






ZED2标定
一、ZED2相机标定
首先说明一下为什么要写这篇文章,最近在重新录一个demo,需要ZED2相机,所有想重新标定一下。主要使用的标定方法是ROS的 camera_calibration方法和Kalibr包。前期的CUDA、ZED SDK安装以及ZED2的ros包都可以在 ZED官网和对应的 GitHub找到。
在安装好CUDA和ZED SDK后,打开相机其实已经在ubuntu的本地生成了一个本机自带的标定文件,如果时间比较紧或者不想进行标定的也可以直接使用。
$ /usr/local/zed/setting/SN********.conf
关于使用camera_calibration进行标定
1、首先是安装camera_calibration,直接运行安装命令即可
$ rosdep install camera_calibration
$ sudo apt-get install ros-kinetic-camera-calibration //两个命令选一即可
将ZED2从GitHub下载的 zed-ros-wrapper放到ROS工作空间编译。
2、运行ZED2相机(会发布zed2话题)
$ roslaunch zed_wrapper zed2.launch
这里要说明的一点是,可以在
$ zed-ros-wrapper/zed_wrapper/params 文件夹
找到common.yaml文件,里面可以修改相机的分辨率等等信息(resolution参数,修改至2k、1080P、720P和VGA),还有就是img_downsample_factor参数和depth_downsample_factor参数这两个会修改你ROS发布话题的图片大小,比如修改到0.5时,所有发布的图片话题的长和宽都会缩小一倍(这个问题我找了很长时间、头大-_-)
3、运行 camera_calibration
这里需要在官网下载一个标定板,8×6的标定板
用A4纸,按照25%打印即可。
运行标定指令:
$rosrun camera_calibration cameracalibrator.py --size 8×6 --square 0.027 right:=/zed2/zed_node/right/image_rect_color left:=/zed2/zed_node/left/image_rect_color left_camera:=/zed2/zed_node/left right_camera:=/zed2/zed_node/right --no-service-check
这个指令的详解可以参考camera_calibration 官网所写的。这里简单说下:
–size 是标定板的大小(棋盘内部角点的个数),比如我上面那个就是8×6,,方格几列几行(需要减1)
–square 就是每个方块的大小,因为该PDF的方块原大小是108mm,打印时缩放到25%,所以结果是0.027m
right:=和left:= 就是左右目相机发布的话题,后面的对应的就是相机。
–no-service-check 这个参数就是启动时禁用对 set_camera_info 服务的检查,出现no service的错误时使用就可以。
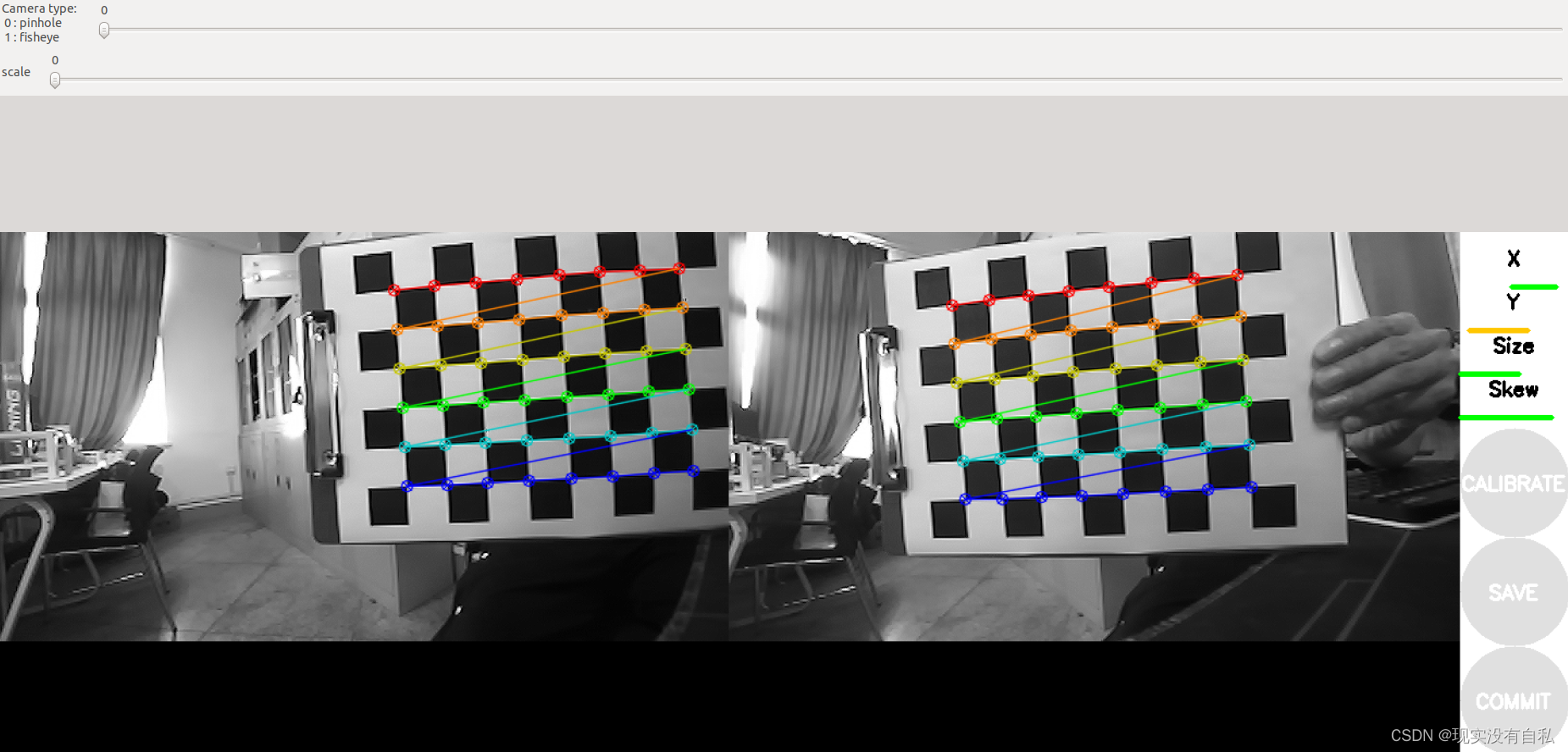
4、标定
运行上面的指令后,就会出现下面的这个界面,通过不断移动(前后左右、倾斜、旋转),直到右侧的CALIBRATE按钮亮起,即可进行标定。点击该按钮后就会进行标定(结果会输出在终端中),在标定完成后再点击Save按钮会将结果保存在 /tmp文件夹当中,是calibrationdata.tar.gz压缩包(里面包含了标定的所有图片和left.yaml、right.yaml、ost.yaml)
此时相机标定就已经结束了。如果是简单的双目标定,camera_calibration就可以了。
单目标定其实也差不多,命令稍微变了一下,可以参考博主1
对于使用Kalibr进行标定(生成一个pdf文件、camchain.yaml文件、results-cam.yaml),我推荐看 博主2 写的很详细。
二、ZED2的IMU标定
IMU标定, 博主2 也写的十分详细,使用的是imu_utils和code_utils进行标定,以及相机和IMU的联合标定。
记录
2022.09.20
进行相机标定
此文目的是学习SLAM,只是记录一下,欢迎各位大神前来指点
参考:https://blog.csdn.net/weixin_44436677/article/details/105620262

















 3770
3770

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









