









1、电机的电角度和机械角的关系_电机电角度和机械角度的关系
电机的电角度和机械角的关系_电机电角度和机械角度的关系-CSDN博客
1、电角度/机械角
电角度是实际的空间几何角度。
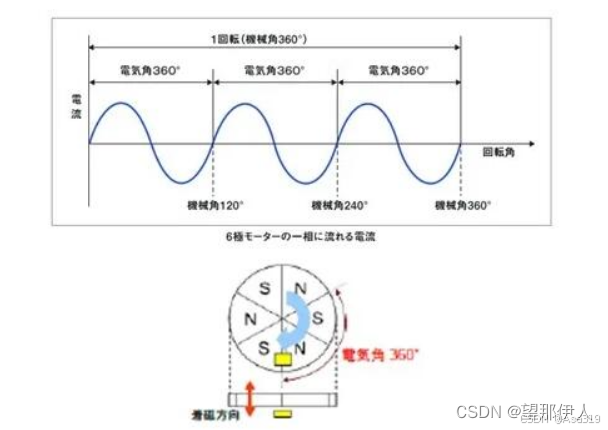
电机每对极在定子内圆上所占的角度360°/p指的是实际的空间几何角度,这个角度被称为机械角度。
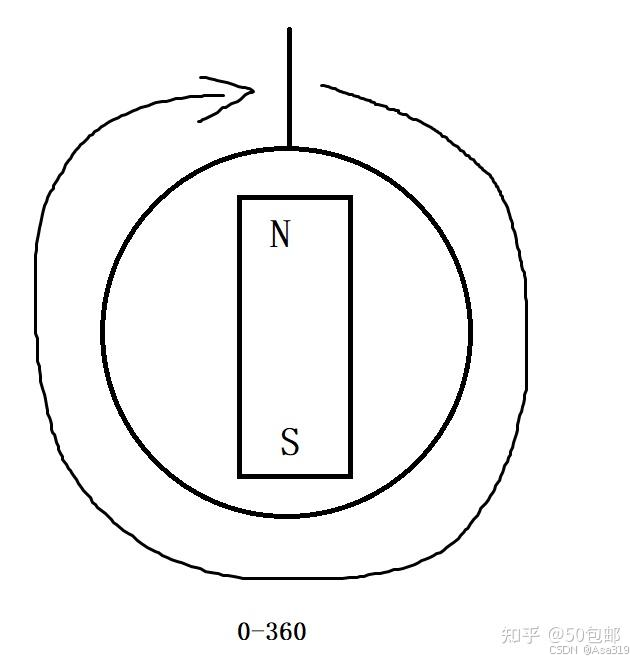
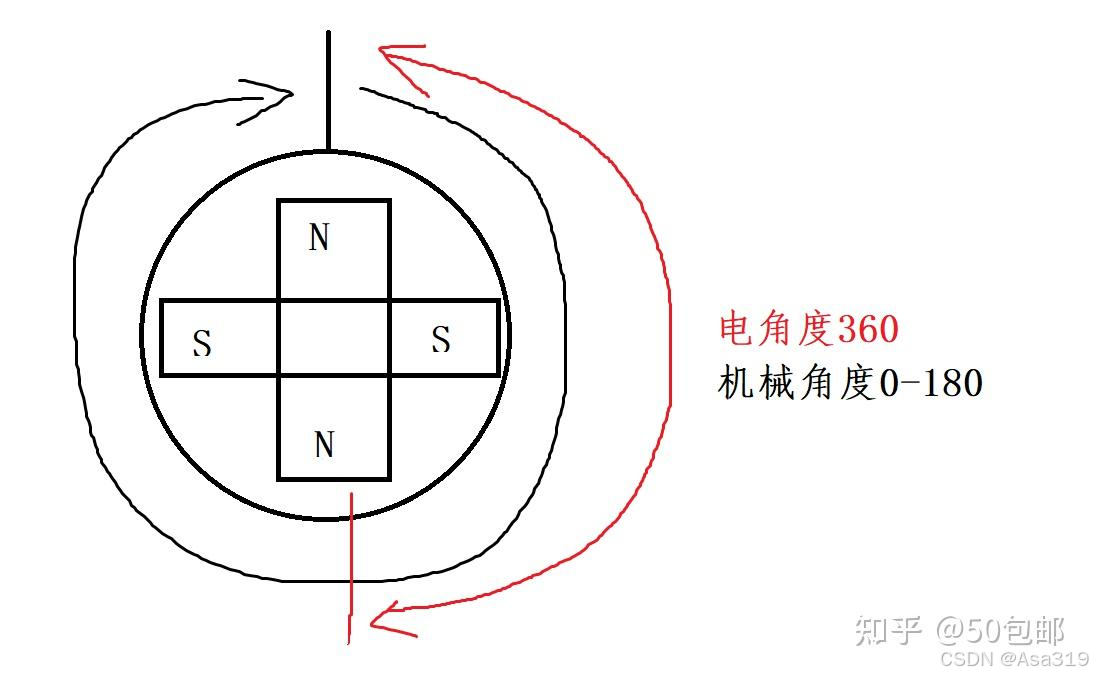
在四极及以上极数的电机中常常把一对极所占的机械角度定义为360度电角度,这是因为绕组中感应电势变化一个周期为360°。对于两极电机,其定子内圆所占电角度和机械角度相等均为360°;而p对极电机, 其定子内圆全部电角度为360°·p,但机械角度却仍为360°。所以二者存在以下关系:
- 电角度=机械角度×极对数
2、电角度测试原理及方法
常用的三相无刷直流电动机,一般有3个位置传感,输出波形有两种:一种是相位差60°电角度,另一种是相位差120°电角度。例如,1对磁极,相位差120°电角度,则3个位置传感器的空间间隔为120°机械角度;2对磁极,相位差为60°电角度,则3个位置传感器的空间间隔为30°机械角度。
直线电机在起动时,动子的位置具有不确定性。直线伺服系统中一般采用增量式光栅尺作为位置传感器,无法确定动子的绝对位置及电机的初始相位角。对于直线伺服系统一般还需要一个确定的机械零点;对于增量式系统,每次上电后都需要进行回零点操作,之后才能建立起坐标系统。
为了让直线电机有一个确定的机械零点,可以在直线电机端部安装一个接近开关,保证在接近开关能检测到的范围内光栅尺有一 个Z轴脉冲。将光栅尺的Z轴脉冲和接近开关的输出信号进行逻辑与,用此信号控制计数器的复位。系统上电后直线电机以一定的速度向零点运动,当系统检测到电机端部的Z轴脉冲时,计数器复位信号有效,计数器清零,此时电机所在的位置即为零点。
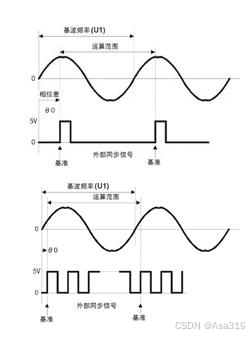
