






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
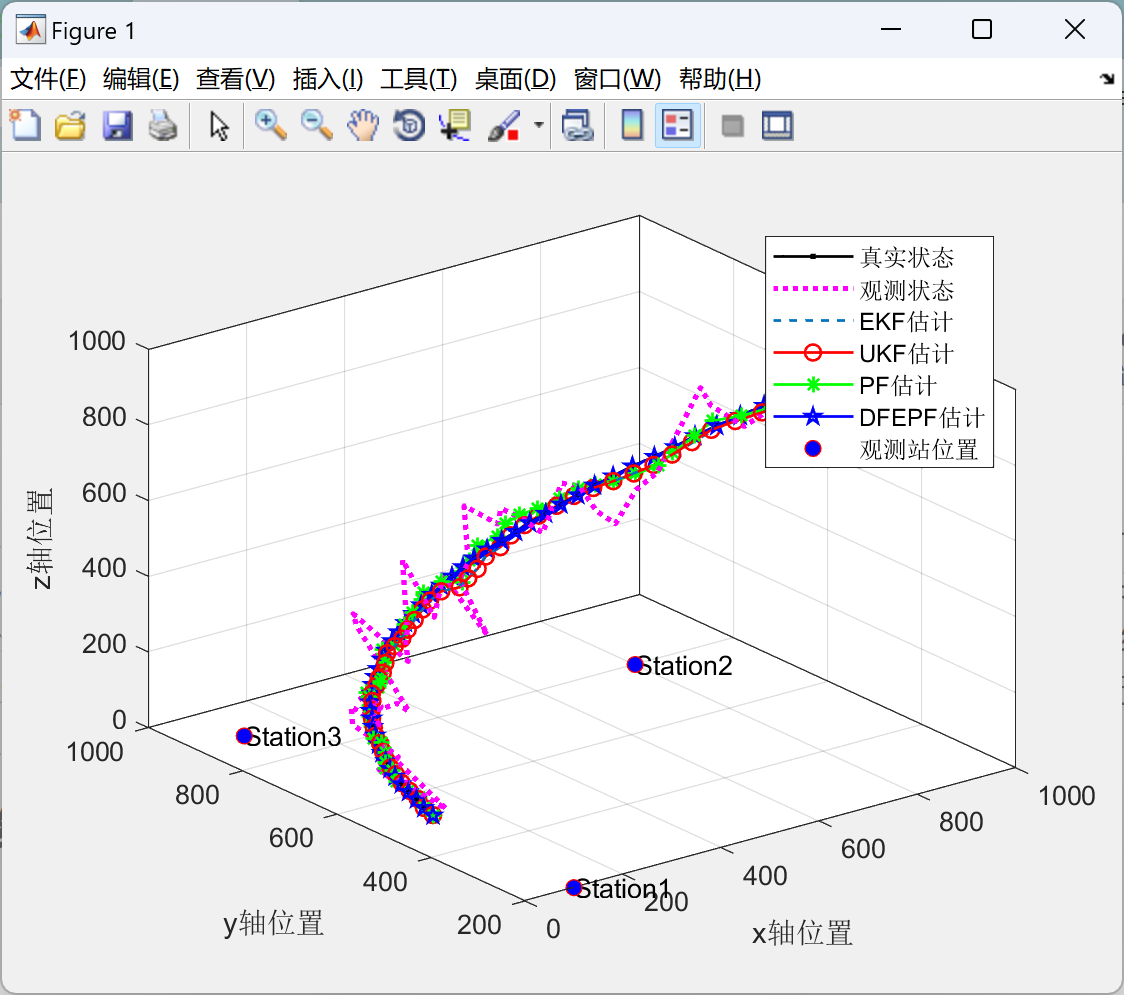
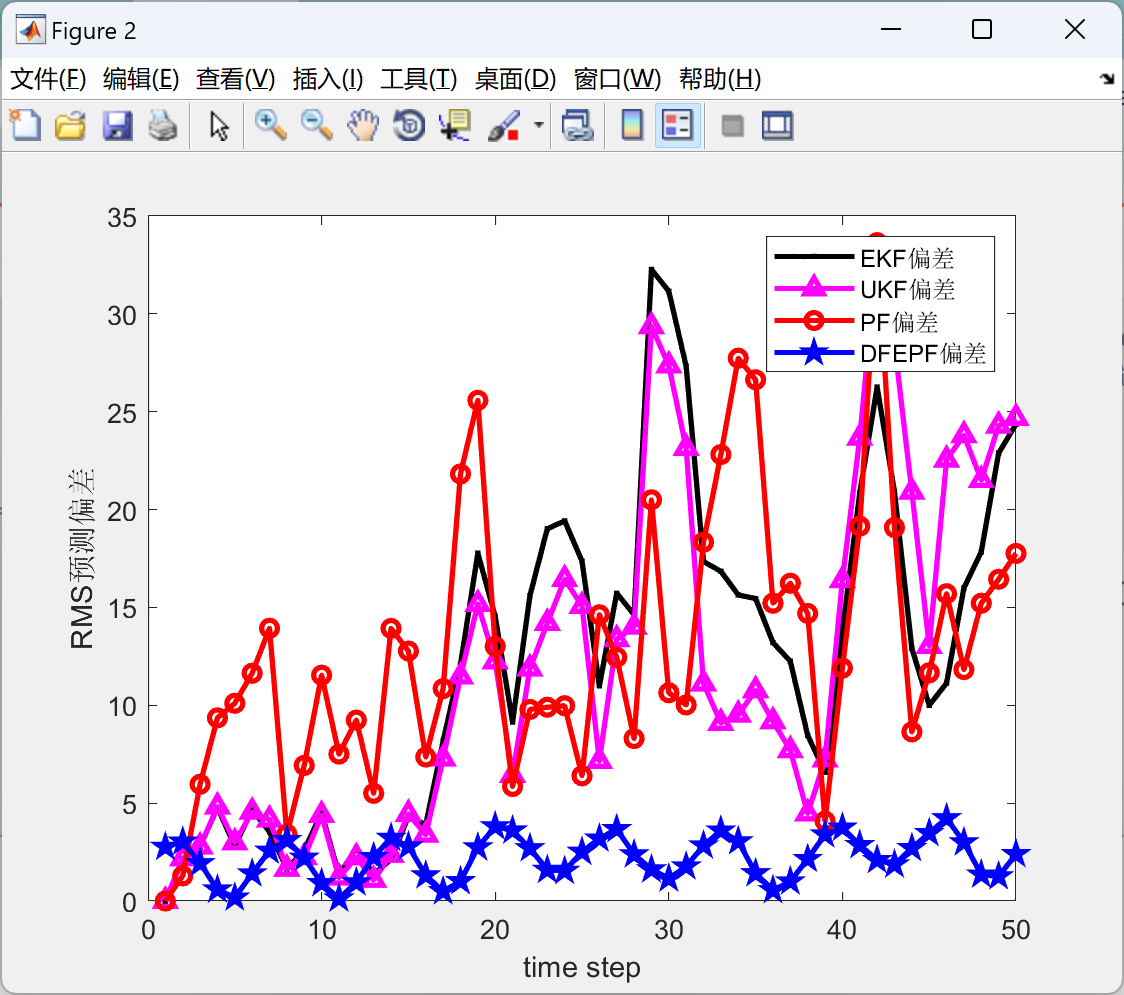
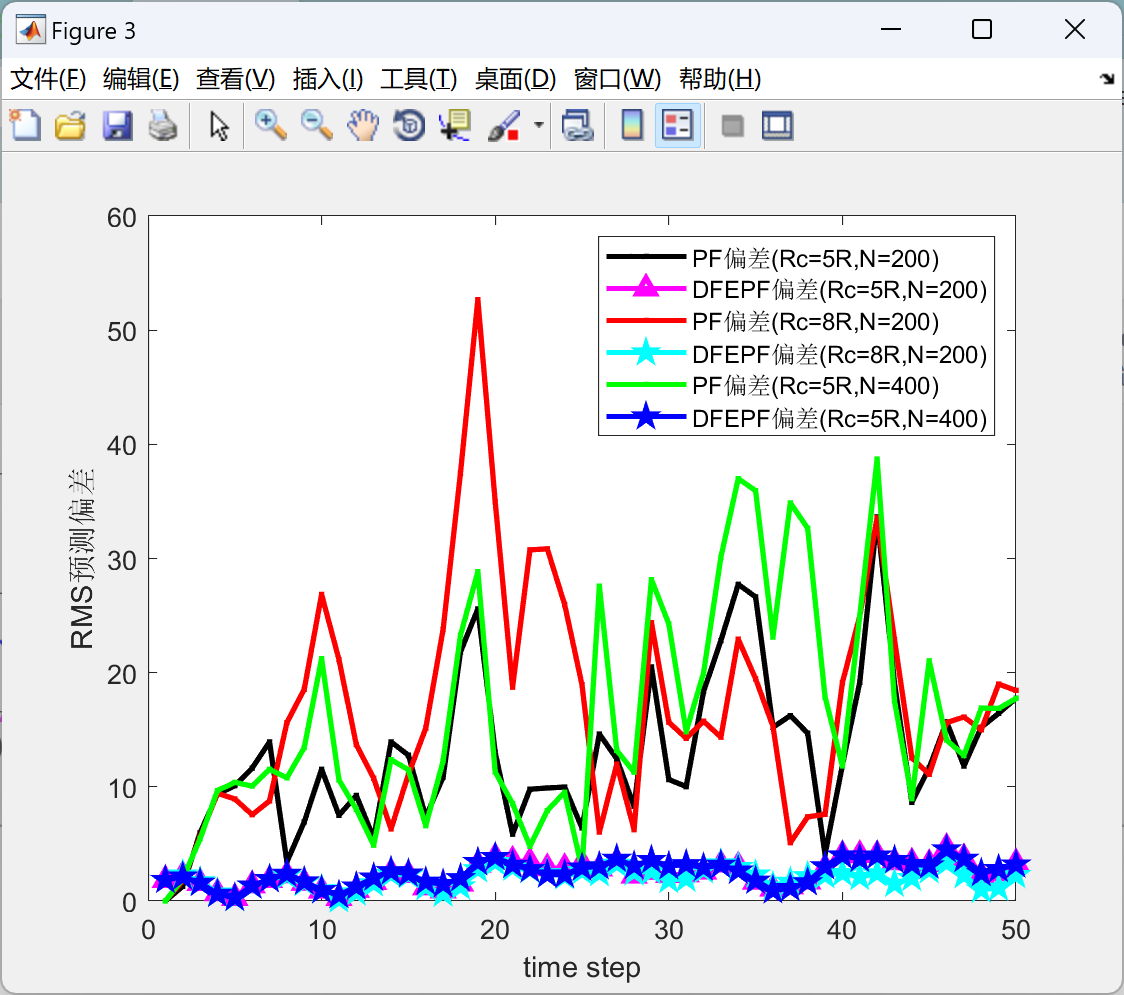
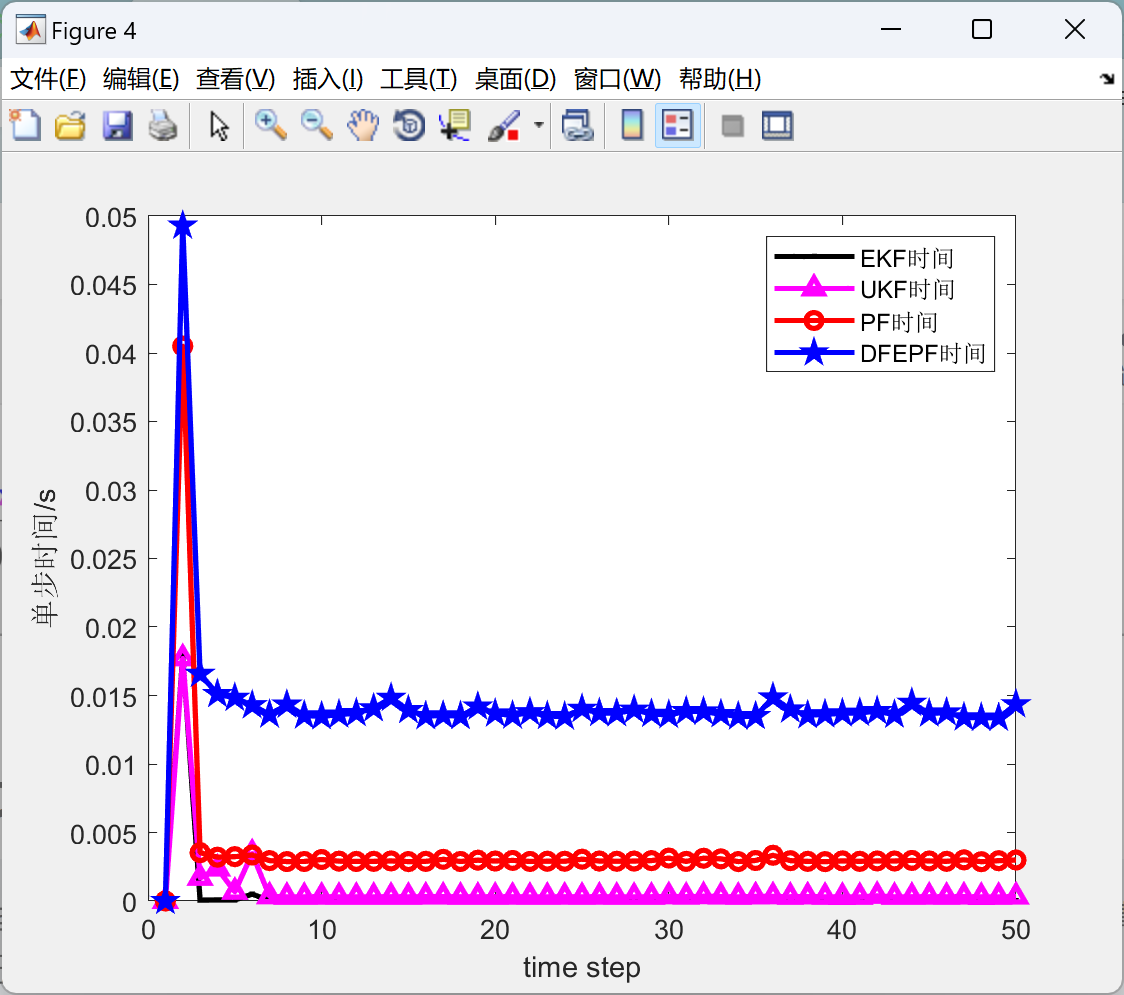
改进粒子滤波的无人机三维航迹预测方法是一种用于无人机轨迹预测的高效技术,它结合了粒子滤波算法和其他改进策略,以提高预测准确性和鲁棒性。:通过优化粒子的重新采样策略,如重采样时的权重更新规则和采样数量,可以改善滤波器的收敛性和稳定性。改进粒子滤波的无人机三维航迹预测方法通过结合粒子滤波算法和其他改进策略,实现了对无人机轨迹的准确、鲁棒和实时预测,具有广泛的应用前景,可在航空领域和其他相关领域中得到有效应用。
【预测】改进粒子滤波的无人机三维航迹预测方法研究,这一课题旨在探索和开发更为高效、精确的技术来预测无人机在三维空间中的飞行轨迹。粒子滤波(Particle Filtering,PF)作为一种递归贝叶斯估计方法,已经在诸多领域展现出其在处理非线性、非高斯分布问题上的优越性,尤其是在目标跟踪和状态估计方面。