j=s_j\prod\limits_ie^{-\frac{C_{ij}^2}{\sigma}} sj=sji∏e−σCij2
也就是对刚刚Cluster NMS终止后的矩阵 C=E\times X ,先做一个Soft-NMS里gaussian版的变换,然后将每一列上的元素连乘作为惩罚得分的系数。不过论文提到,虽然是叫得分惩罚机制,但又与Soft-NMS不同,因为这里的SPM不改变框的次序,再加上矩阵 C 是一个上三角矩阵的缘故,所以每个框都只会被得分高于它的框惩罚,并且这里已经排除了高得分的冗余框对它的惩罚。而Soft-NMS每次迭代惩罚得分后,需要重新按得分降序排列,所以框的次序会不断变动。
def SPM_cluster_nms(self, boxes, scores, NMS_threshold:float=0.5):
'''
Arguments:
boxes (Tensor[N, 4])
scores (Tensor[N, 1])
Returns:
Fast NMS results
'''
scores, idx = scores.sort(1, descending=True)
boxes = boxes[idx] # 对框按得分降序排列
iou = box_iou(boxes, boxes).triu_(diagonal=1) # IoU矩阵,上三角化
C = iou
for i in range(200):
A=C
maxA = A.max(dim=0)[0] # 列最大值向量
E = (maxA < NMS_threshold).float().unsqueeze(1).expand_as(A) # 对角矩阵E的替代
C = iou.mul(E) # 按元素相乘
if A.equal(C)==True: # 终止条件
break
scores = torch.prod(torch.exp(-C**2/0.2),0)*scores #惩罚得分
keep = scores > 0.01 #得分阈值筛选
return boxes[keep], scores[keep]
- +中心点距离
说到底DIoU就是该团队提出来的,那怎能不用上中心点距离呢?于是论文在两个方面添加了中心点距离。一个是IoU矩阵直接变成DIoU矩阵,由于DIoU也是满足尺度不变性的,所以完全没问题,相距很远的框之间的DIoU会变成负数,不过不影响过程。第二个是基于上面的SPM,公式如下:
s j = s j ∏ i min { e − C i j 2 σ + D β , 1 } s_j=s_j\prod\limits_i\min\{e^{-\frac{C_{ij}^2}{\sigma}}+D^\beta,1\} sj=sji∏min{e−σCij2+Dβ,1}
