







目录
前言
LQR悬架的最优性取决于加权矩阵Q、R的设计,然后不通过寻优算法进行设计很困难,完全是靠设计者的经验和试探进行权重设计。本文利用遗传算法的全局搜索能力,以悬架的性能指标为目标函数,利用遗传算法工具箱对LQR悬架进行设计。
这里我想理清一个问题,就是随机路面激励模型的生成方法,法一可以用wgn(m,n,p)函数产生高斯白噪声,其中m为行数、n为列数、p为噪声功率(方差σ^2);法二可以用simulink的Band-Limited White Noise模块,产生的是均值为0,方差为σ2的信号,其Parametes有3个参数:Noise power指功率谱密度PSD、Sample time指采样时间、Seed指随机数种子,其中功率谱密度、采样时间及功率的关系为功率p = 功率谱密度Noise power/采样时间Sample time,即:


默认状态下的Band-Limited White Noise模块
即默认状态下,其功率谱密度是0.1,功率为1,能量为10(如果理解错误欢迎指导)。因为每次迭代会运行模型一次,所以需要将扰动序列固定,这样才能在已知的集合里进行寻优,所以直接在simulink中加Band-Limited White%Noise模块报错,所以w为Band-Limited White Noise模块默认状态下产生的一组固定数据。
详细的理解可以参考以下博主链接:
Simulink —— Band-Limited White Noise模块的使用_罗伯特祥的博客-CSDN博客_simulink白噪声
1.悬架系统

2自由度悬架模型
微分方程:

取状态变量![]() ,有状态空间方程:
,有状态空间方程:

2.LQR控制器设计
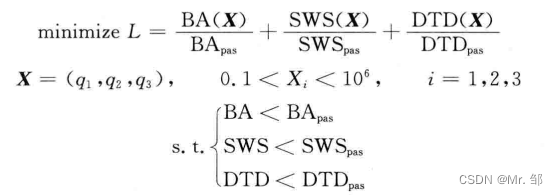
2.1性能指标

即

其中:

