










 本文详述了一位博主DIY一款12自由度四足机器人的过程,从结构设计、舵机选型到3D建模和有限元分析。博主对比了串联与并联机构,选择了前后膝式串联结构,并讨论了多种电机和舵机选项,最终采用大扭矩舵机实现。通过3D打印和软件优化,完成了结构设计,并进行了安全性分析。文章还展示了实物制作与行走展示,为四足机器人爱好者提供了宝贵的学习资源。
本文详述了一位博主DIY一款12自由度四足机器人的过程,从结构设计、舵机选型到3D建模和有限元分析。博主对比了串联与并联机构,选择了前后膝式串联结构,并讨论了多种电机和舵机选项,最终采用大扭矩舵机实现。通过3D打印和软件优化,完成了结构设计,并进行了安全性分析。文章还展示了实物制作与行走展示,为四足机器人爱好者提供了宝贵的学习资源。
文章目录
前言
随着科技进步,社会生产力迅猛发展,机器人行业得到了蓬勃发展,其中四足机器人发展迅速,被广泛应用。四足机器人是一个综合性极强的研究产物,它以机电一体化技术为主导,综合应用了单片机技术、液压、传感器等多方面的知识。四足仿生机器人具有高机动性,负载能力和适应能力强,可运用于物资运输、抢险救援等方面,具有广阔前景。由于制作电机狗需要高昂的成本。DIY自主设计制造一款舵机狗来学习研究四足机器狗的步态算法是一件性价比极高且很有意义的一件事。(此处复制粘贴的几句象征性的大白话,仪式感还是要有一点的)
本文就来详细介绍记录博主自主DIY的一款12自由度的舵机狗。从开始的结构设计,舵机选型,matalab进行步态算法的仿真曲线,trot,back, turn_left , turn_right , mark_time等多种运动步态的理论波形分析, stm32F103ZET6主控程序代码的编写 ,以及到最后机器狗落地行走的整个详细过程记录下来。( 不说废话了,纯纯干货献上,开吃!)
