







1.URDF
(1)unified robot description format,统一机器人描述格式;
(2)ROS中非常重要的机器人模型描述格式;
(3)可以解析URDF文件中使用xml格式描述的机器人模型;
(4)ROS同时也提供URDF文件的C艹解析器。
URDF示例:
<?xml version="1.0" ?>
<robot name="mbot">
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.16" radius="0.20"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
</link>
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0 0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
</robot>
2.< link > 连杆(刚体)
< link >
(1)描述机器人某个刚体部分的外观和物理属性;
< visual >:描述机器人link部分的尺寸(size)、颜色(color)、形状(shape)
< inertial >:描述link的惯性矩阵(inertial matrix)
< collision >:描述link的碰撞参数(collision properties)

3.< joint > 关节
< joint >

(1)描述机器人关节的运动学和动力学属性;
(2)包括关节运动的位置和速度限制;
(3)根据关节运动形式,可以将其分为六种类型。

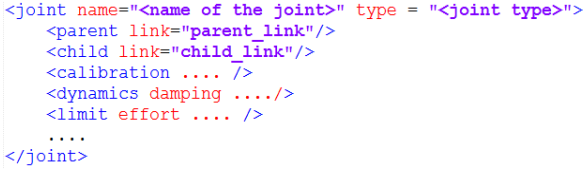
< joint >
< calibration >:关节的参考位置,用来校准关节的绝对位置;
< dynamics >:描述关节的物理属性,如:阻尼值、物理静摩擦力等,常在动力学仿真中用到;
< limit >:描述运动的极限值,包括关节运动的上下限位置、速度限制、力矩限制等;
< mimic >:描述该关节与已有关节的关系;
< safety_controller >:描述安全控制器参数。
4.< robot >
< robot >
(1)完整机器人模型的最顶层标签;
(2)< link >和< joint >标签都必须包含在< robot >标签内。


5.创建机器人建模的功能包
创建一个机器人建模的功能包
catkin_create_pkg mbot_description urdf xacro
说明
# 1. urdf: 存放机器人模型的urdf/xacro文件
# 2. mesher: 放置urdf中引用的模型渲染文件
# 3. launch: 保存相关启动文件
# 4. config: 保存rviz的配置文件

定义launch文件:


