






 本文介绍了如何使用rosbag进行数据记录,通过rqt_bag查看和定位数据,以及如何使用MATLAB对/turtle1/cmd_vel话题的数据进行读取、提取并绘制图形。
本文介绍了如何使用rosbag进行数据记录,通过rqt_bag查看和定位数据,以及如何使用MATLAB对/turtle1/cmd_vel话题的数据进行读取、提取并绘制图形。
一、rosbag指令
首先创建一个文件夹,cd该文件夹后,运行下面的指令记录数据
rosbag record -a参考链接:rosbag使用方法汇总_rosbag用法-CSDN博客
记录完成后,为了定位数据,在rqt_bag中打开该文件
二、rqt_bag分析数据
首先启动ros
roscore
rqt_bag
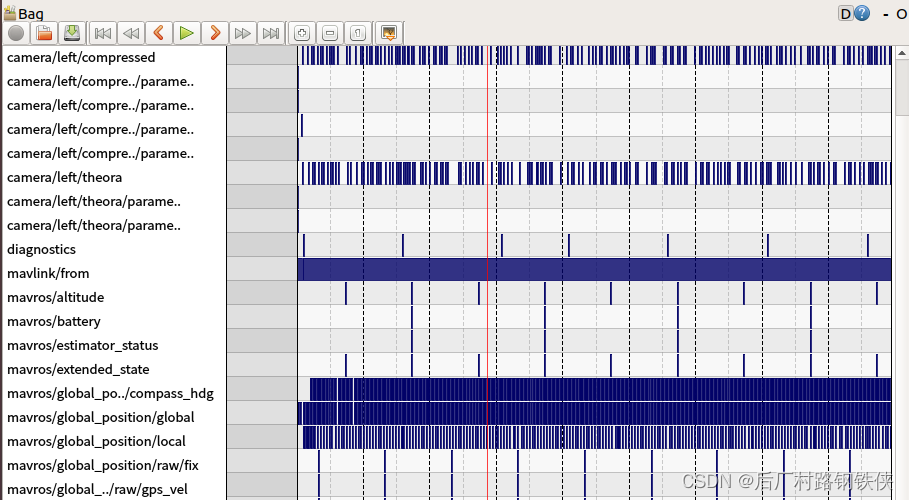
点击文件夹打开录制好bag文件