这里多添了一个 D 也就是DIoU loss的惩罚项,两框中心点距离²/最小包围矩形对角线长度²。 \beta 用于控制中心点距离惩罚的幅度。然后又与1相比较,取最小值,以避免惩罚因子大于1。
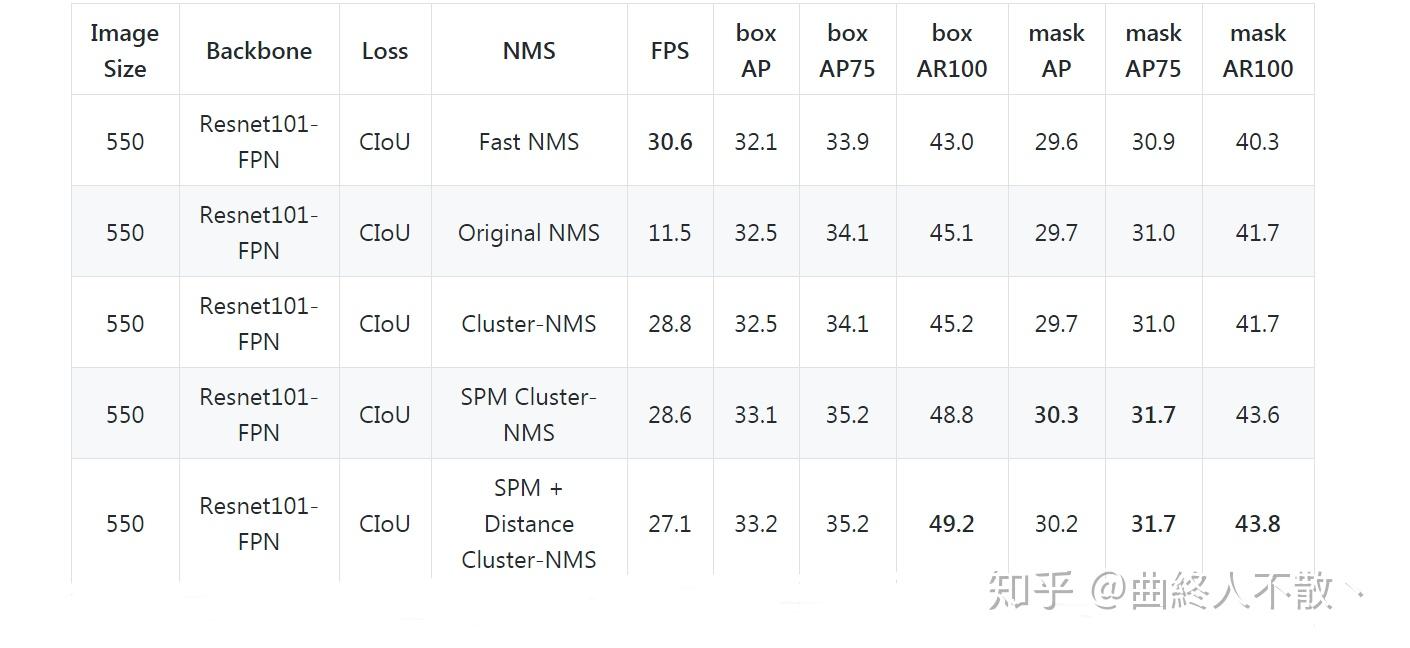
加了这两个变体之后,AP与AR得到了明显的改善,速度也是略微下降,很香
- 加权平均法Weighted NMS
也是利用矩阵 C ,先与得分张量 S = [ s 1 , s 2 , ⋯ , s n ] S=[s_1,s_2,\cdots,s_n] S=[s1,s2,⋯,sn] 按列相乘得到 C’ ,随后
B = C ′ × B B=C'\times B B=C′×B
就可以更新框的坐标了。
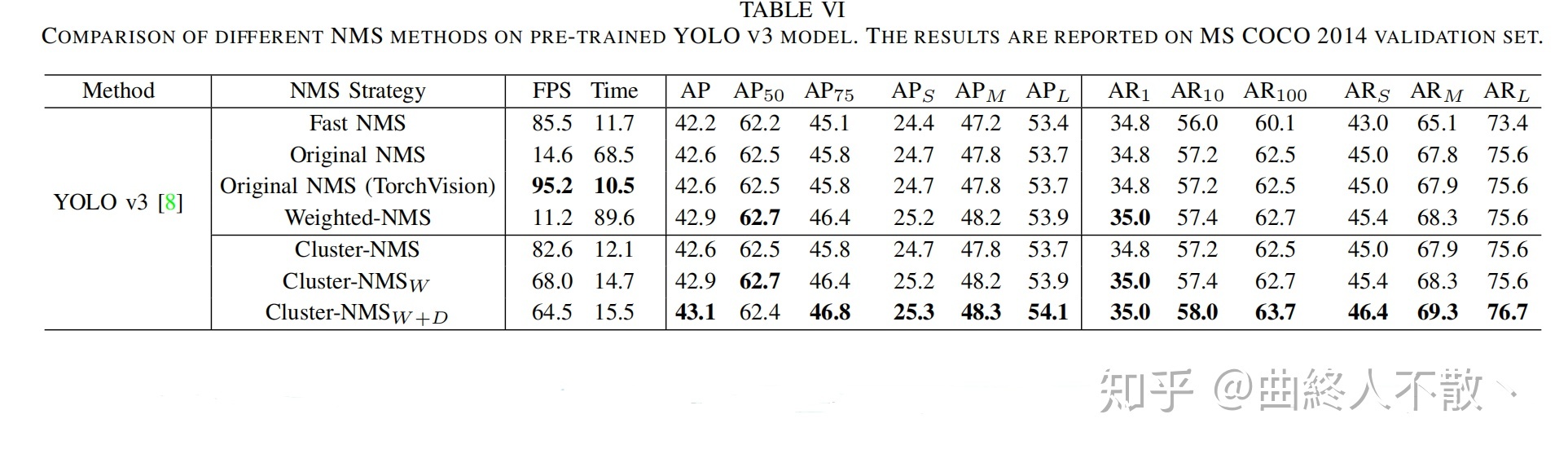
在YOLOv3上的效果有了不错的改进,虽然速度不及torchvision NMS,增加了5ms的运算成本,但结合Weighted NMS与DIoU,可以提升精度 (最后一行)。
def Weighted_cluster_nms(self, boxes, scores, NMS_threshold:float=0.5):
'''
Arguments:
boxes (Tensor[N, 4])
scores (Tensor[N, 1])
Returns:
Fast NMS results
'''
scores, idx = scores.sort(1, descending=True)
boxes = boxes[idx] # 对框按得分降序排列
iou = box_iou(boxes, boxes).triu_(diagonal=1) # IoU矩阵,上三角化
C = iou
for i in range(200):
A=C
maxA = A.max(dim=0)[0] # 列最大值向量
E = (maxA < NMS_threshold).float().unsqueeze(1).expand_as(A) # 对角矩阵E的替代
C = iou.mul(E) # 按元素相乘
if A.equal(C)==True: # 终止条件
break
keep = maxA < NMS_threshold # 列最大值向量,二值化
weights = (C*(C>NMS_threshold).float() + torch.eye(n).cuda()) * (scores.reshape((1,n)))
xx1 = boxes[:,0].expand(n,n)
yy1 = boxes[:,1].expand(n,n)