一、初步了解四足结构
通过查阅相关资料,我们把四足种类分为几种类型,按单条腿机械结构可分为并联机构腿与串联机构腿。按照四条腿的关节配置又可以分为4种结构布局,分别为前肘后膝式、前膝后肘式、前后肘式和、前后膝式。
原理:每个腿部由两个电机并联组成的双自由度五连杆机构,通过两个电机旋转不同角度来实现足端的任意点的移动,典型结构:武汉大学2019robocon比赛四足,如图所示。
优点:电机扭矩选型要求不高,可以实现低扭矩高弹跳能力,连杆刚度大、质量轻、响应速度快。缺点:腿部自由度较少,结构上不好再添加自由度,因而在一些场合下难以发挥灵活优势,需要解决连杆的连接问题,安全性低。
1.1.2串联机构
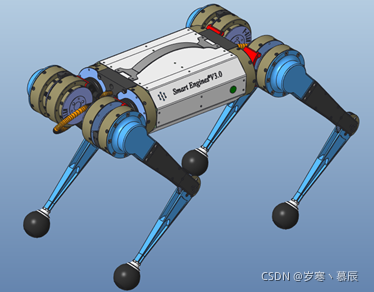
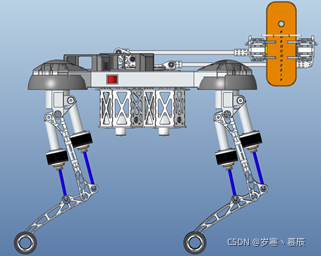
原理:每个腿部由两个电机串联组成的双自由度腿,通过两个电机旋转不同角度来分别实现大腿与小腿所旋转的角度,即大腿电机或小腿电机的旋转不影响小腿或大腿的旋转,结构事例:MIT开源四足模型,如图所示。
优点:外观上跟接近“狗”的生理形态,结构形式种类丰富,容易添加自由度,结构灵活简单,安全性可靠性高。缺点:电机扭矩选型要求高,需要大扭矩电机,电机一般有较大的减速比,因而普通的减速箱会有一定的间隙问题。
1.2 四足关节配置
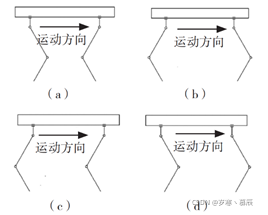
四足机器人的优点就是灵活性高,稳定性好,所以在设计结果时一定提前考虑好它的关节配置,找到最合适的结构,以免影响其运动的灵活性和稳定性。当前四足仿生结构不外乎以下4种:(a)前肘后膝式,(b)前膝后肘式,(c)前后肘式和(d)前后膝式,如图所示。这4种结构是常见的仿生结构,它们各有利弊,每一种结构都能设计出不同性能的四足机器人。
