






如标题所示,当我们想在OMPL库自定义算法时,总会出现出现各种各样的问题,具体的如何自定义算法自己搜索就可以找到,这个帖子我只是想解决一个问题。
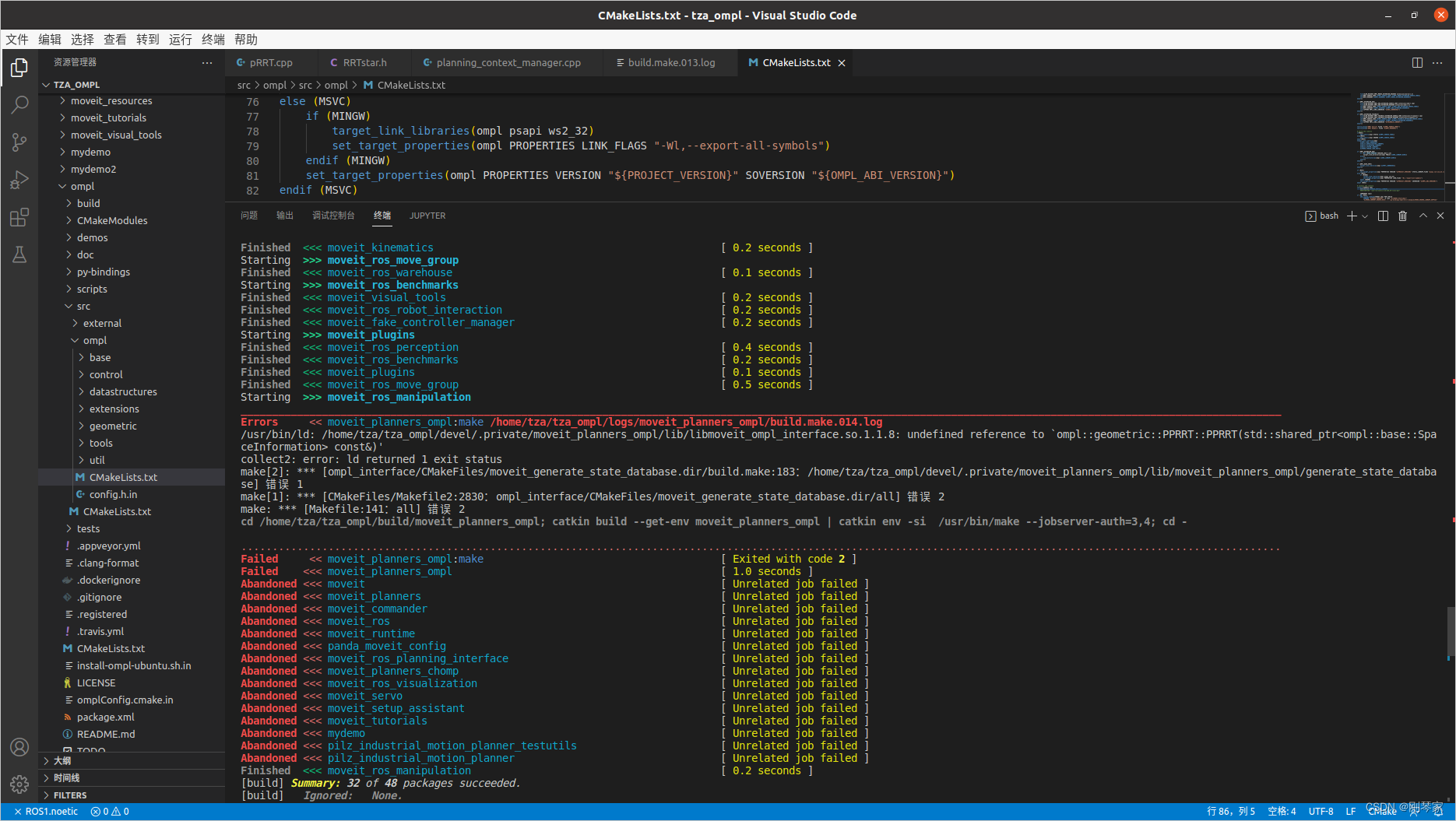
如下图所示,在配置好自定义算法个步骤后,进行sudo catkin build居然出现了下面的问题,系统提示我们自定的算法PPRRT算法居然
/usr/bin/ld: /home/tza/tza_ompl/devel/.private/moveit_planners