xx2 = boxes[:,2].expand(n,n)
yy2 = boxes[:,3].expand(n,n)
weightsum=weights.sum(dim=1) # 坐标加权平均
xx1 = (xx1*weights).sum(dim=1)/(weightsum)
yy1 = (yy1*weights).sum(dim=1)/(weightsum)
xx2 = (xx2*weights).sum(dim=1)/(weightsum)
yy2 = (yy2*weights).sum(dim=1)/(weightsum)
boxes = torch.stack([xx1, yy1, xx2, yy2], 1)
return boxes[keep], scores[keep]
接下来说一下Cluster NMS理论上的好处。
Cluster NMS的迭代次数通常少于Traditional NMS的迭代次数。
这一优点,从理论上给了它使用CUDA编程更进一步加速的可能。大致意思是说,平常我们在做NMS时,迭代都是顺序处理每一个cluster的。在Traditional NMS中,虽然不同的cluster之间本应毫无关系,但计算IoU重复计算了属于不同cluster之间的框,顺序迭代抑制的迭代次数也仍然保持不变。
但在Cluster NMS中,使用这种行变换的方式,就可以将本应在所有cluster上迭代,化简为只需在一个拥有框数量最多的cluster上迭代就够了(妙啊)。不同的cluster间享有相同的矩阵操作,且它们互不影响。这导致迭代次数最多不超过一张图中最大cluster所拥有的框的个数。也就是下面这种情形
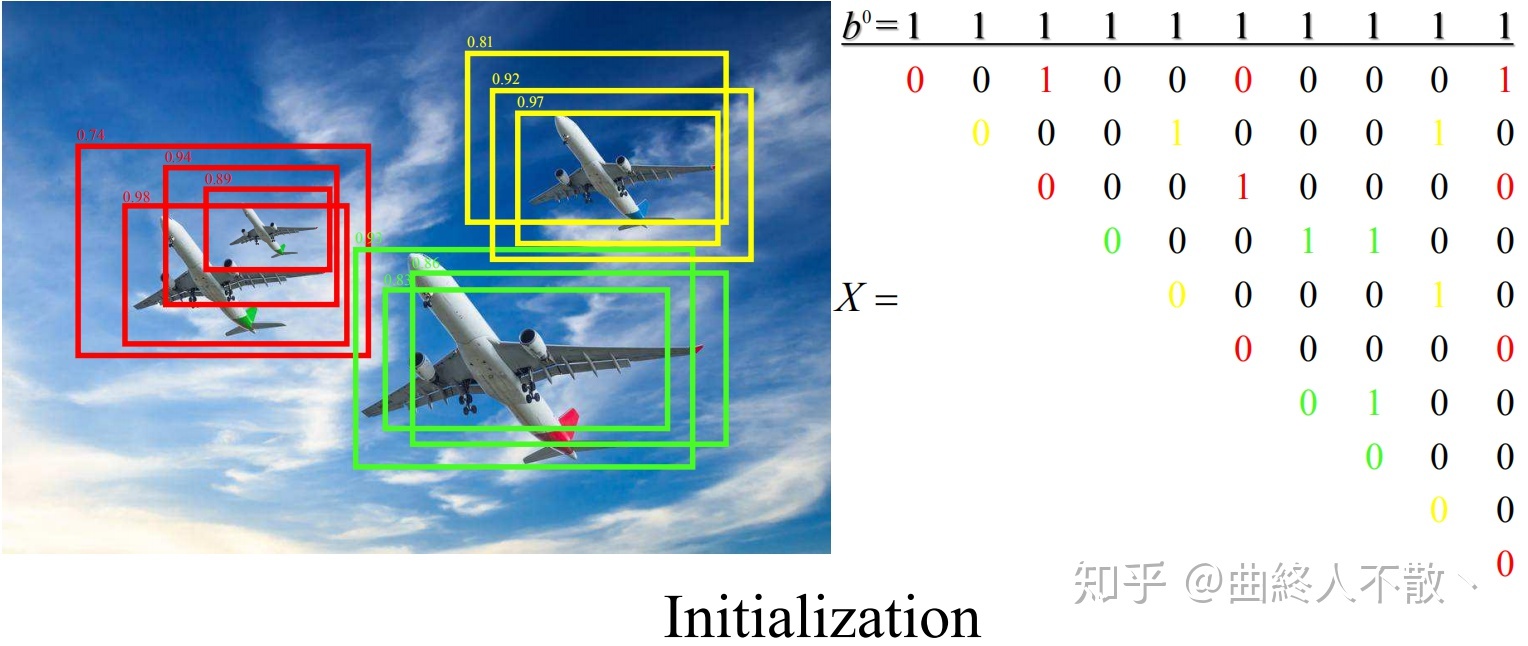
上图中共有10个检测框,分成了3个cluster,它的IoU矩阵(被NMS阈值二值化了)在右边。Cluster NMS做迭代的次数最多不超过4次,因为上图中框数量最多的那个cluster(红色)一共只有4个框。而实际上这张图使用Cluster NMS,只需迭代2轮便结束了。
因此这带来的好处是时间复杂度的下降。特别是对于一张图中有很多个cluster时,效果更为显著。比如这种情形,密密麻麻的狗狗

物体数量越多,到时候的检测框也就越多,形成的cluster必然也会增多,于是乎Cluster NMS这种对所有cluster并行处理的算法必然迭代次数非常少,不会随着物体的增多而过分地增加迭代轮数。最极端的情形是 n 个物体形成 n 个cluster,Traditional NMS需要迭代 \geqslant n 次,而Cluster NMS不与cluster数量有关,只与需要迭代次数最多的那一个cluster有关。这也是为什么文中说,有可能可以被进一步使用工程技巧加速的原因,比如底层CUDA实现。
