









文章目录
一、前言
传统方法进行点云分割也有很好的效果,这篇博客是本系列的第三篇,介绍的是发表于2015年CVPR上的CPC算法,CPC原文 。CPC在LCCP的基础上继续深入,LCCP判断邻接超体素之间的凹凸性,将凹边视作无效边,最后沿着凸边对超体素做聚类,再滤除超体素个数少的类,即可实现对物体的分割,效果如下:

第一幅图中的一个个白色正方形可以视作超体素,凸边凹边奇异边也用不同颜色标识了出来,可以看到这个阶梯状的物体在使用LCCP过后,从白色的桌面上被分离出来了。在某些场景下,这种程度的分割已经足够。但试想这样一个场景,在码垛的时候,一堆货物堆放成了如图所示的阶梯状,为了能顺利拆垛,就还需要对这一整个物体做进一步的分割。
可以看到同一物体中的不同部分之间是存在一些凹边的,所以CPC的方法在LCCP的基础上,利用了局部凹性对物体的不同部分做进一步的分割,在一些数据集上取得了很好的效果。

二、方法部分
2.1 Local concavity evidence extraction
首先使用VCCS对点云做预分割,分割的结果是获得一些“补丁”形状的超体素
p
i
⃗
=
(
x
i
⃗
,
n
i
⃗
,
N
i
)
\vec{p_i}=(\vec{x_i}, \vec{n_i}, N_i)
pi=(xi,ni,Ni) ,
x
i
⃗
\vec{x_i}
xi是超体素的质心,
n
i
⃗
\vec{n_i}
ni是法向,
N
i
N_i
Ni是一个集合,包含了当前超体素的邻接边信息。有了邻接图信息之后,使用LCCP来对其中的每条边进行凹凸性判断,判断基于一个非常直观的几何规律。定义超体素质心连线
d
⃗
=
x
1
⃗
−
x
2
⃗
∥
x
1
⃗
−
x
2
⃗
∥
2
\vec{d}=\frac{\vec{x_1}-\vec{x_2}}{\lVert \vec{x_1}-\vec{x_2}\rVert_2}
d=∥x1−x2∥2x1−x2,
α
1
\alpha_1
α1和
α
2
\alpha_2
α2分别是两条法线与质心连线的夹角,定义
α
=
α
1
−
α
2
\alpha=\alpha_1-\alpha_2
α=α1−α2,可以观察到对于凸连接
α
<
0
\alpha<0
α<0,即
(
n
1
⃗
−
n
2
⃗
)
⋅
d
>
0
(\vec{n_1}-\vec{n_2})\cdot d>0
(n1−n2)⋅d>0,凹连接
α
>
0
\alpha>0
α>0。

为了解决一些具体的问题,作者对上述内容进行扩展,提出了两条凸性判断准则——Extended Convexity Criterion(EC)和Sanity criterion(SC),具体内容请回看上一篇博客。
2.2 Semi-global partitioning
2.2.1 Euclidean edge cloud
首先将邻接图转化成Euclidean edge cloud(EEC),在连接两个超体素边的中点位置添加一个点,同时这个点需要保留
d
⃗
\vec{d}
d 和
α
\alpha
α 信息。