二、结构方案选择及舵机选型
2.1并联与串联机构的选型
由设计要求与外观以及制作四足的难易与成本问题,在结构与算法上二者难度没有太大的区别,从灵活程度与现有成熟方案上来看,我们优先考虑12自由度的串联四足结构。为此我们考虑了多套方案。
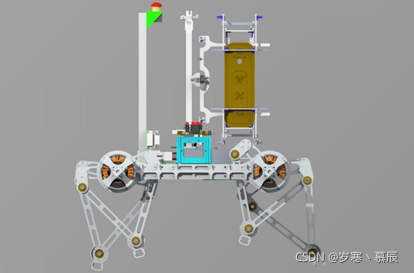
方案一:如下图所示此模型是我们之前准备设计制造一款电机狗设计的模型。采用同步带传动的串联四足结构,但由于电机扭矩太小,导致四足站立行走困难。我们同时也发现了一些同步带的缺陷,同步带的张紧问题比较复杂,容易在高载荷工况的情况下跳齿打滑,并且其响应速度以及精度问题可能不如连杆或丝杠,优点是将电机装在了髋关节附近,这就使腿的质量大大降低,从而加快其响应速度。
方案二:如下图所示,此模型为2019年的东北大学robocon四足模型,此四足采用了丝杠传动,传动精度较高,但针对现有的电机和丝杠参数来看,丝杠传动的缺点是其传动速度较慢,可能难以实现跳跃动作。
方案三:如下图所示,此模型为宇树科技的四足模型,其腿部是采用了连杆结构,将电机装在了髋关节附近,这就使腿的质量大大降低,从而加快其响应速度,并且连杆拥有较强的刚度,不会出现跳齿的情况。

方案四:如图2.6所示,此模型为苏黎世联邦理工学院(Eth)研制的一款四足机器人,其结构特点是将电机装在了关节处,优点是结构安装拆卸维修简单,但是其腿部的惯量大大影响了腿的响应速度,从而影响了其灵活性。

综合上述方案,我们采用连杆串联结构式四足机器人,其特点在于其强度大、腿的质量小响应速度快,精度高以及安装拆卸比较方便。
2.2 四足关节配置的选择
通过观察,包括很多前人对四足机器人结构的研究,我们可以知道前后膝式结构更符合猎豹、狗等动物的腿部结构,该结构外观精美,结构比较灵活,更容易实现跳跃、后空翻等高难度动作,因此我们采用此结构进行设计验证。