优点:
- Cluster NMS可以保持与Traditional NMS一样的精度,速度快于Cython编译的Traditional NMS。
- 可以结合一些提升精度的方法,比如得分惩罚法,加权平均法,+中心点距离法。
- 并行处理cluster,给了算法迭代次数一个上界 (最大cluster的框数量)。
缺点:
- 速度上,各种变体Cluster NMS < Cluster NMS < Fast NMS < CUDA NMS
Matrix NMS
Matrix NMS出自《SOLOv2: Dynamic, Faster and Stronger》,也是利用排序过后的上三角化的IoU矩阵。不同在于它针对的是mask IoU。我们知道mask IoU的计算会比box IoU计算更耗时一些,特别是在Traditional NMS中,会加剧运算开销。因此Matrix NMS将mask IoU并行化是它最大的一个贡献。然后论文同样采取了得分惩罚机制来抑制冗余mask。具体代码如下:
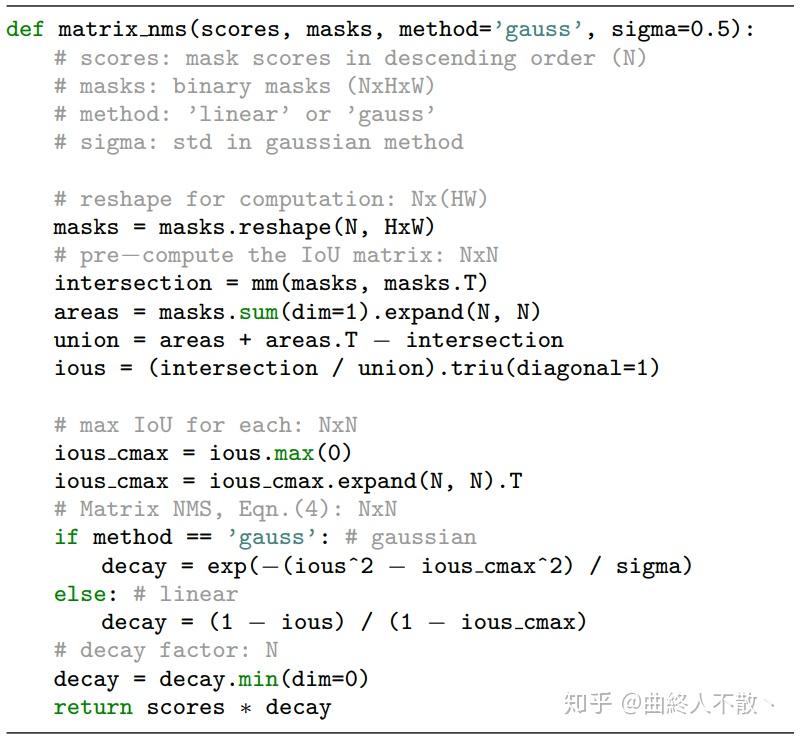
不过笔者在实现这个代码时遇到了问题,惩罚因子decay通常会≥1,在考虑一个mask B_j 的惩罚因子decay时,与两个东西有关,一个是所有得分高于它的mask与Bj的IoU,该IoU越大,惩罚应该更多(也就是上图中decay的分子);另一个是所有得分高于 B_j 的mask B_i 被抑制的概率(也就是上图中decay的分母),这是由 B_i 所处的这一列的最大IoU决定,越大则 B_i 越可能是冗余mask,就应该降低对 B_j 的惩罚力度。
随后decay取列最小值。但依据如上代码,decay通常会≥1,这会增大mask的得分,而代码又以0.05作为score筛选的阈值,说明应该是减少得分的思想没有错,这个矛盾导致得出的结果奇差无比。如有任何人知道Matrix NMS出现这种问题的原因,还请告知我问题在哪。
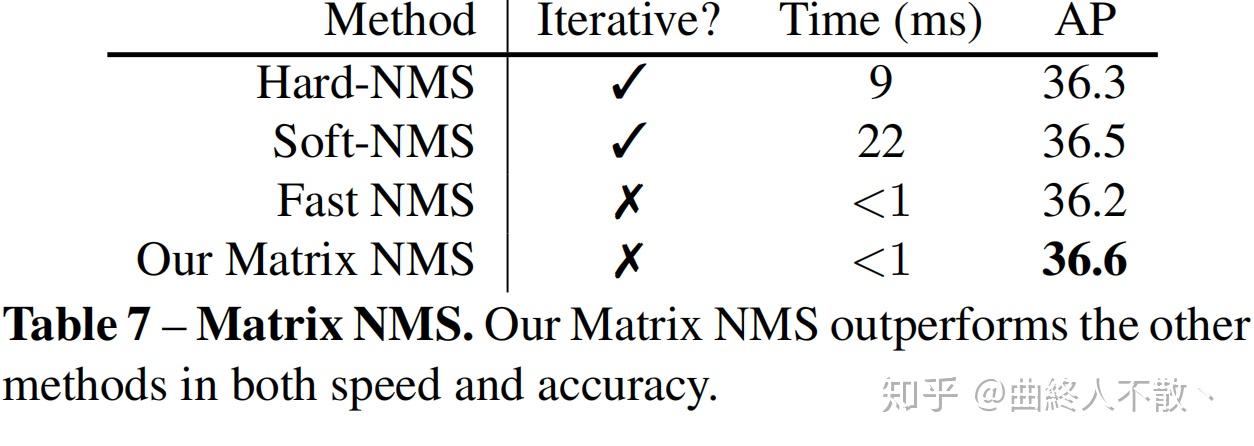
这里直接贴出论文结果,从这里似乎也看出了相比于Soft-NMS每次迭代重排序的做法,直接得分惩罚也是可取的。
优点:
- 实现了mask IoU的并行计算,对于box-free的密集预测实例分割模型很有使用价值。
- 与Fast NMS一样,只需一次迭代。
缺点:
- 与Fast NMS一样,直接从上三角IoU矩阵出发,可能造成过多抑制。
总结:
- CUDA NMS与Torchvision NMS稍快于以上三种基于pytorch实现的NMS,但比较死板,改动不易。
