






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
利用随机有限集理论对蜂群的ILQR(线性二次型规划)和MPC(模型预测控制)控制进行研究是一种有效的方法,可以提高蜂群的控制性能和适应性。
随机有限集理论是一种强大的控制理论,它可以用于描述和处理不确定性系统。在蜂群控制中,蜜蜂的行为通常是不确定和随机的,例如蜜蜂在搜索食物时受到外界环境的影响。随机有限集理论可以帮助我们建立适应性控制方法,以应对这种不确定性。
ILQR和MPC是两种常用的蜂群控制方法。ILQR是一种基于优化的控制方法,它通过迭代地优化控制策略来实现系统的最优控制。而MPC是一种基于模型预测的控制方法,它通过在每个控制周期内预测系统的未来行为来优化控制策略。
利用随机有限集理论可以对ILQR和MPC进行增强,以考虑蜂群行为的不确定性。通过将不确定性建模为随机有限集,并结合ILQR和MPC的优化框架,可以优化蜂群控制策略的性能和鲁棒性。
综上,利用随机有限集理论对蜂群的ILQR和MPC控制进行研究可以提高蜂群控制的效果,使其更适应复杂和不确定的环境。这种方法可以在农业、环境保护和机器人领域等多个应用中发挥重要作用。
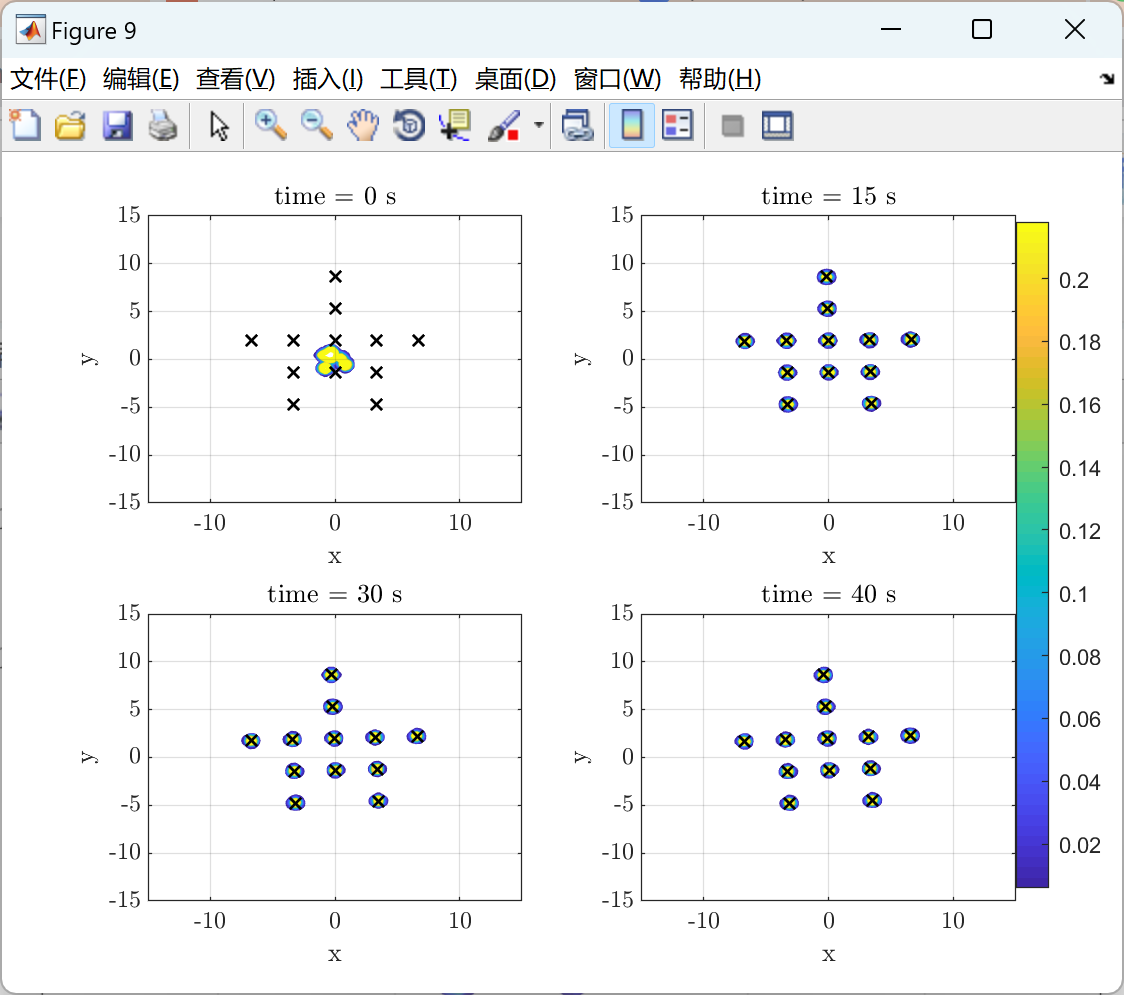
📚2 运行结果
2.1 算例1



2.2 算例2











2.3 算例3




部分代码:
%Switch between using an initial guess or initialize to zero for control
%input
u_ctrl=CWH_dyn_example(x0,xdes,t,dt,size_ctrl);
% u_ctrl=zeros(size_ctrl*size(x0,2),length(t));
%Plot surface plot of different distances
test_cost_shape(x0,xdes,size_ctrl,fh_cost)
%Determine ILQR Response
ilqr_script(x0,xdes,t,dt,u_ctrl,fh_cost,fh_cost_grad_hess,dist_name)
%Plot response
plot_map(x0,xdes,dist_name)
%Plot GM of ILQR response
contour_map(x0,xdes,dist_name)
%Plot control input and mass loss
mass_script(m0,t,x0,xdes,dist_name)
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]钟京宏.LQR和MPC控制器在泊车路径跟踪应用中的比较研究[J].时代汽车, 2020(15):2.DOI:CNKI:SUN:SDQE.0.2020-15-008.
[2]李波.基于随机有限集理论的VTS目标跟踪方法研究[D].大连海事大学,2016.
[3]曹潇男.基于随机有限集理论的检测前跟踪方法研究[D].西安电子科技大学,2014.DOI:10.7666/d.D551475.
















 373
373











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









