







参考GitHub - kafeiyin00/livox_repub: republish livox raw message to standard pointcloud2
1.拉取并编译Livox_repub
mkdir -p ~/ws_livox_repub/src
cd ~/ws_livox_repub/src
git clone https://github.com/kafeiyin00/livox_repub.git
cd ..
catkin_make
2.重新发布lidar topic
新建终端:
(1)roscore
(2)roslaunch livox_repub livox_repub_online.launch
(3)rosbag play your_raw_bag.bag //播放CustomMsg格式的bag
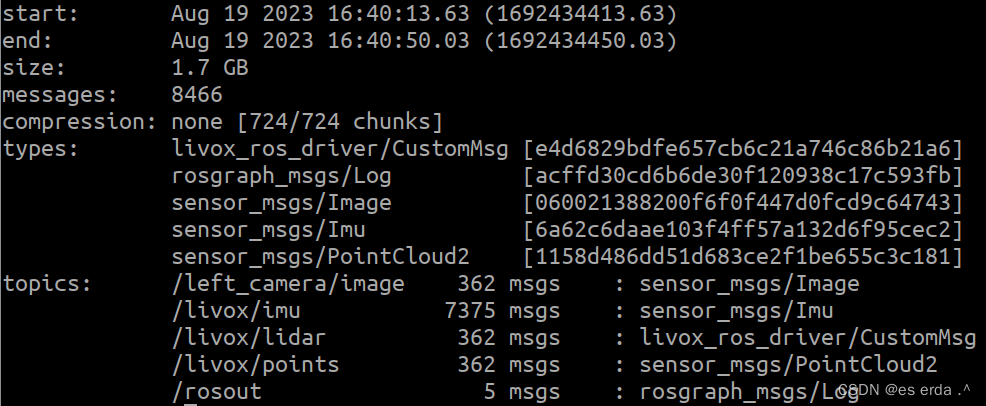
(4)rosbag record -a //录制重新发布的lidartopic(record -a是省事,按需要选择要录制的topic)
得到的bag结果如图:















 223
223











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