- Cluster NMS基本可以取代Fast NMS,且与其他提升精度的方法的有机结合,使它又快又好。(目前作者团队的代码库只提供了得分惩罚法,+中心点距离,加权平均法三种。)
- Matrix NMS也可以参考Cluster NMS的方式先得到一个与Traditional NMS一样的结果后,再进行后续处理。
- 三种基于pytorch的NMS方法,只依赖于矩阵操作,无需编译。
- 将2D检测的NMS加速方法推广至3D检测,应该也是很有价值的。
人知道Matrix NMS出现这种问题的原因,还请告知我问题在哪。
这里直接贴出论文结果,从这里似乎也看出了相比于Soft-NMS每次迭代重排序的做法,直接得分惩罚也是可取的。
[外链图片转存中…(img-bxfPeLLM-1700568414133)]
优点:
- 实现了mask IoU的并行计算,对于box-free的密集预测实例分割模型很有使用价值。
- 与Fast NMS一样,只需一次迭代。
缺点:
- 与Fast NMS一样,直接从上三角IoU矩阵出发,可能造成过多抑制。
总结:
- CUDA NMS与Torchvision NMS稍快于以上三种基于pytorch实现的NMS,但比较死板,改动不易。
- Cluster NMS基本可以取代Fast NMS,且与其他提升精度的方法的有机结合,使它又快又好。(目前作者团队的代码库只提供了得分惩罚法,+中心点距离,加权平均法三种。)
- Matrix NMS也可以参考Cluster NMS的方式先得到一个与Traditional NMS一样的结果后,再进行后续处理。
- 三种基于pytorch的NMS方法,只依赖于矩阵操作,无需编译。
- 将2D检测的NMS加速方法推广至3D检测,应该也是很有价值的。
推荐阅读:
各部分详情:(持续更新中…)
1. 机器学习
- 机器学习(一) 本文(3万字) | 机器学习概述 |-CSDN博客
- 机器学习(二) 本文(2.5万字) | KNN算法原理及Python复现 |-CSDN博客
- 机器学习(三) 本文(3万字) | 线性回归LR原理 | Python复现 |-CSDN博客
- 机器学习(四) 本文(2万字) | 梯度下降GD原理 | Python复现 |-CSDN博客
2. 深度学习与目标检测
3. YOLOv5
-
YOLOv5系列(一) 本文(1.2万字) | 项目结构 | 罗列全部函数与方法 | 全网最全代码调用关系图 |-CSDN博客
-
YOLOv5系列(二) 本文(1.1万字) | 解析配置文件yolov5s.yaml |_yolov5配置文件中-1可以用其它来代替吗-CSDN博客
-
YOLOv5系列(十二) 本文(1.5万字) | 解析数据增强部分augmentations | 逐行代码注释解析-CSDN博客
