









文章目录
前言
多机导航控制通过引入namespace来区别不同机器人所需要的导航目标,以及每个机器人自身所需要的消息和服务,比如amcl_pose、odom等等。多机环境下namespace另一个重要作用是对各个机器人自身TF链路中frame_id的前缀修饰,通过namespace前缀的引入避免TF链路的冲突
map的层级结构
多机navigation控制的环境需要一个主机作为命令的中枢,同时能够实时反馈各个机器人的状态,比如odometry、planned path等等。主机的形式可以是中央模式,也可以是分布模式。主机不同的运行模式也决定了导航地图(map)的层级结构
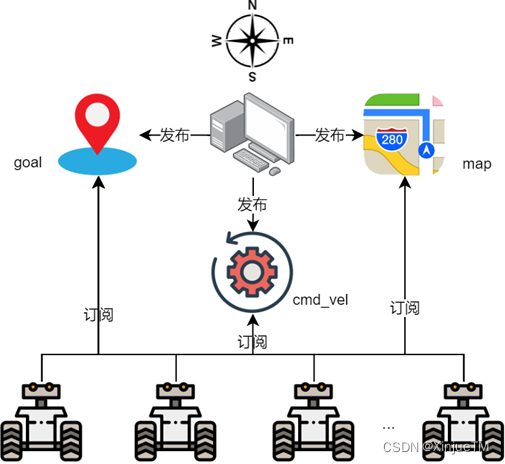
中央模式
所有navigation运算都在主机完成,各个机器人只负责运动命令的执行:
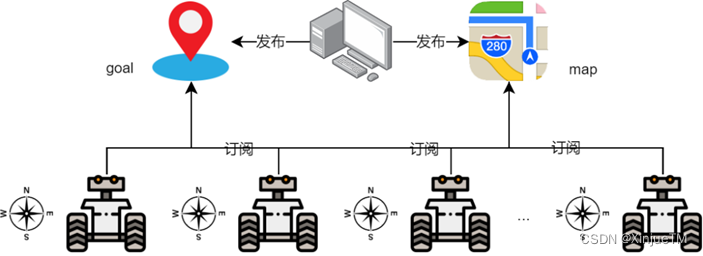
分布模式
各个机器人负责自身的navigation运算以及运动命令的执行,主机只负责发布地图map,以及对应机器人的导航目标点(推荐):
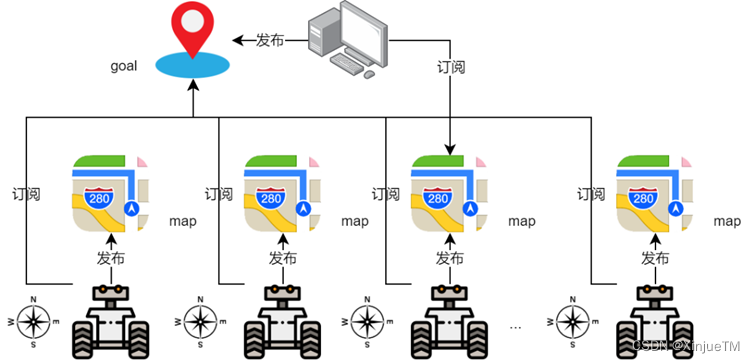
分布模式还有另一种形式,各个机器人独立运行map_server,主机订阅其中一个机器人发布的map:
三种模式对比:
| 模式 | 特点 | 适用场景 |
|---|---|---|
| 中央模式 | 共享地图,中央电脑需要比较强的算力,机器人数量不能过多否则导致运算能力不足 | 中央电脑算力强大,机器人数量较少 |
| 分布模式 | 共享地图,中央电脑没有算力要求,只需要发布地图和导航目标,导航运算由各个机器人自身负责,机器人舰队数量理论上无限制 | 机器人舰队规模较大 |
| 分布模式变化 | 地图由各个机器人自己维护,由于中央电脑订阅其中任意一个机器人所发布的地图,所以需要保证各个机器人的地图相同 | 机器人舰队规模较大 |
namespace的绝对/相对路径规定
在开始引入namespace之前,需要理解namespace的绝对/相对路径的定义。和Linux文件系统类似,符号“/”表示为绝对路径,相对路径则不需要前置该该符号,参考官网连接
理解namespace绝对/相对路径规定后,需要确认自行开发的代码,以及相关launch文件中,关于消息参数params、消息topic、服务service的名称都为相对的表达,通过相对表达的方式才能在引入namespace后,形成基于namespace的绝对名称
苇航智能的硬件驱动接口,在未引入namespace之前,加载参数使用的是绝对路径形式,下图中左边为未引入namespace时绝对路径的参数,右边为引入namespace后相对路径的参数: 
以上图为例:当引入namespace作为机器人个体的区分时,比如机器人命名为“Jack”,参数“pin_enable”将会自动加入Jack作为前缀形成绝对路径参数:
“/Jack/NaviBOT/hardware_interface/pin_enable”
苇航智能相关的launch文件,在未引入namespace之前,也有部分使用了绝对路径形式,下图为differential机器人硬件接口的launch文件,左图为未引入namespace前,remap命令cmd_vel都使用了绝对路径形式,右图为引入namespace后相对路径的形式:

以上图为例:未引入namespace前,单机运行,remap重映射命令cmd_vel到绝对名称“/cmd_vel”,且controller参数joint_state和base_controller都为绝对路径形式。引入namespace后,处于多机运行环境,为了区别面向各个机器人的命令和参数,则需要使用相对路径形式。如机器人命名为“Jack”,命令cmd_vel将被自动组合为:“/Jack/cmd_vel”
加入namespace
机器人本机
对机器人本机,namespace的加入只需要在整个navigation启动的launch文件加入
对比中央电脑架构形式,苇航智能选择分布模式的布局,该模式能够实现各个机器人共享同一个map,同时能实现更多的机器人的控制以获得更大的机器人舰队规模
下图为加入namespace之前和之后,文件“NaviBOT_navigation.launch”的内容对比,左图为未加入namespace前,右图为加入namespace后:
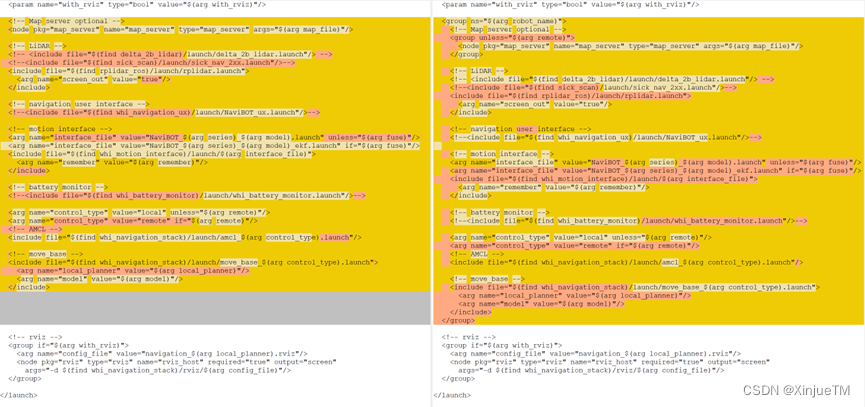
namespace覆盖了:LiDAR激光、运动硬件接口、amcl蒙特卡洛定位、move_base这四个navigation所需要的基础模块。其中“NaviBOT_ux”为苇航智能的导航交互拓展模块、“battery_monitor”为苇航智能电量监控模块,它们都不是navigation运行的必要模块。同时注意到,右图中依然存在map_server模块,但使用了< group unless >的标签,该标签以条件变量的形式实现了其内包含的逻辑是否需要引入。为了兼顾单机控制,苇航智能使用了变量“remote”控制map_server模块的引入,当其值为false时,则表示为单机运行模式,需要引入map_server;否则为多机运行模式,则不引入map_server而是订阅使用中央电脑所发布的地图
远程中央电脑
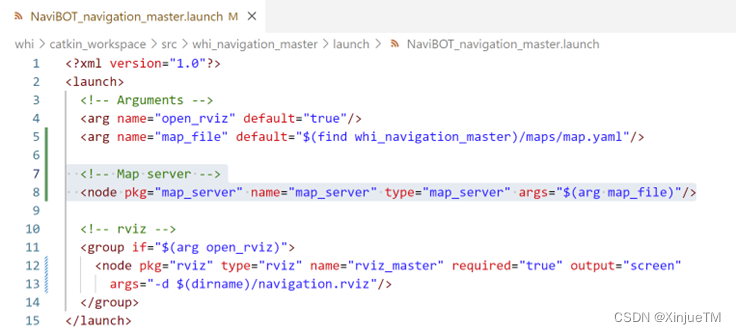
基于分布模式,远程中央电脑只需发布地图(map)信息,所以其launch文件需要引入map_server:
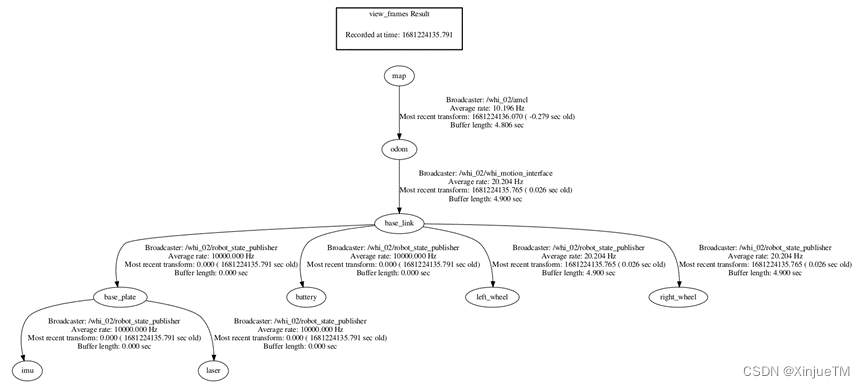
加入namespace后,机器人的TF链路和下图类似,每一个节点的“Broadcaster”都有namespace作为前缀:
frame_id
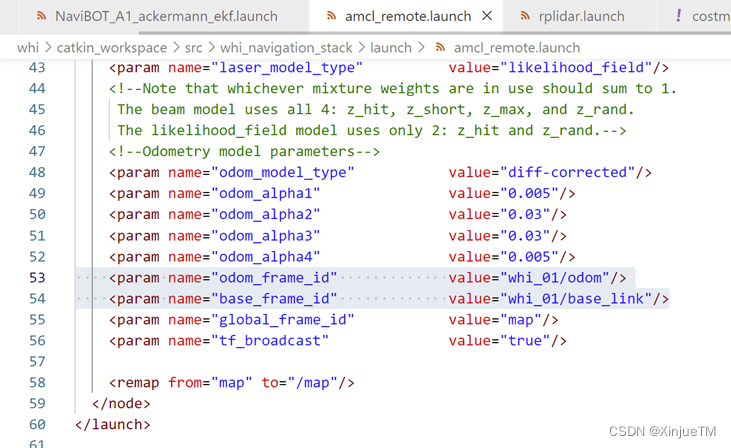
frame_id用于TF链路,要注意明确其定义,不要与主题(topic)混淆。namespace加入后会自动在相应的主题名称前加入namespace前缀,但对于frame_id则没有自动添加前缀的过程。对于有变量“tf_prefix”的模块或者程序,可以通过设置tf_prefix与namespace一致,模块会自动把前缀加入到frame_id之前,如果模块没有该变量,则需要为模块所提供的frame_id变量显示的加入目标namespace,比如amcl模块中的odom和base的frame_id:
需要加入namespace前缀的frame_id及其对应模块:
| 模块 | frame_id名称 | 修改为 |
|---|---|---|
| amcl | odom_frame_id | < ns >/odom |
| amcl | base_frame_id | < ns >/base_link |
| costmap_2d | obstacles/laser_scan_sensor/sensor_frame | < ns >/laser |
| costmap_2d | global_costmap/robot_base_frame | < ns >/base_link |
| costmap_2d | local_costmap/global_frame | < ns >/odom |
| costmap_2d | local_costmap/robot_base_frame | < ns >/base_link |
| robot_state_publisher | tf_prefix | < ns > |
| LiDAR(rplidar_ros) | frame_id | < ns >/laser |
NOTE: 这里只罗列了导航基本框架中的模块,如果读者系统有其他模块存在frame_id,则可以参照做对应修改
为frame_id加入对应namespace后的TF链路为下图(两个机器人whi_01和whi_02),注意观察与上个章节加入namespace后TF链路对比:frame_id的每一个节点都有namespace的前缀,这样就能保证多机运行时TF链路无干涉:

RViz topic加入namespace
以namespace命名为“test_ns”为例,为了使中央电脑运行的RViz navigation环境中能够可视化导航信息,也需要对应修改的主题,为其加入namespace,限于篇幅,这里只举例RobotModel,其余读者可依次类推进行修改:
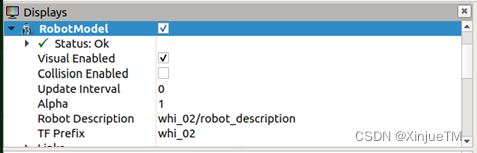
RobotModel使用了tf_prefix形式,因此Robot Description和TF Prefix都需要加入对应namespace
Tool Properties添加namespace
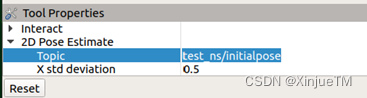
加入namespace后,RViz navigation导航界面中两个最常用的工具“2D Pose Estimate”和“2D Nav Goal”也需要对应的namespace,以形成基于namespace的初始位置设置和导航目标设置的命令主题
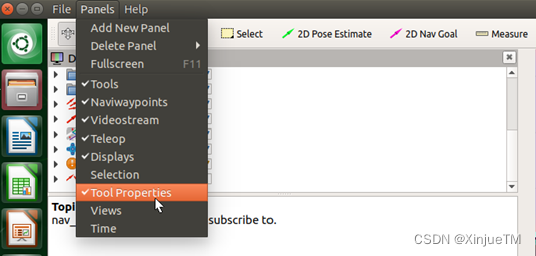
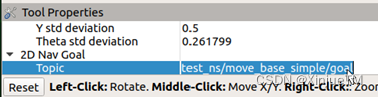
navigation运行后,选择菜单“Panels->Tool Properties”,在弹出的对话框中为工具“2D Pose Estimate”以及“2D Nav Goal”分别添加对应的namespace。依然以namespace命名为“test_ns”为例,分别在主题“/initialpose”和“/move_base_simple/goal”前加入namespace:
多机导航运行
基于前述采用了分布模式,中央电脑负责地图的发布,机器人各自负责导航运算,在这个结构下,则自然将中央电脑设置为master,机器人设置为client。关于ROS中多机运行机制,读者可参考官网连接
设置master
在终端输入命令:
nano ~/.bashrc
在打开的文件最后加入内容:
export ROS_MASTER_URI=http://< ip of master >:11311
export ROS_HOSTNAME=< ip of master >
保存退出,在终端继续输入命令:
source ~/.bashrc
设置client
在终端输入命令:
nano ~/.bashrc
在打开的文件最后加入内容:
export ROS_MASTER_URI=http://< ip of master >:11311
export ROS_HOSTNAME=< ip of robot >
保存退出,在终端继续输入命令:
source ~/.bashrc
时间同步
多机运行环境下,各个机器间的时间戳需要统一。否则可能出现执行导航命令失败的情况,以下图为例:左图为master的时间戳,右图为client的时间戳,master时间要快于client时间大概2分钟:

当在master中首先给定机器人执行多点路径导航操作后,机器人actionlib中记录的当前目标时间戳即为master当前的时间,随后如果再通过client自身发送导航目标操作,会出现不能执行导航的现象。这是因为2D Navi Goal使用的是move_base_simple/goal为主题的消息方式发送导航目标,该方式下move_base收到目标消息(类型geometry_msgs::PoseStamped)后,将该目标转换为move_base的目标消息move_base_msgs::MoveBaseActionGoal,同时为其赋值了client自身的时间,再转发消息给actionlib,因此,会出现新导航目标时间戳早于actionlib所记录的当前目标时间戳的情况,在该情况下,actionlib将认为这是一个无效目标,从而放弃目标的执行
为了解决这个问题,需要同步master和各个client之间的时间,苇航智能推荐使用NTP(Network Time Protocol),关于其使用配置不在本文讨论范围,读者可网络搜索
运行
在中央电脑打开一个终端,运行能够发布map的launch文件,读者可参考GitHub上苇航智能发布的 master package
对各个机器人的终端,都输入导航运行的launch,由于实现路径不尽相同,这里不做举例说明
当中央和各个机器人都运行后,即可通过Tool Properties,改变“2D Nav Goal”的前缀,分别实现对各个机器人的导航控制,也可以通过苇航智能的插件 Navi_namespace 通过GUI的方式实现对各个机器人的导航控制:

总结
使用namespace为topic、params、TF加入前缀以实现对应机器人的导航控制。如果文中出现了描述错误以及不清晰的地方,欢迎指正,共同交流:xinjue.zou.whi@gmail.com














 3145
3145











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