2.2适应度函数
由于性能指标单位及数量级不一致,因此除以相应的被动悬架性能指标,得到适应度函数:
2.3算法流程

3.MATLAB/Simulink仿真分析
3.1simulink模型

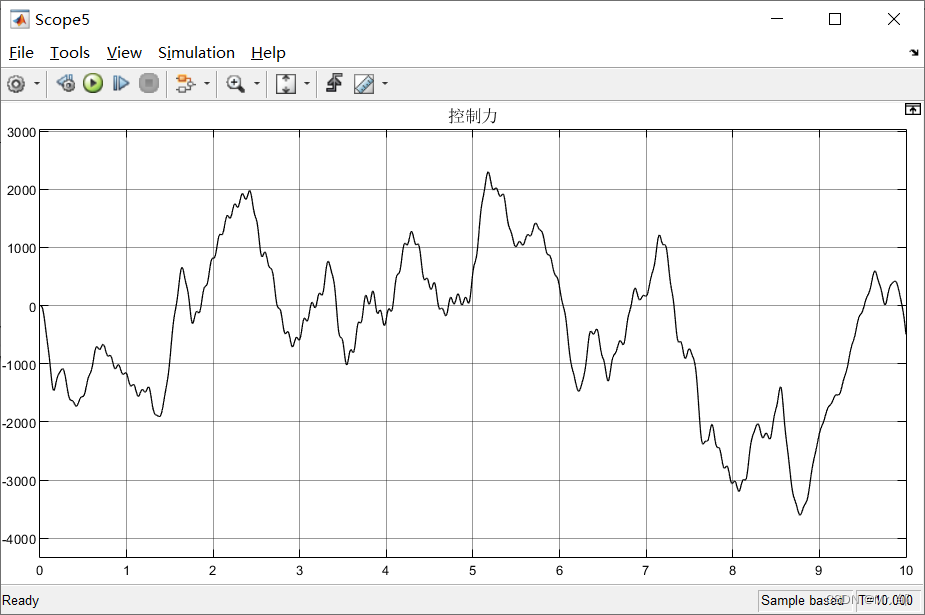
3.2结果分析
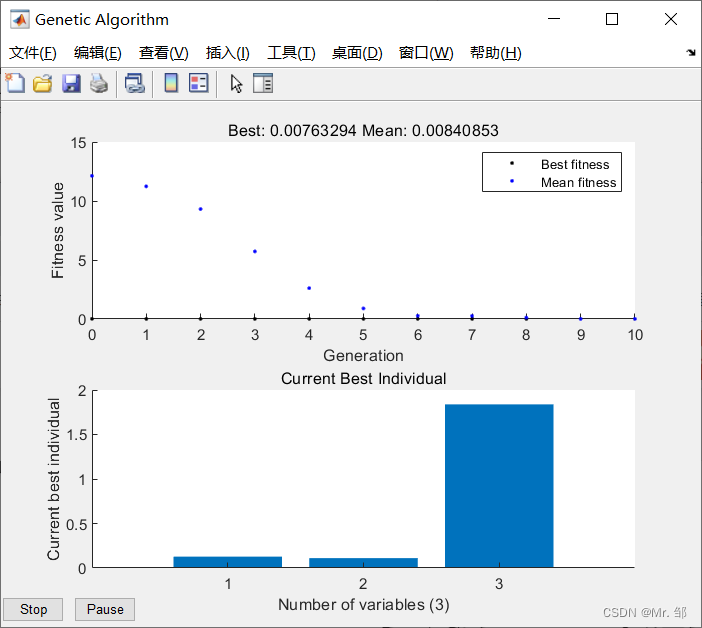
寻优过程
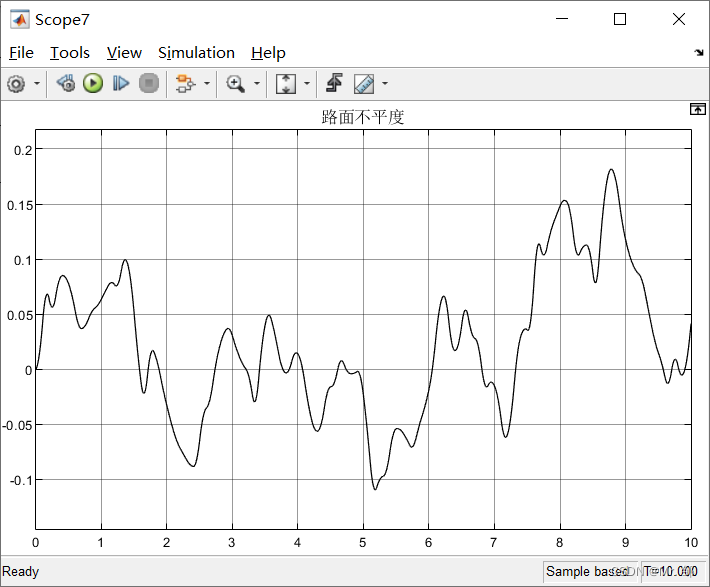
C级路面


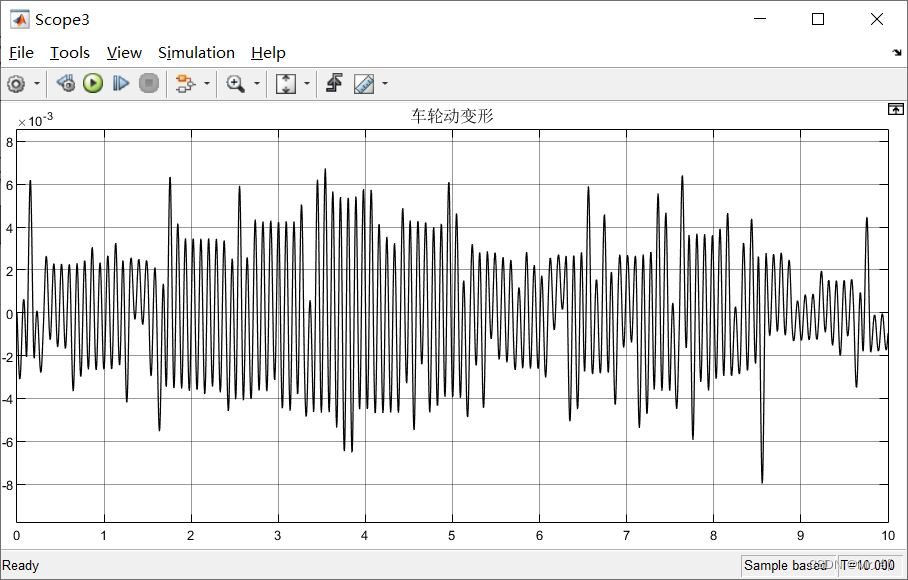
由于被动悬架没有阻尼所以,系统不会稳定下来,所以这里没有进行对比,本来想加上阻尼重新构造系统,但是仿真报错,可能对算法流程或者GA函数没有理解到位,后续有时间再进行更改。
注:仅为便利自己学习,错误在所难免,如有侵权,请联系删除,有兴趣的学者可以参考学习交流,谢谢!















 3849
3849











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