-
YOLOv5系列(十三) 本文(2万字) | 解析torch工具部分torch_utils | 逐行代码注释解析-CSDN博客
-
YOLOv5系列(十四) 本文(1.3万字) | 解析数据集处理部分dataloaders | 逐行代码注释解析-CSDN博客
-
YOLOv5系列(二十) 本文(4万字) | 训练自己的数据集 |利用labelimg标注数据集 | 划分自建数据集 | 从环境配置到数据及划分再到训练-CSDN博客
-
YOLOv5系列(二十三) 本文(2.5万字) | 自动混合精度AMP | 指数移动平均EMA | Test Time Augmentation(TTA) |-CSDN博客
-
YOLOv5系列(二十五) 本文(2万字) | 从二值损失基本原理到YOLOv5损失 | Binary Cross-Entropy | YOLOv5 LOSS |-CSDN博客
-
YOLOv5系列(二十七) 本文(2万字) | YOLOv5插值 | | Upsample | UpsamplingBilinear2D | UpsamplingNearest2D |-CSDN博客
-
YOLOv5系列(二十八) 本文(2万字) | 可视化工具 | Comet | ClearML | Wandb | Visdom |-CSDN博客
-
YOLOv5系列(二十九) 本文(1万字) | 多模型推理预测(Model Ensemble) | 参数重结构化(融合Conv+BatchNorm2d) |-CSDN博客
-
YOLOv5系列(三十一) 本文(1.5万字) | 标签平滑(Label Smoothing) | Focal Loss损失函数 | 学习率预热Warmup |-CSDN博客
-
YOLOv5系列(三十二) 本文(2.5万字) | 再次解读yaml文件 | 从yaml到模型结构的具体实施细节 | 魔改模型结构两头 | 四头 | 等 |-CSDN博客
4. YOLOv5改进
-
YOLOv5改进系列(四) 本文(2.5万字) | 更换Neck | BiFPN | AFPN | BiFusion |-CSDN博客
-
YOLOv5改进系列(六) 本文(5万字) | 更换损失函数 | GIoU | DIoU | CIoU | EIoU | AlphaIoU | SIoU | WIoU |-CSDN博客
-
YOLOv5改进系列(十四) 本文(1.2万字) | 更换减轻模型的复杂度同时提升精度GSConv+Slim-neck |-CSDN博客
-
YOLOv5改进系列(十六) 本文(1.2万字) |引入FasterNet | PConv |backbone |-CSDN博客
