







一下载ros_rslidar-master.zip这个rslidar可视化ros包
1.首先创建一个ros工作台
mkdir -p rslidar_ws/src
然后把压缩包放进去解压出现ros_rslidar-master
cd rslidar/src
catkin_make
之后遇到如下错误:
ros:velodyne_driver/input.h:37:10: fatal error: pcap.h: No such file or directory
这是应为缺少pcap库,有两种方法解决:
直接
sudo apt-get install libpcap0.8-dev
然后遇到如下错误:
Failed to fetch http://mirrors.ustc.edu.cn/ros/ubuntu/pool/main/r/ros-melodic-stage-ros/ros-melodic-stage-ros_1.8.0-0bionic.20220127.155612_amd64.deb Could not resolve 'mirrors.ustc.edu.cn'
首先更新源
$ sudo gedit /etc/apt/sources.list
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial main multiverse restricted universe
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-backports main multiverse restricted universe
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-proposed main multiverse restricted universe
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-security main multiverse restricted universe
deb http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-updates main multiverse restricted universe
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial main multiverse restricted universe
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-backports main multiverse restricted universe
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-proposed main multiverse restricted universe
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-security main multiverse restricted universe
deb-src http://mirrors.ustc.edu.cn/ubuntu-ports/ xenial-updates main multiverse restricted universe
sudo apt update
还是有这个错误,结果发现是没联网,虚拟机设置了手动IP
解决方法:
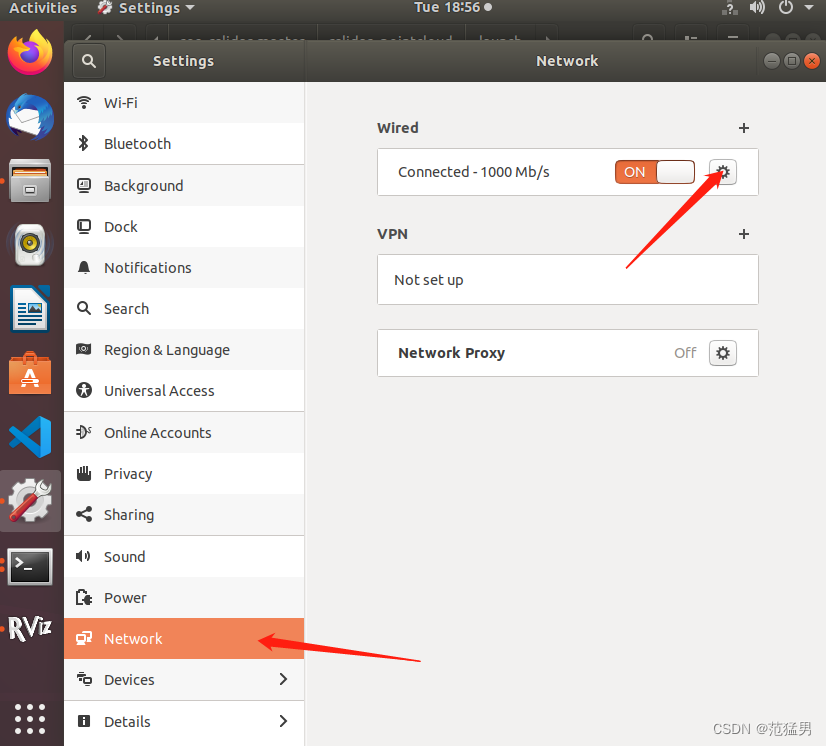
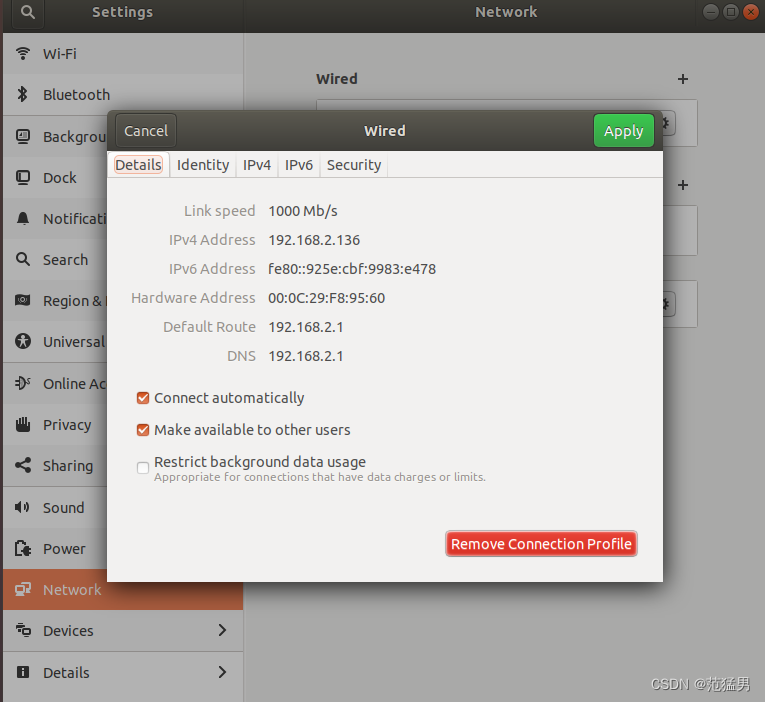
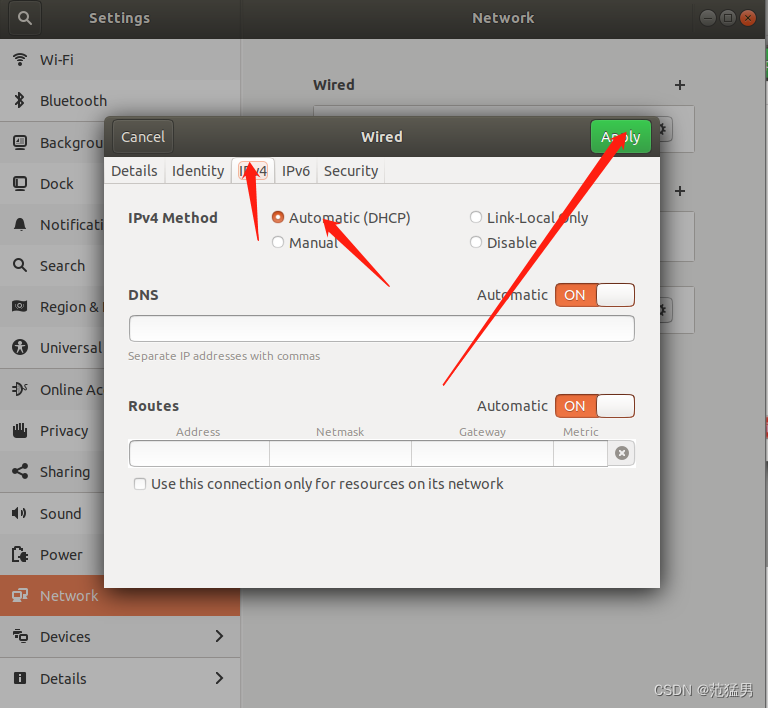
然后重启就OK了
现在sudo apt update就没有问题
2.编译rslidar源码
catkin_make
3.采集pcap文件
通过rsview上位机采集激光雷达的动态数据,得到pcap原始文件。
4,ros上回放pcap文件
在ros上,修改ros_rslidar中的rs_lidar_16.launch文件,回放pcap,修改内容如下:
<param name="pcap" value="your.pcap"/>
//your.pcap为第一步采集到的pcap包地址
然后,打开一个终端,输入如下命令,回放pcap数据:
roslaunch rslidar_pointcloud rs_lidar_16.launch
便可得到如下,显示为之前采集到的动态点云图:
在这里插入图片描述3,录制bag包
此时,第二步中的终端不要关闭。我们采用rosbag命令录制需要的bag包。
rosbag record -O mybag.bag /rslidar_points
这里我们只获取了/rsliar_points节点的数据,当然还可以获取更多的节点或者所有的节点数据,具体可查询rosbag record相关的命令。
5,将bag文件转换成pcd文件
到这一步时可以将之前打开的终端全部关了。接下来讲上一步获取的mybag.bag转换成pcd文件。
新建一个终端,打开ros主节点:
roscore
再新建一个终端,键入如下命令:
rosrun pcl_ros bag_to_pcd mybag.bag /rsliar_points ~/pcd_file
这里我们通过pcl_ros包将bag文件中的/rslidar_points节点生成对应的pcd文件。默认pcl_ros是安装的,如果提示缺少的话,请根据提示自行安装。
6,查看pcd文件
关闭所有终端。
上一步中获取的pcd文件是很多个,每一个pcd是一帧数据。可以通过pcl_viewer命令查看pcd格式的文件:
pcl_viewer yourname.pcd //键入对应的pcd文件名即可















 8337
8337











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