然而,标准粒子滤波算法在处理复杂动态环境和高维度状态空间时,可能会遇到样本退化、计算效率低下等问题。因此,对粒子滤波方法进行改进以适应无人机三维航迹预测的需求显得尤为重要。
研究内容可能涵盖以下几个方面:
-
自适应粒子重采样策略:研究并设计新型重采样算法(如系统性重采样、剩余重采样与随机重采样的结合,或采用局部最优重采样等),以减少样本退化现象,提高粒子有效性和预测精度。
-
多模型融合方法:针对无人机不同飞行状态(如起飞、巡航、转弯、降落等),结合多模型粒子滤波(MMPF)或交互式多模型粒子滤波(IMMPF),通过动态调整模型权重,更好地适应无人机动态变化的行为模式。
-
动态环境自适应机制:考虑到外界环境因素(如风速、气压变化)对无人机航迹的影响,引入环境感知模块,使粒子滤波算法能够实时调整状态转移概率,增强预测模型的环境适应性。
-
利用机器学习优化粒子初始化与重要性权重函数:运用深度学习技术预训练模型,辅助粒子的初始分布设置和重要性权重函数的设计,从而提高粒子集对真实状态的代表性和预测的准确性。
-
融合多传感器数据:整合GPS、惯性导航系统(INS)、视觉传感器等多种数据源,利用多传感器数据融合技术提高观测信息的完整性和可靠性,为粒子滤波提供更加丰富的状态观测信息,进一步提升航迹预测的精度和鲁棒性。
预期成果及应用前景:
该研究有望实现对无人机三维航迹的高精度、实时预测,提升无人机在复杂环境下的自主导航和避障能力,为无人机编队飞行、自动巡检、应急救援等应用场景提供关键技术支撑。此外,研究成果还能推广到其他需要高精度轨迹预测的领域,如自动驾驶车辆、航天器轨道预测等,具有广泛的应用价值和科研意义。
📚2 运行结果
主函数部分代码:
% 功能说明:ekf,ukf,pf,改进pf算法的无人机航迹预测比较程序
function main
% 因本程序涉及太多的随机数,下面让随机数每次都不变
rand('seed',3);
randn('seed',6);
% error('下面的参数T请参考书中的值设置,然后删除本行代码')
n = 9;
T = 50;
Q= [1 0 0 0 0 0 0 0 0; % 过程噪声协方差矩阵
0 1 0 0 0 0 0 0 0;
0 0 1 0 0 0 0 0 0;
0 0 0 0.01 0 0 0 0 0;
0 0 0 0 0.01 0 0 0 0;
0 0 0 0 0 0.01 0 0 0;
0 0 0 0 0 0 0.0001 0 0;