_ompl/lib/libmoveit_ompl_interface.so.1.1.8: undefined reference to
`ompl::geometric::PPRRT::PPRRT(std::shared_ptr<ompl::base::SpaceInformation> const&)'
那么解决办法分为以下几个步骤
第一步到/home/tza/tza_ompl/devel/.private/moveit_planners_ompl/lib/这个目录里,将文件libmoveit_ompl_interface.so.1.1.8给删除掉。如果在devel文件夹下找不到.private文件就按Ctrl+H 就可以看到了。
第二步
到/opt/ros/noetic/lib/x86_64-linux-gnu目录下,将libompl.so libompl.so.16 和 libompl.so.1.5.2复制到/opt/ros/noetic/lib目录下,具体操作如下所示。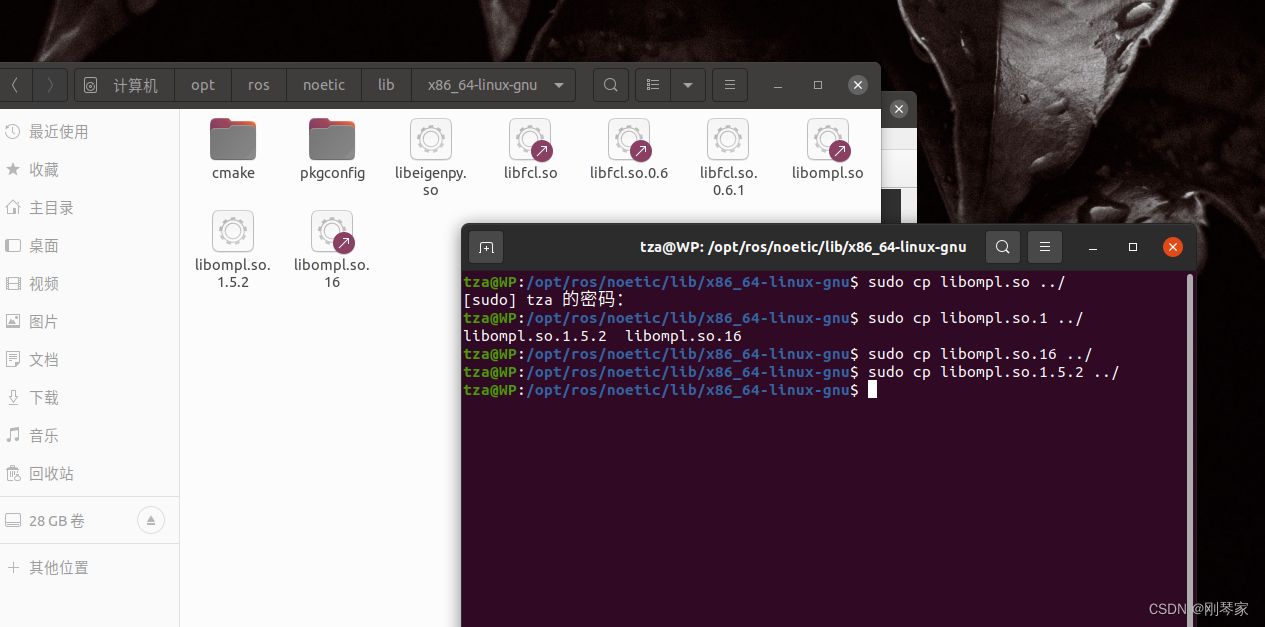