打开后的界面
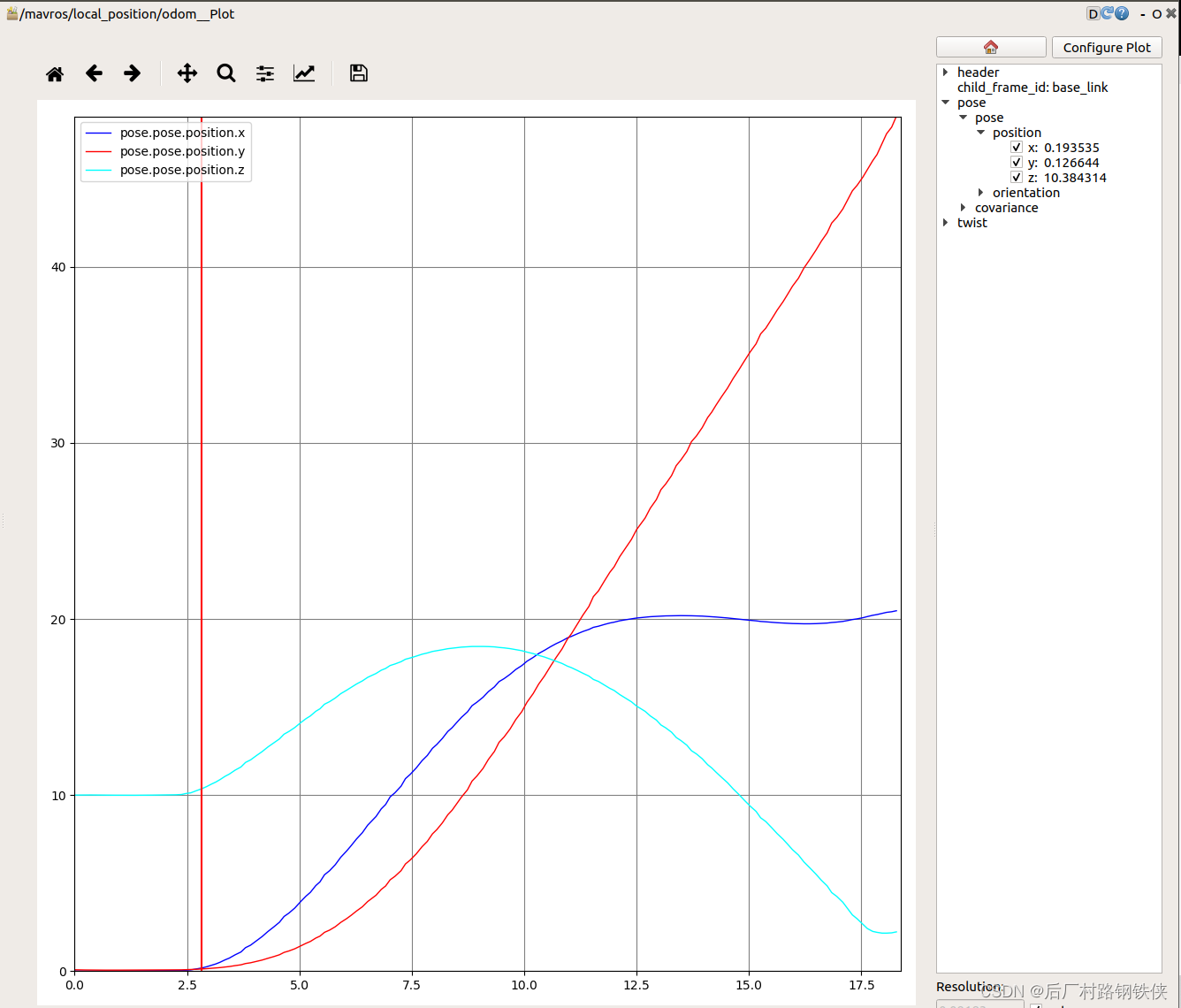
选择话题,右键-view-plot画图
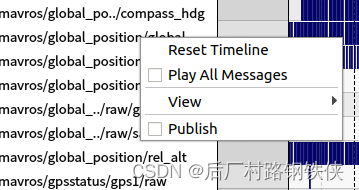
如图所示
 三、matlab分析
三、matlab分析
参考资料:rosbag数据画图MATLAB_matlab rosbag-CSDN博客
录入数据:
bag = rosbag('wugui.bag');获得具体的数值
sel = select(bag, 'Topic', '/turtle1/cmd_vel');
msgStructs = readMessages(sel,'DataFormat','struct');获得单个数据
vx1 = cellfun(@(m) double(m.Linear.X),msgStructs);
vy1 = cellfun(@(m) double(m.Linear.Y),msgStructs);
vz1 = cellfun(@(m) double(m.Linear.Z),msgStructs);画图
figure(1)
hold on;
plot(d01x,d01y,'Color','b','LineStyle','-','LineWidth',1);
grid on; 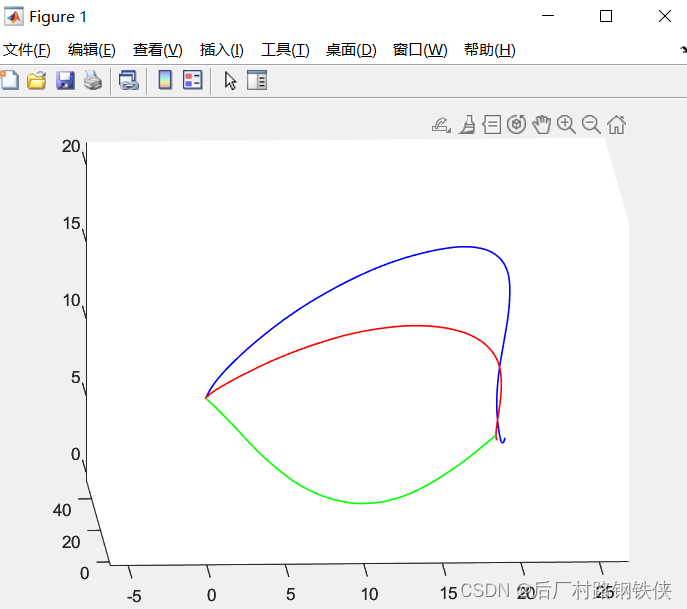















 323
323











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