2.3 电机选型(有经济基础的建议尝试)
一直计划是要做一只电机狗的,在电机选型方面经过多次的调研比对和数据分析后还是选出了一款特别适合的电机,由于资金和老师沟通不到位等问题,最终还是选择先尝试制作的舵机狗。不过,关于之前电机选型的过程,还是给大家贴出来,供大家参考。
对于电机的选型,12自由度四足意味着电机数目多,因而我们优先看电机是否集成编码器与驱动,这样减少不必要的元器件所占的空间、质量问题,其次从电机扭矩、功率、转速等方面来考虑,我们设想四足质量约为16kg左右,大腿与小腿的长度均为200mm。计算可得大腿与小腿电机参数一样,四足从卧倒到起立所需最大扭矩约为8Nm,髋关节电机可以原则较小扭矩的电机,因而我们打算采用大疆3508电机加减速箱作为髋关节电机。
从宇树科技的A1机器狗了解到,宇树公司电机扭矩可达100Nm,其转速为20r/min,但该公司只出售电机扭矩为30Nm左右的电机,并且12个起购,预定时间太长。再后来我们看到麻省理工的四足采用的是海泰HT-03电机,该电机堵转扭矩为17Nm,因此我们查看了海泰HT-03电机,意外的发现一款更加适合做四足的电机——HT-04电机,该电机的堵转扭矩为35Nm,转速300r/min,无论是在完成基本的行走,还是完成跳跃以及空翻等高难度操作都绰绰有余。
海泰电机: HT-03电机参数:

HT-04电机参数:

2.4 舵机选型
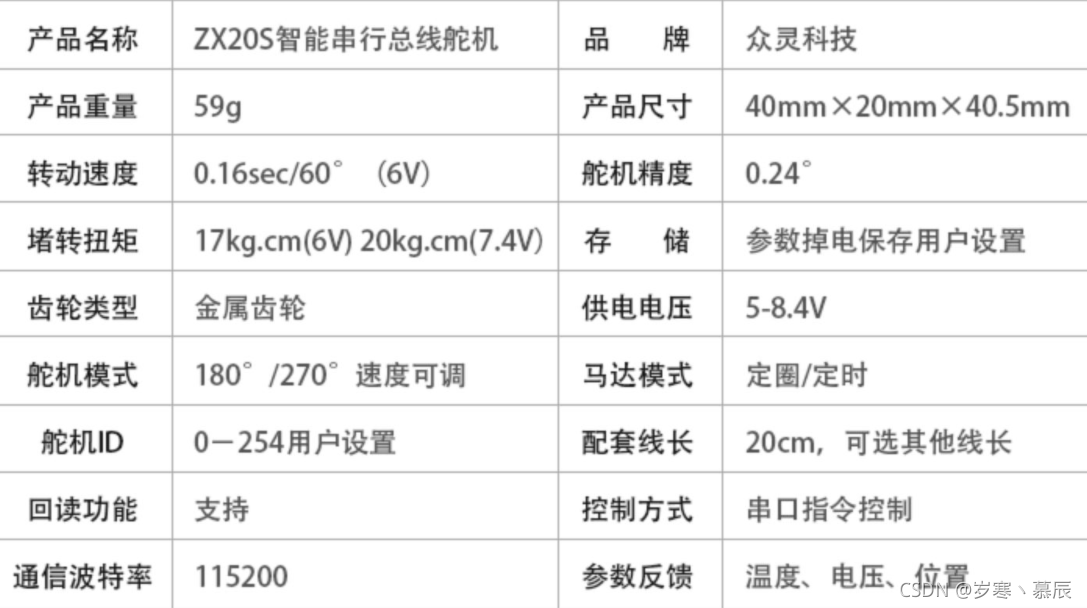
接下来就是我们最终实物制作采用的是众灵科技的一款大扭矩,性能较好的智能串行总线舵机(双轴)。下面为此款舵机的具体参数,经过数据分析,支撑行走完全没有问题的。基于研究四足步态算法的迫切心情以及时间经费有限等原因,我们就暂且先用这款舵机了。