2.2.2 Geometrically constrained partitioning
本文的分割方法的核心其实是RANSAC,通过其来找到得分最大的分割模型(本文只考虑平面模型)。经典RANSAC的评分标准是统计距离拟合模型符合阈值的点的个数,迭代结束后具有最多点的模型被视作最终结果。CPC评分标准如下:
S
m
=
1
∣
P
m
∣
∑
i
∈
P
m
ω
i
S_m = \frac{1}{|\mathcal{P}_m|} \sum_{i \in \mathcal{P}_m} \omega_i
Sm=∣Pm∣1i∈Pm∑ωi
其中
P
m
\mathcal{P}_m
Pm是到平面距离小于预设阈值的EEC点集,
ω
i
\omega_i
ωi是每个EEC点的权重,定义如下,
H
\mathcal{H}
H是阶跃函数
ω
(
α
)
=
H
(
α
−
β
thresh
)
\omega(\alpha) = \mathcal{H}(\alpha - \beta_{\text{thresh}})
ω(α)=H(α−βthresh)
经过这个函数,所有凸边的权重都被设置为0。有了这样的评分函数,分割会倾向于在support region中包含更多的凹点,同时又要尽可能少的包含凸点,因为凸点只增加
∣
P
m
∣
|\mathcal{P}_m|
∣Pm∣也会使得评分变低。所以
S
m
\mathcal{S}_m
Sm数值应位于0到1之间,为0时说明整个support region中只包含凸点,为1则全为凹点。
- 文中指出了一种特殊情况,就是分割平面可能只简单地追求更多地凹点,而导致错误地分割,如下图B所示:
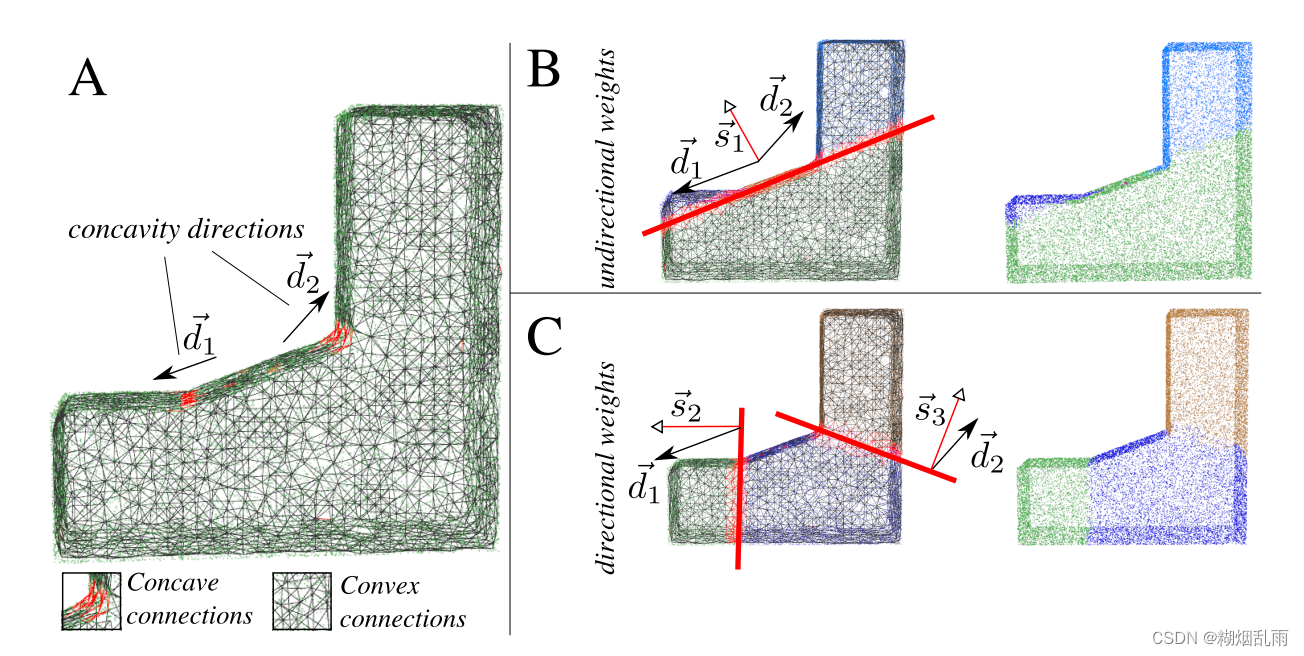
令 s ⃗ m \vec{s}_m sm代表分割平面的法向量, d i ⃗ \vec{d_i} di是第 i i i 个点包含的 d ⃗ \vec{d} d 信息(前文提到过的质心连线),为了找到垂直于 d ⃗ i \vec{d}_i di的分割平面,作者提出了Directional Weighted RANSAC:
S m = 1 ∣ P m ∣ ∑ i ∈ P m ω i t i t i = { ∣ d ⃗ i ⋅ s ⃗ m ∣ i i s c o n c a v e 1 i i s c o n v e x S_m = \frac{1}{|\mathcal{P}_m|} \sum_{i \in \mathcal{P}_m} \omega_i t_i \\t_i = \begin{cases} |\vec{d}_i \cdot \vec{s}_m| & i \ is \ concave \\ 1 & i \ is \ convex \end{cases} Sm=∣Pm∣1i∈Pm∑ωititi={∣di⋅sm∣1i is concavei is convex
使用这个评分函数后,B中的分割模型会获得接近0的分数,而C中的分割模型分数会很高。
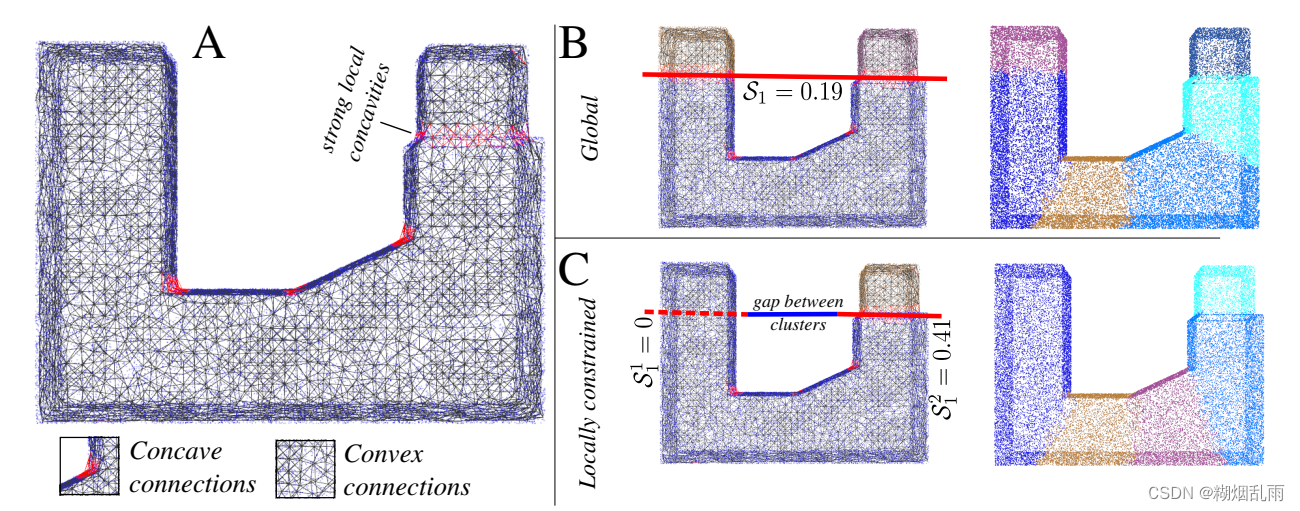
2.2.3 Locally constrained cutting
如果不做特殊处理,一个平面切下去只能把物体分成两部分。有些情况,这种二分切割会出现问题,如下图B所示。所以需要找到一种只切割局部的方法,希望获得下图C中的结果。
作者提出,对于每次分割,都会进行一次欧式聚类。原文中说的“euclidean clustering of all edge-points using a cluster threshold equal to the seed-size of the supervoxels.”,这个seed-size怎么得到呢?我不太清楚。然后对每个聚类单独计算评分,由于太耗时,实际只会对
S
m
\mathcal{S}_m
Sm最高的模型做上述操作。
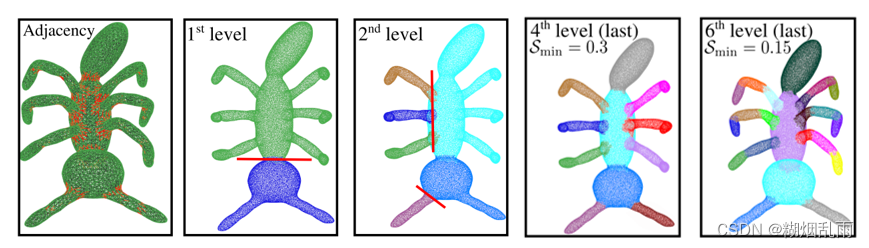
整个分割流程会在新获得的segment上不断重复,直到分数无法超过预设分数阈值
S
m
i
n
\mathcal{S}_{min}
Smin或者所含超体素个数小于
N
m
i
n
N_{min}
Nmin。


















 2762
2762

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