创建机器人模型:
step1 - 4都用display_mbot_base_urdf.launch启动
# display_mbot_base_urdf.launch
<launch>
<param name="robot_description" textfile="$(find mbot_description)/urdf/mbot_base.urdf" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_urdf.rviz" required="true" />
</launch>
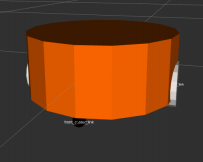
Step1: 使用圆柱体创建一个车体模型
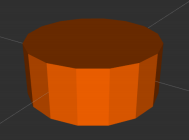
launch: display_mbot_base_urdf.launch
urdf如下:
<?xml version="1.0" ?>
<robot name="mbot">
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.16" radius="0.20"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
</link>
</robot>
Step2: 使用圆柱体创建左侧车轮
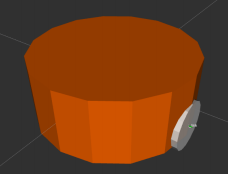
launch: display_mbot_base_urdf.launch
urdf如下:
<?xml version="1.0" ?>
<robot name="mbot">
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.16" radius="0.20"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
</link>
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0 0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
</robot>
Step3: 使用圆柱体创建右侧车轮
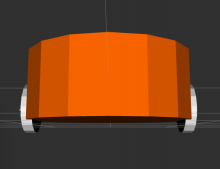
launch: display_mbot_base_urdf.launch
urdf如下:
<?xml version="1.0" ?>
<robot name="mbot">
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.16" radius="0.20"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
</link>
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0 0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="right_wheel_joint" type="continuous">
<origin xyz="0 -0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="right_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
</robot>
Step4: 使用球体创建前后支撑轮
launch: display_mbot_base_urdf.launch
urdf如下:
<?xml version="1.0" ?>
<robot name="mbot">
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.16" radius="0.20"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
</link>
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0 0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="right_wheel_joint" type="continuous">
<origin xyz="0 -0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="right_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="front_caster_joint" type="continuous">
<origin xyz="0.18 0 -0.095" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="front_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="front_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.015" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
<joint name="back_caster_joint" type="continuous">
<origin xyz="-0.18 0 -0.095" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="back_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="back_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.015" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
</robot>
Step5: 创建传感器 — — 摄像头
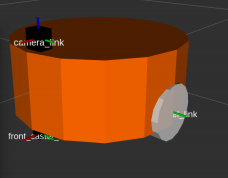
launch: display_mbot_with_camera_urdf.launch
<launch>
<param name="robot_description" textfile="$(find mbot_description)/urdf/mbot_with_camera.urdf" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_urdf.rviz" required="true" />
</launch>
urdf如下: mbot_with_camera.urdf
<?xml version="1.0" ?>
<robot name="mbot">
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.16" radius="0.20"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
</link>
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0 0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="right_wheel_joint" type="continuous">
<origin xyz="0 -0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="right_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="front_caster_joint" type="continuous">
<origin xyz="0.18 0 -0.095" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="front_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="front_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.015" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
<joint name="back_caster_joint" type="continuous">
<origin xyz="-0.18 0 -0.095" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="back_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="back_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.015" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
<link name="camera_link">
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<box size="0.03 0.04 0.04" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
<joint name="camera_joint" type="fixed">
<origin xyz="0.17 0 0.10" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="camera_link"/>
</joint>
</robot>
Step5: 创建传感器 — — 激光雷达
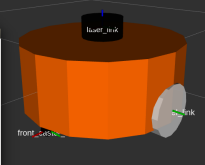
launch: display_mbot_with_laser_urdf.launch
<launch>
<param name="robot_description" textfile="$(find mbot_description)/urdf/mbot_with_laser.urdf" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_urdf.rviz" required="true" />
</launch>
urdf如下: mbot_with_laser.urdf
<?xml version="1.0" ?>
<robot name="mbot">
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.16" radius="0.20"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
</link>
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0 0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="right_wheel_joint" type="continuous">
<origin xyz="0 -0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="right_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="front_caster_joint" type="continuous">
<origin xyz="0.18 0 -0.095" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="front_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="front_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.015" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
<joint name="back_caster_joint" type="continuous">
<origin xyz="-0.18 0 -0.095" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="back_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="back_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.015" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
<link name="laser_link">
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<material name="black"/>
</visual>
</link>
<joint name="laser_joint" type="fixed">
<origin xyz="0 0 0.105" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="laser_link"/>
</joint>
</robot>
Step5: 创建传感器 — — kinect

launch: display_mbot_with_kinect_urdf.launch
<launch>
<param name="robot_description" textfile="$(find mbot_description)/urdf/mbot_with_kinect.urdf" />
<!-- 设置GUI参数,显示关节控制插件 -->
<param name="use_gui" value="true"/>
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
<!-- 运行rviz可视化界面 -->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mbot_description)/config/mbot_urdf.rviz" required="true" />
</launch>
urdf如下: mbot_with_kinect.urdf
<?xml version="1.0" ?>
<robot name="mbot">
<link name="base_link">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.16" radius="0.20"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 1"/>
</material>
</visual>
</link>
<joint name="left_wheel_joint" type="continuous">
<origin xyz="0 0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="left_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="right_wheel_joint" type="continuous">
<origin xyz="0 -0.19 -0.05" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="right_wheel_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.5707 0 0" />
<geometry>
<cylinder radius="0.06" length = "0.025"/>
</geometry>
<material name="white">
<color rgba="1 1 1 0.9"/>
</material>
</visual>
</link>
<joint name="front_caster_joint" type="continuous">
<origin xyz="0.18 0 -0.095" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="front_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="front_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.015" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
<joint name="back_caster_joint" type="continuous">
<origin xyz="-0.18 0 -0.095" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="back_caster_link"/>
<axis xyz="0 1 0"/>
</joint>
<link name="back_caster_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.015" />
</geometry>
<material name="black">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
<link name="kinect_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 1.5708"/>
<geometry>
<mesh filename="package://mbot_description/meshes/kinect.dae" />
</geometry>
</visual>
</link>
<joint name="laser_joint" type="fixed">
<origin xyz="0.15 0 0.11" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="kinect_link"/>
</joint>
</robot>
Step6:检查urdf模型整体结构
urdf_to_graphiz mbot_base.urdf


URDF模型的缺点:
(1)模型冗长,重复内容过多;
(2)参数修改麻烦,不便于二次开发;
(3)没有参数计算的功能;
…
















 3102
3102











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











