






 文章介绍了如何在项目实践中对8个速腾激光雷达(RS80和RSBP)进行软件时间同步,包括使用message_filters库的ApproximateTime策略,以及提供了一个C++代码示例来展示如何订阅和同步不同激光雷达的数据。
文章介绍了如何在项目实践中对8个速腾激光雷达(RS80和RSBP)进行软件时间同步,包括使用message_filters库的ApproximateTime策略,以及提供了一个C++代码示例来展示如何订阅和同步不同激光雷达的数据。
由于项目实践需要,有8个速腾激光雷达(4个rs80和4个rsbp)需要时间同步。
常见的时间同步方式有两种:硬件同步和软件同步,硬件同步有PPS同步和PTP同步,同时在速腾激光雷达技术手册中通常推荐使用GPS的PPS信号进行同步,可参考如下博客和照片
Hesai激光雷达使用PTP时间同步_ptp master-CSDN博客

由于设备已经安装好,故本文采用软件同步,具体步骤如下
1、录制激光雷达bag包,并查看各自扫描频率
rqt_bag <bag_name> 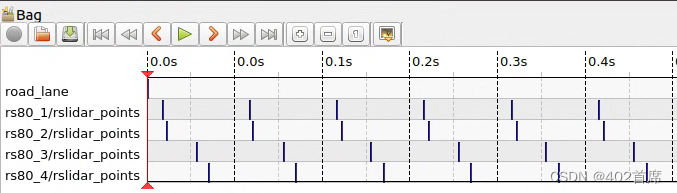
可以很明显的看到各激光雷达的发布频率相差还是很大的
2、写代码
sync.c如下
#include "sync.h"
subscriberANDpublisher::subscriberANDpublisher()
{
// 订阅四个激光雷达话题
lidar1_sub.subscribe(nh, "rs80_1/rslidar_points", 1);
lidar2_sub.subscribe(nh, "rs80_2/rslidar_points2", 1);
lidar3_sub.subscribe(nh, "rs80_3/rslidar_points3", 1);
lidar4_sub.subscribe(nh, "rs80_4/rslidar_points4", 1);
// 消息过滤器,使用 ApproximateTime 进行时间同步
sync_.reset(new message_filters::Synchronizer<syncpolicy>(syncpolicy(10), lidar1_sub, lidar2_sub, lidar3_sub, lidar4_sub));
sync_->registerCallback(boost::bind(&subscriberANDpublisher::callback, this, _1, _2, _3, _4));
// 发布者
lidar1_pub = nh.advertise<sensor_msgs::PointCloud2>("rs80_1/sync", 10);
