






<?xml version="1.0" ?>
<robot name="ur5">
<!-- ********** KINEMATIC PROPERTIES (JOINTS) ********** -->
<joint name="world_joint" type="fixed">
<parent link="world"/>
<child link="base_link"/>
<origin rpy="0.0 0.0 0.0" xyz="0.0 0.0 0.0"/>
</joint>
<joint name="joint1" type="continuous">
<parent link="base_link"/>
<child link="link1"/>
<origin rpy="0.0 0.0 0.0" xyz="0.0 0.0 0.089159"/>
<axis xyz="0 0 1"/>
</joint>
<joint name="joint2" type="continuous">
<parent link="link1"/>
<child link="link2"/>
<origin rpy="0.0 1.570796325 0.0" xyz="0.0 0.13585 0.0"/>
<axis xyz="0 1 0"/>
</joint>
<joint name="joint3" type="continuous">
<parent link="link2"/>
<child link="link3"/>
<origin rpy="0.0 0.0 0.0" xyz="0.0 -0.1197 0.425"/>
<axis xyz="0 1 0"/>
</joint>
<joint name="joint4" type="continuous">
<parent link="link3"/>
<child link="link4"/>
<origin rpy="0.0 1.570796325 0.0" xyz="0.0 0.0 0.39225"/>
<axis xyz="0 1 0"/>
</joint>
<joint name="joint5" type="continuous">
<parent link="link4"/>
<child link="link5"/>
<origin rpy="0.0 0.0 0.0" xyz="0.0 0.093 0.0"/>
<axis xyz="0 0 1"/>
</joint>
<joint name="joint6" type="continuous">
<parent link="link5"/>
<child link="link6"/>
<origin rpy="0.0 0.0 0.0" xyz="0.0 0.0 0.09465"/>
<axis xyz="0 1 0"/>
</joint>
<joint name="ee_joint" type="fixed">
<origin rpy="-1.570796325 0 0" xyz="0 0.0823 0"/>
<parent link="link6"/>
<child link="ee_link"/>
</joint>
<!-- ********** INERTIAL PROPERTIES (LINKS) ********** -->
<link name="world"/>
<link name="base_link">
<inertial>
<mass value="4.0"/>
<origin rpy="0 0 0" xyz="0.0 0.0 0.0"/>
<inertia ixx="0.00443333156" ixy="0.0" ixz="0.0"
iyy="0.00443333156" iyz="0.0" izz="0.0072"/>
</inertial>
</link>
<link name="link1">
<inertial>
<mass value="3.7"/>
<origin rpy="0 0 0" xyz="0.0 0.0 0.0"/>
<inertia ixx="0.010267495893" ixy="0.0" ixz="0.0"
iyy="0.010267495893" iyz="0.0" izz="0.00666"/>
</inertial>
</link>
<link name="link2">
<inertial>
<mass value="8.393"/>
<origin rpy="0 0 0" xyz="0.0 0.0 0.28"/>
<inertia ixx="0.22689067591" ixy="0.0" ixz="0.0"
iyy="0.22689067591" iyz="0.0" izz="0.0151074"/>
</inertial>
</link>
<link name="link3">
<inertial>
<mass value="2.275"/>
<origin rpy="0 0 0" xyz="0.0 0.0 0.25"/>
<inertia ixx="0.049443313556" ixy="0.0" ixz="0.0"
iyy="0.049443313556" iyz="0.0" izz="0.004095"/>
</inertial>
</link>
<link name="link4">
<inertial>
<mass value="1.219"/>
<origin rpy="0 0 0" xyz="0.0 0.0 0.0"/>
<inertia ixx="0.111172755531" ixy="0.0" ixz="0.0"
iyy="0.111172755531" iyz="0.0" izz="0.21942"/>
</inertial>
</link>
<link name="link5">
<inertial>
<mass value="1.219"/>
<origin rpy="0 0 0" xyz="0.0 0.0 0.0"/>
<inertia ixx="0.111172755531" ixy="0.0" ixz="0.0"
iyy="0.111172755531" iyz="0.0" izz="0.21942"/>
</inertial>
</link>
<link name="link6">
<inertial>
<mass value="0.1879"/>
<origin rpy="0 0 0" xyz="0.0 0.0 0.0"/>
<inertia ixx="0.0171364731454" ixy="0.0" ixz="0.0"
iyy="0.0171364731454" iyz="0.0" izz="0.033822"/>
</inertial>
</link>
<link name="ee_link"/>
</robot>
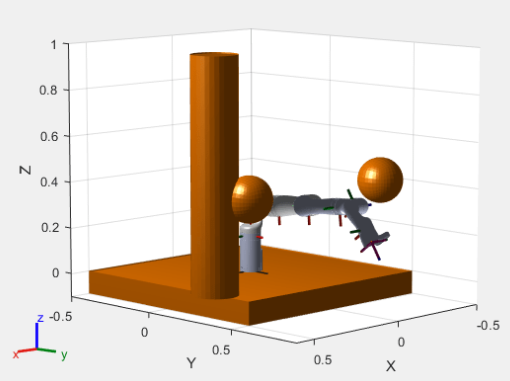
除了上述属性之外,URDF还可以描述机器人的其他属性,如其视觉外观(包括连杆的几何模型),以及可用于运动规划算法中的碰撞检测的连杆几何图形的简化表示。
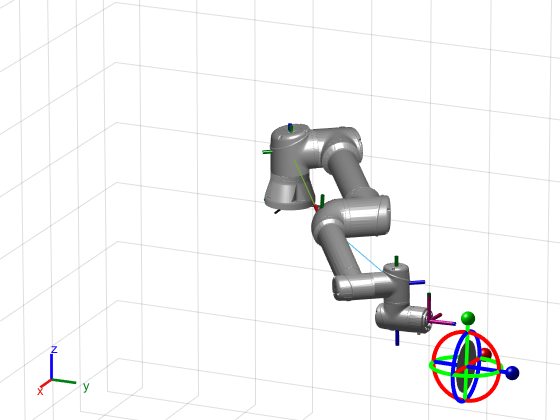
robot = importrobot('universalUR5e.urdf');
show(robot)
showdetails(robot)
figure(Name="Interactive GUI")
gui = interactiveRigidBodyTree(robot,MarkerScaleFactor=0.5);

















 1535
1535











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









