






本人最近在用ROS进行课题仿真,自建了一个四轮差速小车模型,但是在使用teleop_twist_keyboard teleop_twist_keyboard.py控制小车运动时,Gazebo和Rviz中的模型都没有反应。
请问有没有大佬知道怎么回事呢
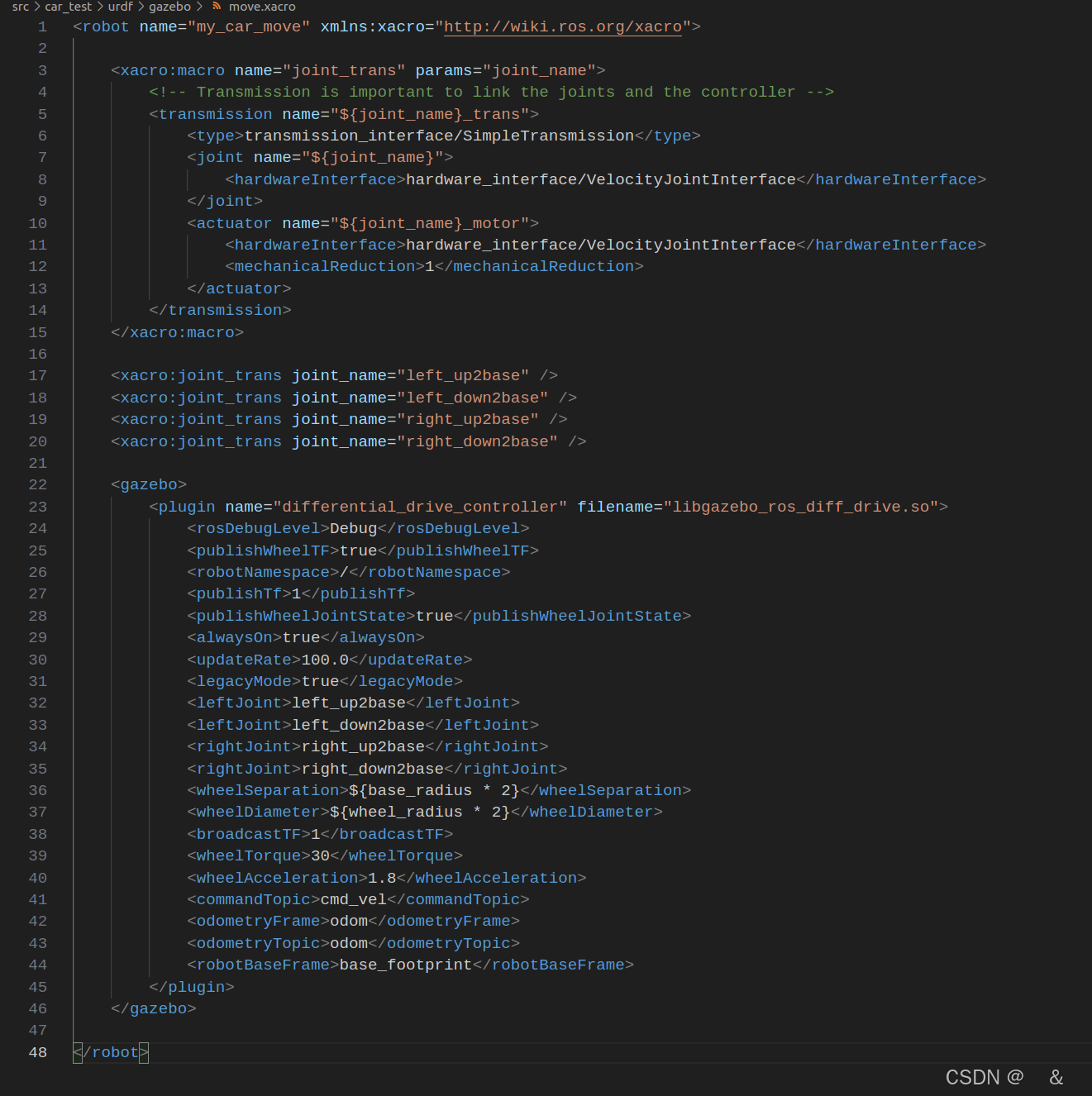
底盘xacro文件如下:
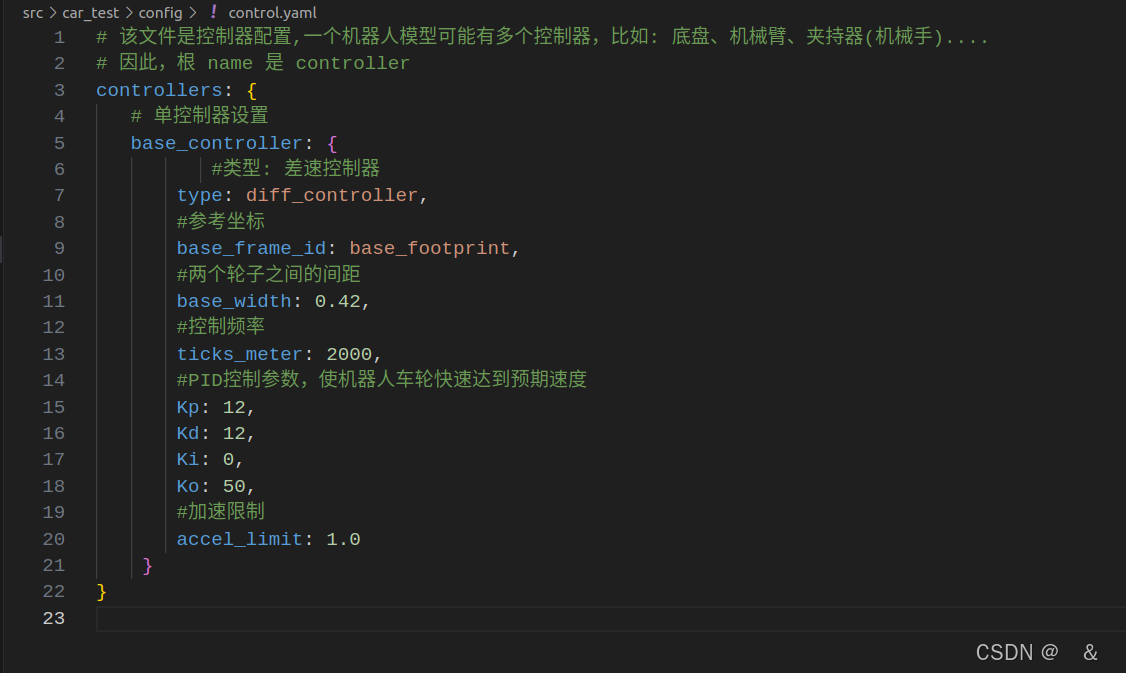
control.yaml文件如下:
本人最近在用ROS进行课题仿真,自建了一个四轮差速小车模型,但是在使用teleop_twist_keyboard teleop_twist_keyboard.py控制小车运动时,Gazebo和Rviz中的模型都没有反应。
请问有没有大佬知道怎么回事呢
底盘xacro文件如下:
control.yaml文件如下:
 1579
1620
7263
1579
1620
7263

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