电机的机械零点确定以后,我们可以借助功率分析仪来测试电相角。如果在旋转信号输入中输入脉冲时将输入通道1-6的同步源设为EXT1和EXT2,则可查看以脉冲为基准的电压、电流相位变化。
2、电机电角度和机械角度的终极解
电机电角度和机械角度的终极解释(网络上没一个说清楚什么是电角度,我去墙上看到的解释,给力)_foc电角度和机械角度-CSDN博客
3、 永磁同步3相电机的电角度、机械角度和旋变标零
永磁同步3相电机的电角度、机械角度和旋变标零 - 知乎 (zhihu.com)
Summary:
1)机械角度是实际可测量的角度,电角度是人为设置出来的;
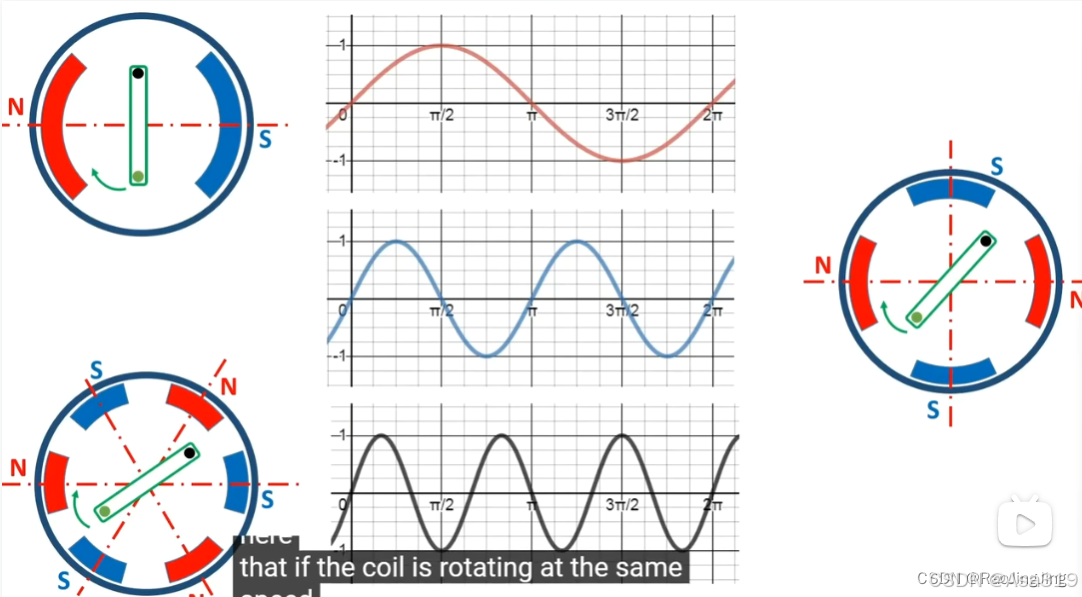
2)电角度2pi指的是AC信号完成一个周期,或者转子磁极从N-S-N;
3)电角度与机械角度的关系,与转子的极对数有关,与定子绕组的个数无关。
4)电机旋转时:定子磁极和转子磁极数时一样的。电机分为定子和转子,通过磁场进行持续的能量交换。根据电机理论,定子和转子的极数必须相等。转子是永磁体,极对数很好理解,是磁铁数的二分之一。
这里扩展一下:电气角度取决于转子的极对数,那么定子绕组的对数难道没有影响吗?
答案是没有,即使一个转子上可以有很多的绕组,比如一个三相的无刷电子,定子绕组可以是,6个,9个,12个等等,因为是三相,所以都是3的倍数,每一组就相当于一个磁极,定子磁极和绕组的磁极组合情况会有很多很多,
但是实际上并不是这样,不管你定子有多少个单独磁极,旋转一周的换向次数也还都是乘以6,原因很简单,不管多少组,终归还是三相,它们之间有相互关联,最终由三相的不同通电情况,只能有8种情况,去掉全为0或者1这种不产生电流的无效组合,只有6种情况。
因此无刷电机旋转一周的换向次数只与转子极对数(极数)有关,也就是电气角度只和转子极对数有关。


















 1873
1873

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