5. YOLOv8及其改进
6. Python与PyTorch
- Python与Pytorch系列(一) 本文(2万字) | 解析python中的pandas.read_csv() | pandas.read_json() | pandas.read_excel()-CSDN博客
- Python与Pytorch系列(二) 本文(1.8万字) | 解析Opencv, Matplotlib, PIL | 三者之间的转换 | 三者对JPG和PNG读取和写入 |-CSDN博客
- Python与PyTorch系列(三) 本文(4.2万字) | 解读Python中的装饰器 | 复现各种装饰器 | 给出众多实用装饰器 |-CSDN博客
- Python与PyTorch系列(四) 本文(1万字) | 解析python中的魔术方法 |-CSDN博客
- Python与PyTorch系列(五) 本文(5万字) | 解析PyTorch中Hook函数 |-CSDN博客
7. 工具
- Python与PyTorch系列(三) 本文(4.2万字) | 解读Python中的装饰器 | 复现各种装饰器 | 给出众多实用装饰器 |-CSDN博客
- 工具系列(二) 本文(3万字) | 解读在Windows下配置GPU环境(以YOLOv5为例) | 并使用Pytorch训练一个简单的图像分类模型(GPU) |-CSDN博客
- 工具系列(三) 本文(1.5万字) | 解析glob.glob | os.walk |-CSDN博客
- 工具系列(四) 本文(5万字) | pytorch中使用tensorboard进行可视化 | 可视化 | tensorboard |-CSDN博客
8. 小知识点
-
小知识点系列(一) 本文(2.2万字) | 图像变换 | 平移缩放旋转翻错切 | 仿射变换与透视变换 | 代码复现 |-CSDN博客
-
小知识点系列(四) 本文(1万字) | 解析Bounding Box Regression | 边界框回归 |-CSDN博客
-
小知识点系列(五) 本文(5万字) | 解读深度学习中的八种卷积 | pytorch中Conv1d、Conv2d,Conv3d | 空洞卷积 | 转置卷积 | 深度可分离卷积 |-CSDN博客
-
小知识点系列(六) 本文(1.5万字) | 理解深度学习中计算量(FLOPs)和参数量(Params) | 四种计算方法总结 |-CSDN博客















 1620
1620











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