三、结构设计3D建模及有限元分析
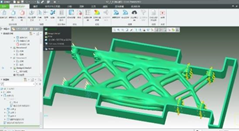
整体方案采用3D打印进行零件加工,耗材为pla,先通过creo进行建模,再通过Altair Inspire拓扑优化与creo创成式设计对模型结构载荷进行分析获得较好的优化方式,根据分析结果对模型用建模软件creo进一步修改。具体过程如下:
3.1小腿优化过程(拓扑优化)



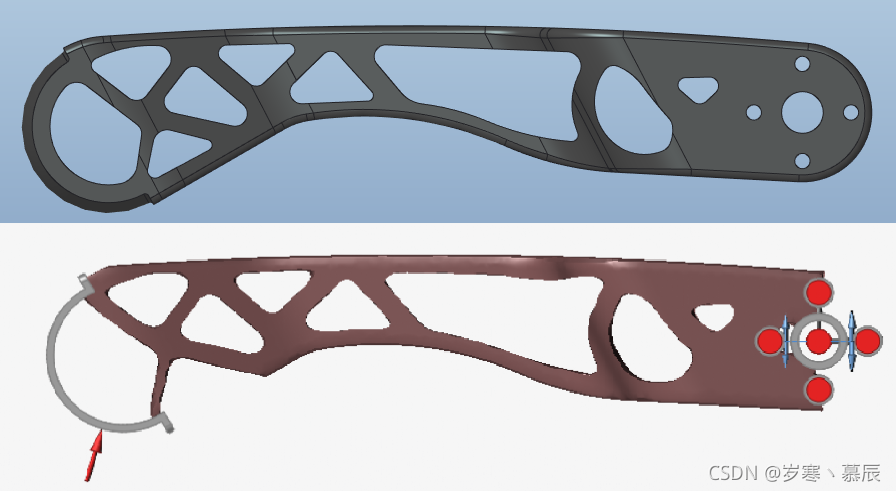
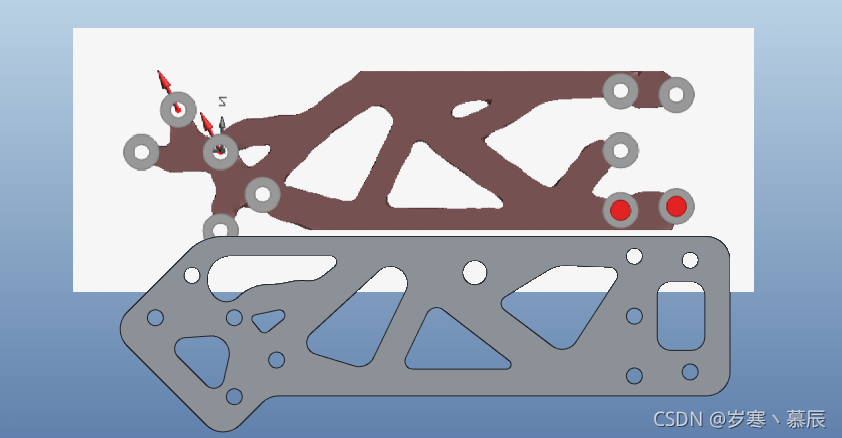
3.2大腿优化过程(拓扑+创成式优化)
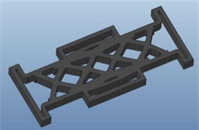
3.3身体优化(创成式设计)
3.4有限元分析
通过ANSYS Workbench进行有限元分析可得优化结果满足正常工作需求,并通过Altair Inspire进行有限元分析对比,得出两个软件分析结果相近,如下图所示(这里以小腿与大腿为例演示),并且分析其安全系数均远高于1.5,故此方案设计合理。
材料属性分析: 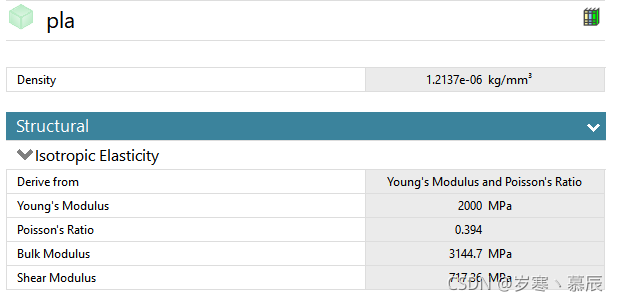
小腿应力分布云图(Ansys): 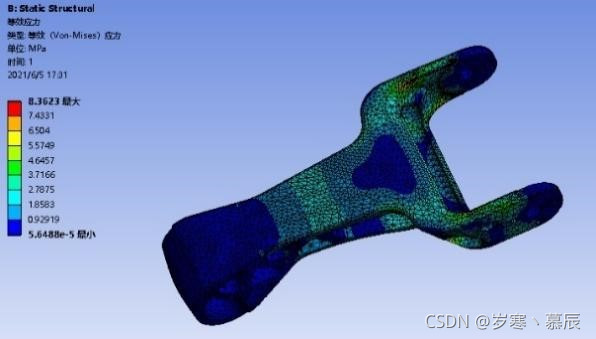
小腿变形云图(Ansys): 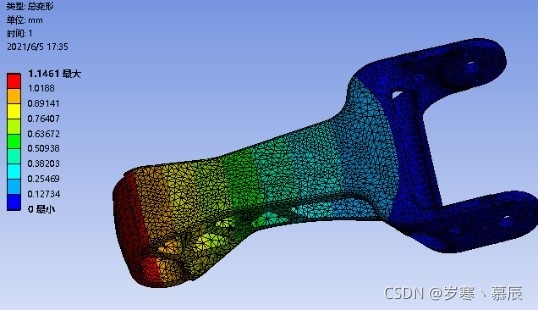
小腿应力分布云图(Inspire) : 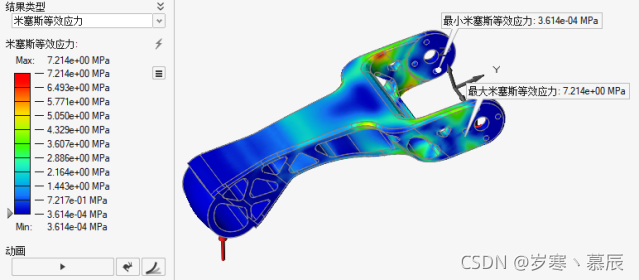
小腿变形云图(Inspire): 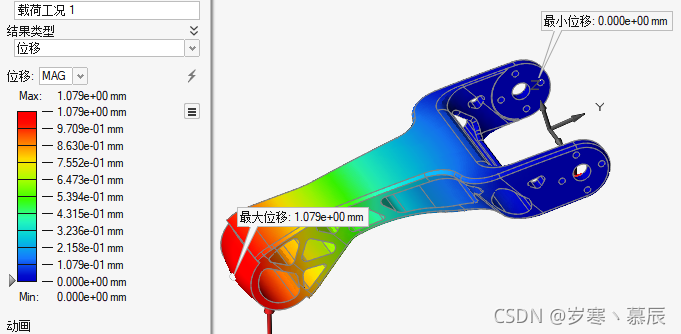