lidar2_pub = nh.advertise<sensor_msgs::PointCloud2>("rs80_2/sync", 10);
lidar3_pub = nh.advertise<sensor_msgs::PointCloud2>("rs80_3/sync", 10);
lidar4_pub = nh.advertise<sensor_msgs::PointCloud2>("rs80_4/sync", 10);
}
void subscriberANDpublisher::callback(const sensor_msgs::PointCloud2ConstPtr& pc1,
const sensor_msgs::PointCloud2ConstPtr& pc2,
const sensor_msgs::PointCloud2ConstPtr& pc3,
const sensor_msgs::PointCloud2ConstPtr& pc4) {
ROS_INFO("Received synchronized message!");
lidar1_pub.publish(pc1);
lidar2_pub.publish(pc2);
lidar3_pub.publish(pc3);
lidar4_pub.publish(pc4);
}
sync.h如下
#ifndef SUB_AND_PUB_H
#define SUB_AND_PUB_H
#include <ros/ros.h>
#include <message_filters/subscriber.h>
#include <message_filters/sync_policies/approximate_time.h>
#include <message_filters/synchronizer.h>
#include <sensor_msgs/PointCloud2.h>
class subscriberANDpublisher{
public:
subscriberANDpublisher();
void callback(const sensor_msgs::ImageConstPtr &image,
const sensor_msgs::PointCloud2ConstPtr &lidar1,
const sensor_msgs::PointCloud2ConstPtr &lidar2,
const sensor_msgs::PointCloud2ConstPtr &lidar3,
const sensor_msgs::PointCloud2ConstPtr &lidar4);