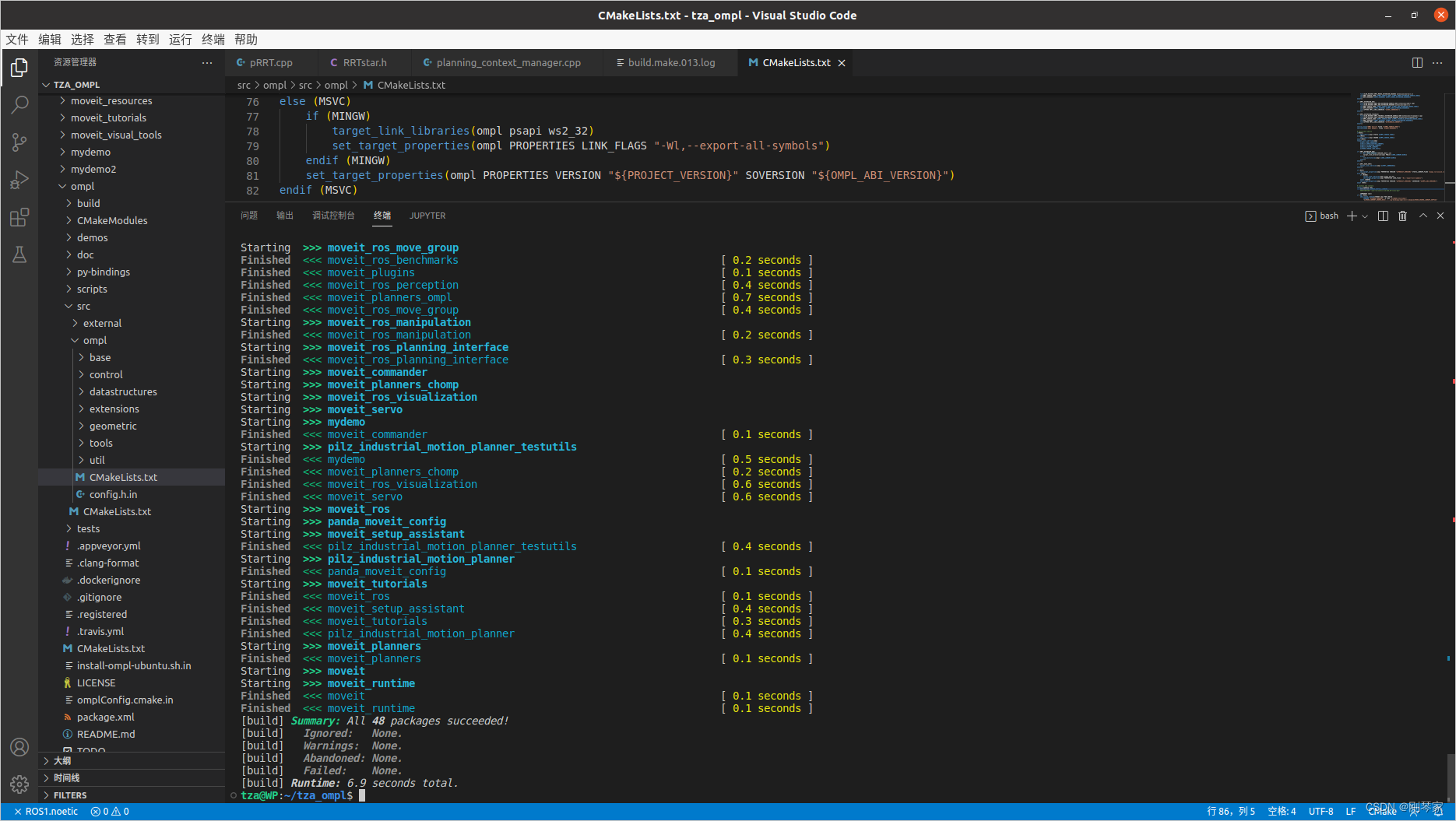
好了,废话不多说,上结果。直接sudo catkin build。
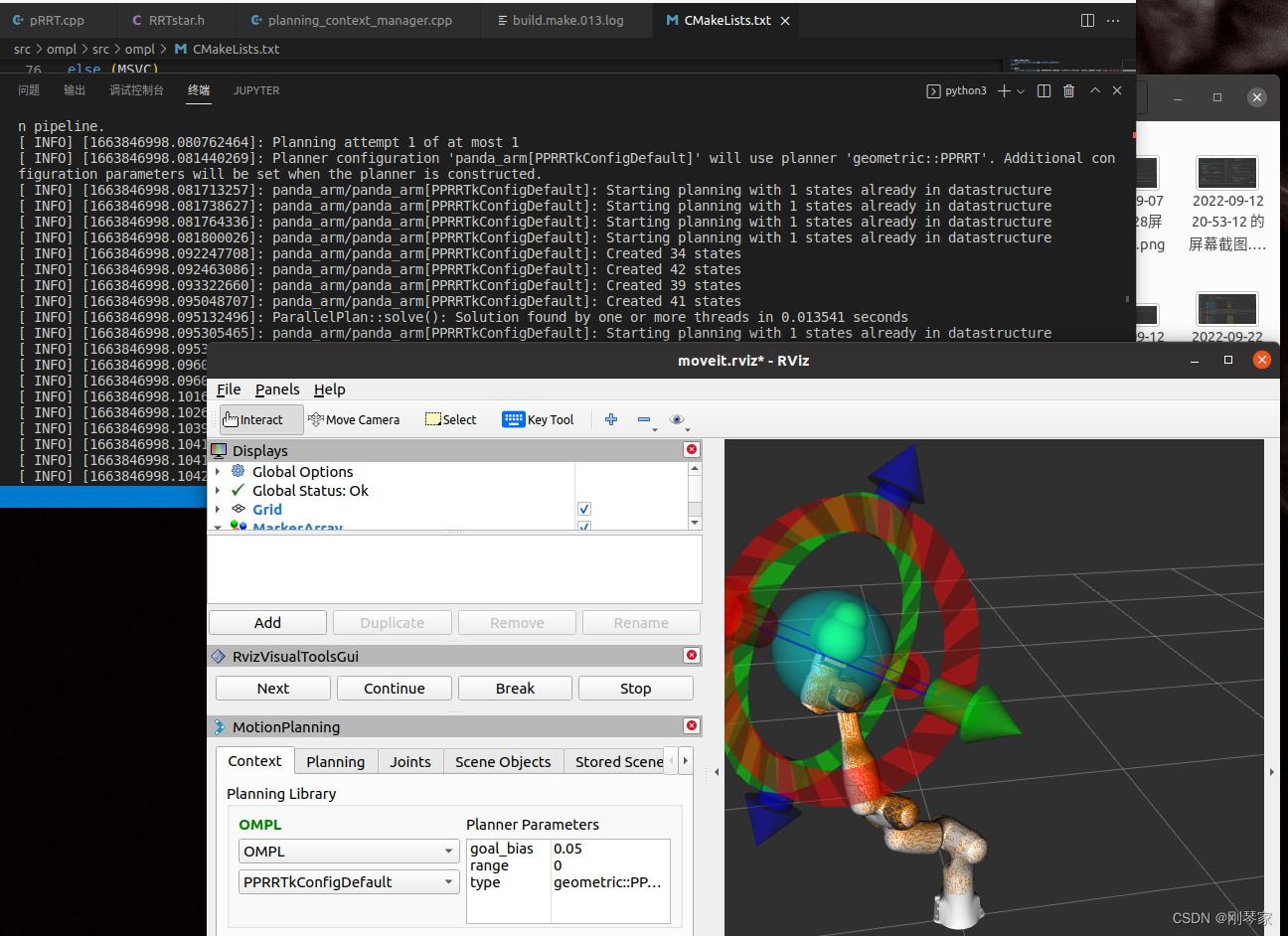
最后我们source一下环境,再roslaunch一下moveit官方库提供的机器人demo,看看结果吧。















 351
351











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









