







ubuntu20.04 + ros noetic + ur
ros1
鱼香ros一键ros1 yyds
ur
进入工作空间src目录,下载UR机械臂相关工具包
#clone the driver
git clone https://github.com/UniversalRobots/Universal_Robots_ROS_Driver.git src/Universal_Robots_ROS_Driver
#clone fork of the description.
git clone https://github.com/ros-industrial/universal_robot.git src/universal_robot
rosdep update #如果之前在安装ros时候已经做了这步那就不用重复了
rosdep install --from-paths src --ignore-src -y
catkin_make #开始编译
source devel/setup.bash
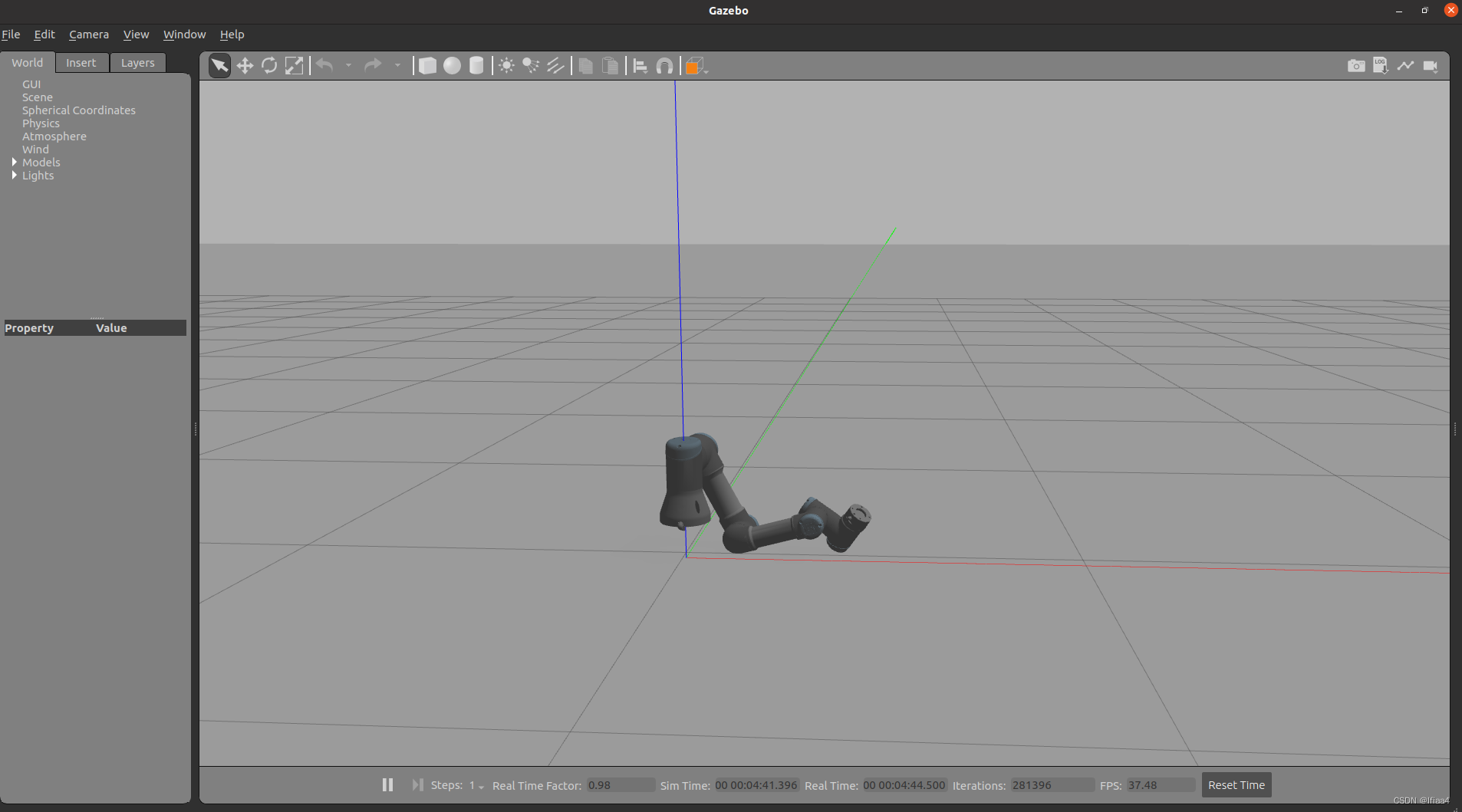
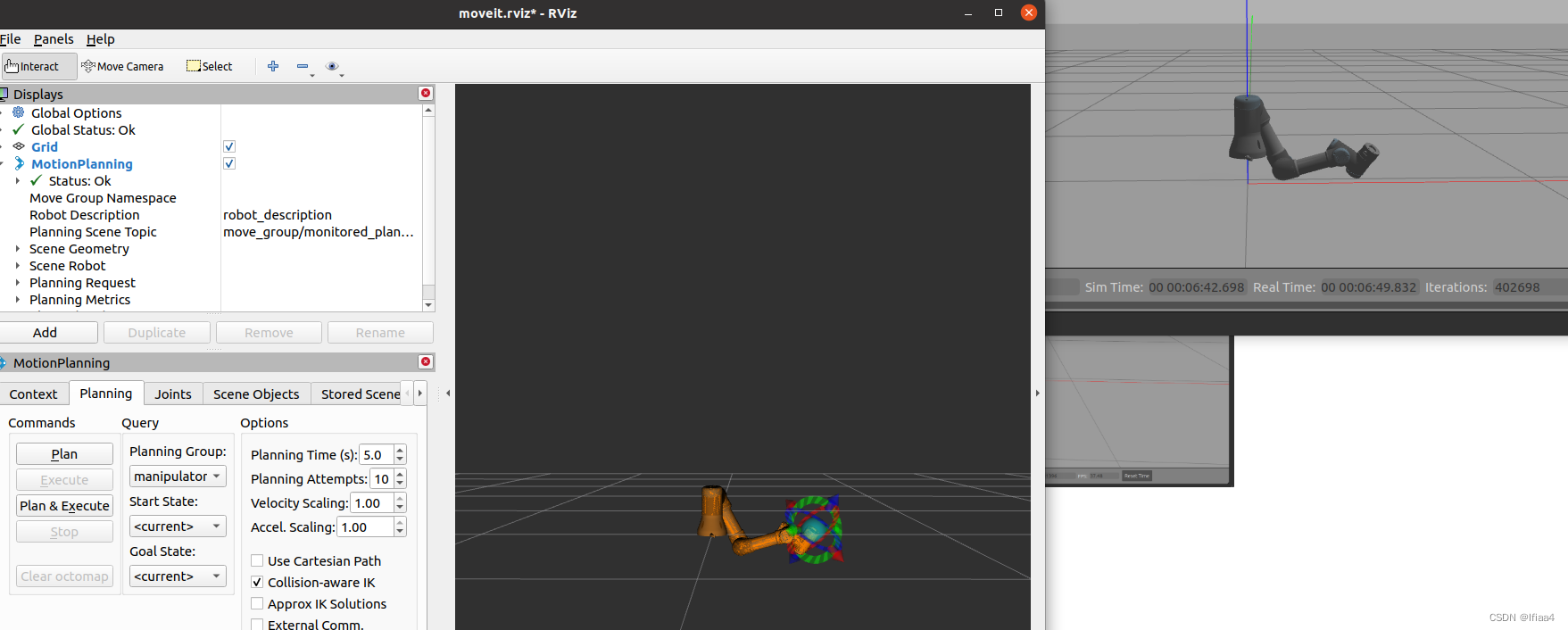
rviz+gazebo仿真环境用moveit路径规划同步运动
# 启动gazebo仿真环境
roslaunch ur_gazebo ur3_bringup.launch
# 如果gazebo报错,可能是之前的没有完全关闭,需要执行killall gzserver
# new terminal
# 在仿真中进行路径规划
roslaunch ur3_moveit_config moveit_planning_execution.launch sim:=true
roslaunch ur3_moveit_config moveit_rviz.launch














 3792
3792











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