大腿应力分布云图(Inspire) : 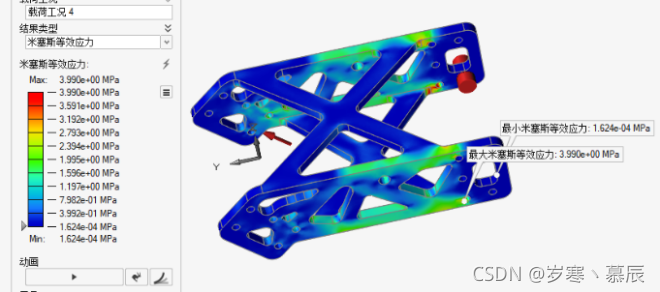
大腿变形云图(Inspire): 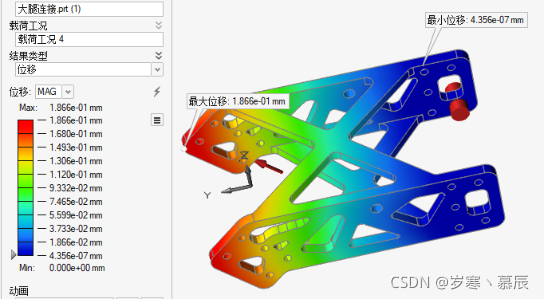
3.5安全系数分析
小腿安全系数: 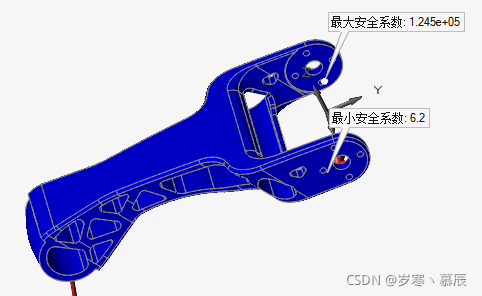
大腿安全系数: 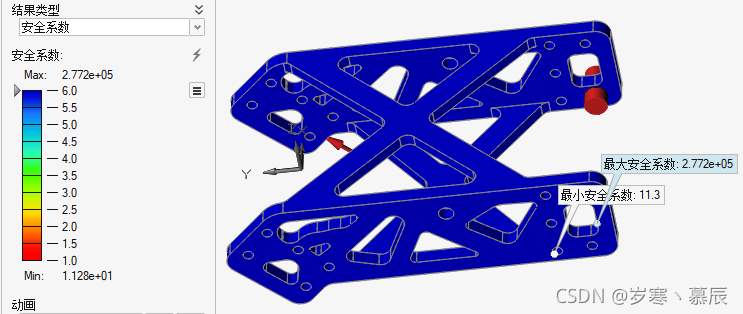
3.6三维设计图
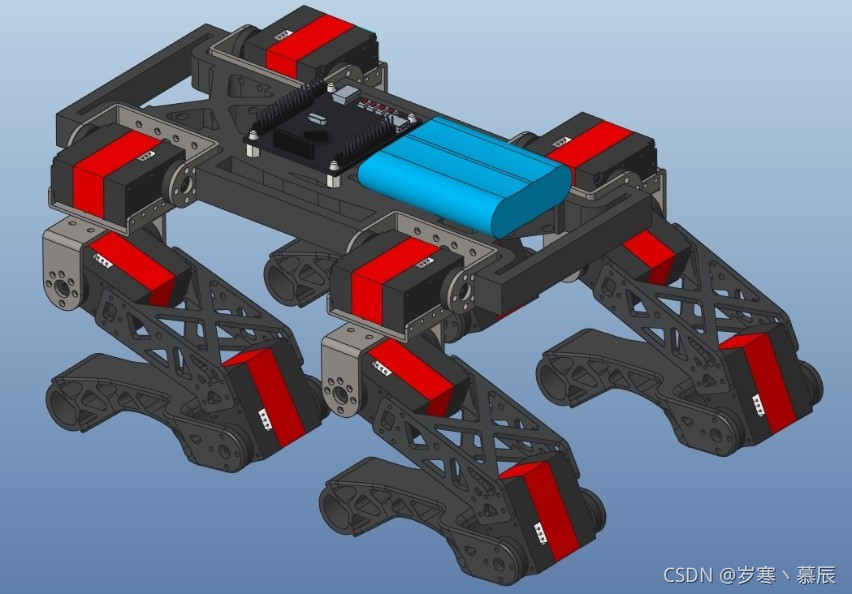
3.7实物展示


3.8实物行走展示
总结
由于经费以及研发成本较高,我们最终还是采用了总线舵机代替电机进行四足算法研究与验证,方案依然采用十二自由度串联前后膝式。设计方案采用3D打印进行零件加工,耗材为pla,先通过creo进行建模,再通过Altair Inspire拓扑优化与creo创成式设计对模型结构载荷进行分析获得较好的优化方式,得出了最终的结构图。
由于整个四足机器人的内容较多,本章节只是初步介绍了关于四足的一丢丢小知识以及我们自己DIY的这个四足狗结构设计的整个过程。后期会持续跟新四足步态算法的知识以及详细的代码都会贴出来的,欢迎各大佬留言私信提出建议,很希望能与大家一同学习探讨交流关于四足机器人的点点滴滴。
实物早在两个月以前已经制作完成,行走步态算法也已经测试完成。博主闲暇时间会详细的把整个制作过程记录下来,方便大家学习交流,与大家一起分享学习四足机器狗。持续更新中……


















 953
953

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