private:
ros::NodeHandle nh;
ros::Publisher camera_pub;
ros::Publisher lidar1_pub;
ros::Publisher lidar2_pub;
ros::Publisher lidar3_pub;
ros::Publisher lidar4_pub;
message_filters::Subscriber<sensor_msgs::PointCloud2> lidar1_sub;
message_filters::Subscriber<sensor_msgs::PointCloud2> lidar2_sub;
message_filters::Subscriber<sensor_msgs::PointCloud2> lidar3_sub;
message_filters::Subscriber<sensor_msgs::PointCloud2> lidar4_sub;
message_filters::Subscriber<sensor_msgs::Image> camera_sub;
typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::Image,
sensor_msgs::PointCloud2,
sensor_msgs::PointCloud2,
sensor_msgs::PointCloud2,
sensor_msgs::PointCloud2> syncpolicy;
typedef message_filters::Synchronizer<syncpolicy> Sync;
boost::shared_ptr<Sync> sync_;
};
#endif
main.c如下
#include <ros/ros.h>
#include "sync.h"
int main(int argc, char **argv) {
ros::init(argc, argv, "node");
subscriberANDpublisher sp;
ROS_INFO("main done! ");
ros::spin();
}
3、测试程序
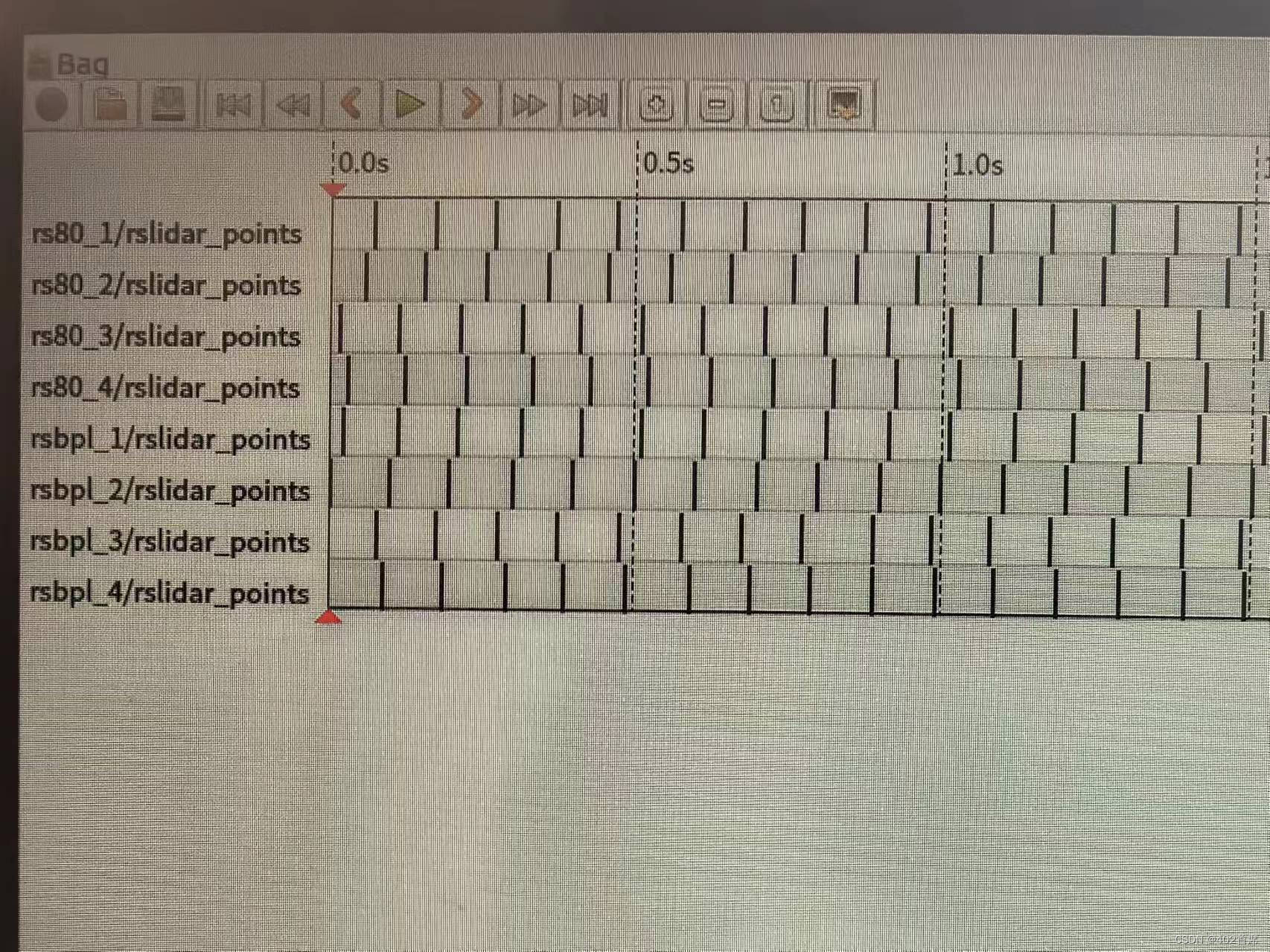
下图是时间同步前的消息发布时间
下图是调试过的
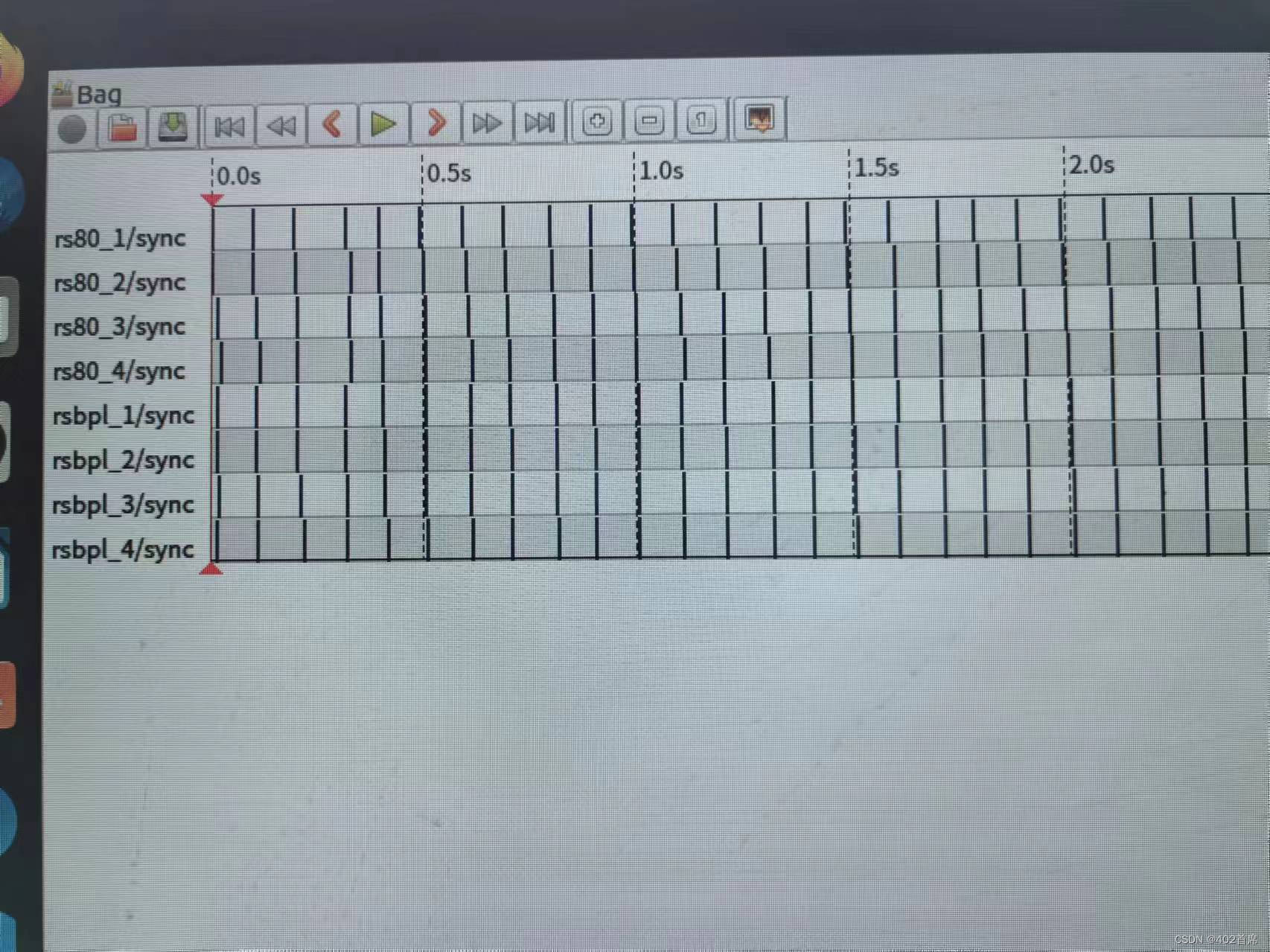
成功!


















 2534
2534

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