0 0 0 0 0 0 0 0.0001 0;
0 0 0 0 0 0 0 0 0.0001];
R = [5000 0 0; % 观测噪声协方差矩阵
0 0.01^2 0 % 角度的观测值偏差不能给的太大
0 0 0.01^2];
% 系统初始化
X = zeros(9,T); % 真实值
Z = zeros(3,T);
% 真实状态初始化
%X(:,1)=[1000;5000;200;10;50;10;2;-4;2]+sqrtm(Q)*randn(n,1);
X(:,1)=[100;500;20;10;50;10;2;-4;2]+sqrtm(Q)*randn(n,1);
state0 = X(:,1);
x0=0;
y0=0;
z0=0;
Station=[x0;y0;z0]; % 观测站的位置
P0 =[100 0 0 0 0 0 0 0 0; % 协方差初始化
0 100 0 0 0 0 0 0 0;
0 0 100 0 0 0 0 0 0;
0 0 0 1 0 0 0 0 0;
0 0 0 0 1 0 0 0 0;
0 0 0 0 0 1 0 0 0;
0 0 0 0 0 0 0.1 0 0;
0 0 0 0 0 0 0 0.1 0
0 0 0 0 0 0 0 0 0.1];
%%%%%%%%%%%%% EKF滤波算法 %%%%%%%%%%%%
Qekf = Q; % EKF过程噪声方差
Rekf = R; % EKF过程噪声方差
Xekf=zeros(9,T); % 滤波状态
Xekf(:,1)=X(:,1); % EKF滤波初始化
Pekf = P0; % 协方差
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]钟罡,周蒋颖,杜森等.基于航迹预测的无人机短时航迹偏离检测方法[J/OL].系统工程与电子技术:1-16[2024-03-17].http://kns.cnki.net/kcms/detail/11.2422.TN.20231216.1346.002.html.
[2]张铮,汪杰,倪西学.面向无人机数据采集的LoRa扩频因子预测模型研究[J].仪器仪表学报,2023,44(10):294-302.DOI:10.19650/j.cnki.cjsi.J2311741.















 603
603

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









