






协作机器人的应用场景包括以下几个方面:
- 制造业:协作机器人在制造业中的应用非常广泛,可以与人类工人一同工作,在重复性高、劳动强度大的任务中发挥重要作用。例如,在装配过程中,协作机器人可以与工人协作进行工,帮助完成繁重、重复性的工作,从而提高生产效率和品质。此外,协作机器人还可以用于物料搬运、零件检测和包装等环节,实现自动化生产线的建设,减少人力投入。
- 医疗保健:在医疗保健领域中,协作机器人也发挥着重要的作用。协作机器人可以协助医生进行手术操作,提高手术的精确度和安全性。同时,它还可以用于患者的病历管理、健康监测和康复训练等任务,为医疗保健提供更加全面和高效的支持。
- 远程安全和监控:协作机器人将在远程安全和监控领域带来一个振奋人心的机遇。此应用结合了各种不同的技术,包括移动机器人、传感和视频监控。协作机器人无需外部安全屏障,随着此类机器人的部署数目不断增加,从中受益的应用也日渐增多。如今,我们已看到了协作机器人给工业设置、复杂/危险应用、仓储和物流,以及安全和监控领域带来的明显益处。
- 复杂且危险的应用:协作型、复杂感测机器人不仅能够在操作员身边协作,还支持在难以部署传统机器人的复杂、危险应用场合中作业。在诸如喷涂或去除大型舰船的油漆等应用中,通常操作员通常面临各种危险,包括化学品和高空坠落。

UR 双臂协作机器人在有人环境中 作业

ABB
双臂协作机器人进行医疗康复作业
KUKA iiwa
协作机器人拖动示教作业

机器人
– 环境物理交互控制要 求机器人具有力感知能力!!
在传 统的操作任务中,机械臂末端的静态 接触力可以通过多维力传感器来测 量。但对于动态操作任务,末端执行 器的惯性力
/ 力矩对于末端力传感 器的测量精度有着不可忽视的影响。
研究具有全机身外力感知能 力的机器人系统并研究其柔顺控制 技术,对协作机器人的发展具有重
要的理论意义和应用价值。
外力感知的主要目的是测量或 估计机器人与环境之间的接触力。
具有谐波减速器的机器人外力感知 方法,利用机器人动力学特性和电机 反馈信息来估计外力。
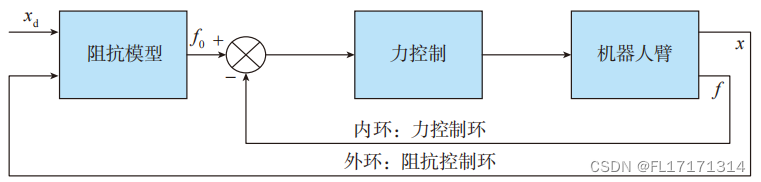
基于力控制的阻抗控制方案:
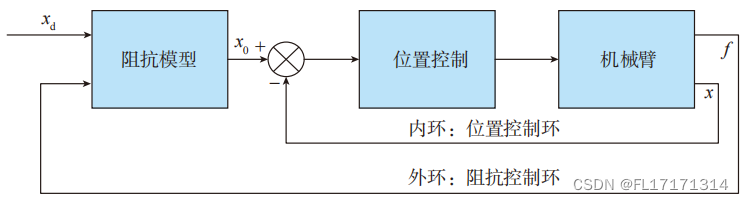
基于位置控制的阻抗控制方案:
阻抗控制可以实时调节 机器人系统的动态行为!!!
阻 抗控制能够调节交互作用点处的动 态行为,但是阻抗控制模型只是动态 行为控制的一种特殊情况。
一个典 型的例子是机器人 – 环境多点交互 控制问题。在多点交互中,每个接触 点处的交互行为不仅与该点的状态 有关,还与其他接触点的状态有关。
参考文献:
【1】Hogan, N. (1984, June). Impedance control: An approach to manipulation. In
1984 American control conference (pp. 304-313). IEEE.


















 1344
1344

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









