







 本文档介绍了如何通过PTPD在Ubuntu上进行硬件时间同步,以确保Livox激光雷达的时间戳准确。首先检查网口是否支持硬件时间同步,然后安装并配置PTPD,观察SyncMessage信号确认时钟同步。接着启动激光雷达,并通过上位机或ROS节点验证时间戳同步。如果遇到问题,可尝试官方补丁更新固件。
本文档介绍了如何通过PTPD在Ubuntu上进行硬件时间同步,以确保Livox激光雷达的时间戳准确。首先检查网口是否支持硬件时间同步,然后安装并配置PTPD,观察SyncMessage信号确认时钟同步。接着启动激光雷达,并通过上位机或ROS节点验证时间戳同步。如果遇到问题,可尝试官方补丁更新固件。
官方文档PTP没成功,用ptpd成功了,大致流程。
ifconfig 查看网口 比如网口是 eno1
ethtool -T eno1
如果出现
`hardware-raw-clock (SOF_TIMESTAMPING_RAW_HARDWARE)`
`hardware-transmit (SOF_TIMESTAMPING_TX_HARDWARE)`
`hardware-recive (SOF_TIMESTAMPING_RX_HARDWARE)`
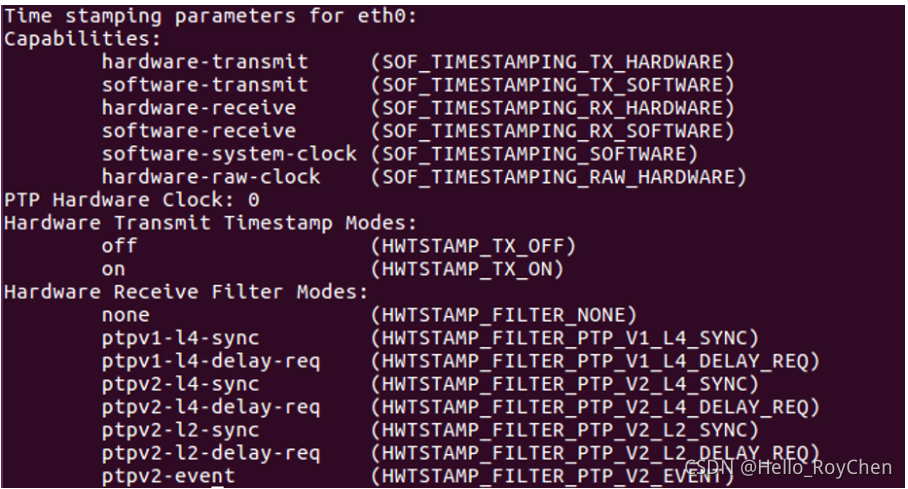
说明可以进行硬件时间同步。
sudo apt install ptpd
sudo ptpd -M -i eno1 -C
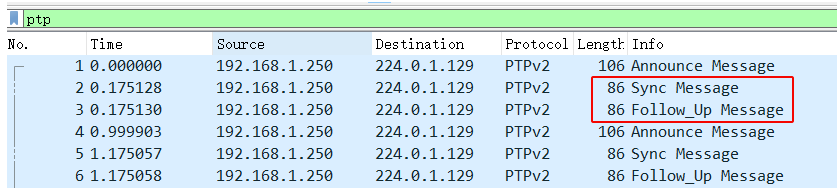
当出现best master的时候,用wireshark确认一下,
wireshark -- eno1-- 搜索框搜索 ptp -- 出现Sync Message信号
说明时钟功能正常运行。
然后启动livox激光雷达即可。
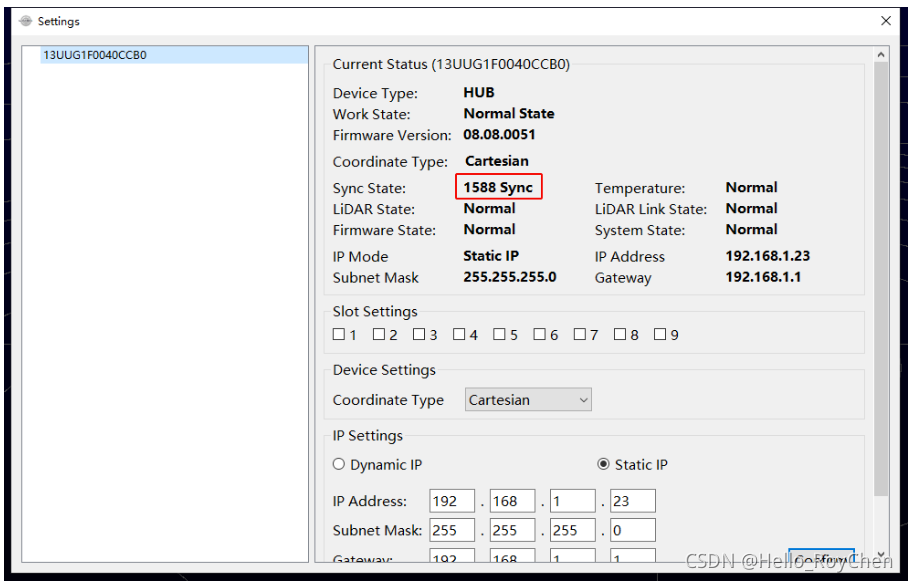
验证时间戳同步的方式有两种,第一种使用上位机查看,在设置中出现1588sync说明同步成功。
第二种方式用ros启动激光雷达节点
比如激光雷达的话题为/livox_lidar
那么输入
rostopic echo /livox_lidar | grep "secs"
查看时间戳信息
与该网站的时间戳作对比,相差不大,说明同步成功。(请确保和网络授时相差不大)
这里补充一下:
如果还是不成功,去官网下载补丁更新固件。
参考:
livox device time synchronization manual cn · Livox-SDK/Livox-SDK Wiki · GitHub
Ubuntu 设置PTP时间同步_u013431916的博客-CSDN博客_ptp时间同步
关于Livox雷达时间同步问题(TIME SYNC)_IKAROS_DAN的博客-CSDN博客_livox时间同步
livox_ros_driver/README_CN.md at master · Livox-SDK/livox_ros_driver · GitHub


















 244
244

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









