










作为第一次接触Linux的小白,其实很多时候不适应的原因的很多Windows中的软件没法在Linux中安装,这篇文章仅仅介绍本人在Linux中的Ros学习中给我帮助很大的几款软件
一.截屏录屏软件 Kazam
这款软件是我一开始接触Linux的时候有很多问题,找别人问的时候发现用手机拍照不能很好传达我的问题,故找到了这样一款软件,总的来收功能很强大,窗口截屏,区域录屏等等都很方便(这张图是使用QQ截图弄得,顺便介绍一下还没怎么弄明白的Wine版QQ,目前来收,QQ在Windows中的Ctrl+Alt+A截屏能用,但是只能用一次,用了一次就得退出重新登录才能用第二次,并且如果你有终端助手,后面我讲到的一个软件,它俩会冲突)

为什么推荐这个软件呢,因为他安装实在是太简单了
sudo apt-get install kazam
如果安装不了更新源试试,一下所有软件都是可能需要更新源或者软件列表的
另外,也可以使用系统截图,PrintScene就能直接截图,可能是我的Ubuntu版本问题?我看网上有的博客系统甚至有录屏快捷键。
二.wine版QQ
QQ能用之后简直让刚接触Linux的我看到了生活的希望,之前传送文件都是拖到别的磁盘然后使用Windows操作,而且有的时候消息也不会错过,安装过程肯定是比较复杂了
参考链接: Ubuntu使用QQ
如果解决不了大家可以不用安装,毕竟不是必须(微信也能装,不过我没装好,至今没打开成功过)
三.终端助手
参考: 知乎链接
 可以把终端分成多个,对于ROS来说是最大的福音,另外,一些个性化的字体设置什么的还需要自己去配,Ctrl+Shift+E从当前中断中间纵向愤慨(上图的下半部分),Ctrl+Shift+O横向切分终端(上图的整体)
可以把终端分成多个,对于ROS来说是最大的福音,另外,一些个性化的字体设置什么的还需要自己去配,Ctrl+Shift+E从当前中断中间纵向愤慨(上图的下半部分),Ctrl+Shift+O横向切分终端(上图的整体)
安装也是很简单的
sudo apt-get install terminator
四.VsCode 重头戏来了!!!前面都不看请好好看这个
众所周知,Ros初学者或者Linux初学者只是用文本编辑器编辑源文件,这样不仅代码格式不好调,而且库文件也找不到,所以,编译器是很必要的
这里推荐VsCode,当然你喜欢其他的也没问题
先放参考链接: 快速搭建C++编程环境
有兴趣的一定装一下试试,真的不一样,当你双击头文件转到定义能打开的时候,感觉世界又光明了!!!
这里简单说一下头文件路径如何添加
我的方法很土…
1.打开一个ROS.cpp的源文件
2.找到头文件定义而且又波浪线的地方(就是头文件找不到)
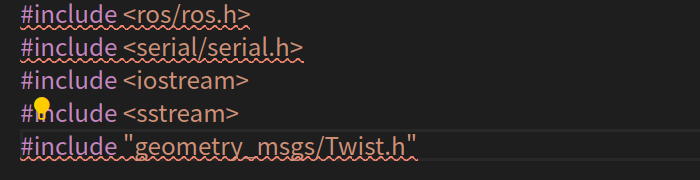
3.左侧资源管理器添加文件夹,讲ROS的库文件夹添加进来
opt/ros/melodic/include
把这个最大的库加进来就会自动搜索这个目录和子目录下的.h头文件
(其实我是没研究出来配置软件的Path选项,采用这种笨法的,日后找到了会加上)
而且Code关闭之后还会帮你把之前添加的include打开,所以也没啥动力去研究















 344
344











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









