







 超级会员免费看
超级会员免费看
赵虚左视频课程中代码并没有报错,实操发现错误
一、报错原因
1、/robot_state_publisher发布了左右轮到base_link的tf变换,但是/gazebo又发布了左右轮到base_footprint的tf变换,导致了二者的冲突。
2、分析后发现是map odom base_footprint这些坐标系发布的频率不一致导致的,比如odom更新快,base_footprint还没更新就会获取不到相对位姿的情况
二、改正
原luanch文件:
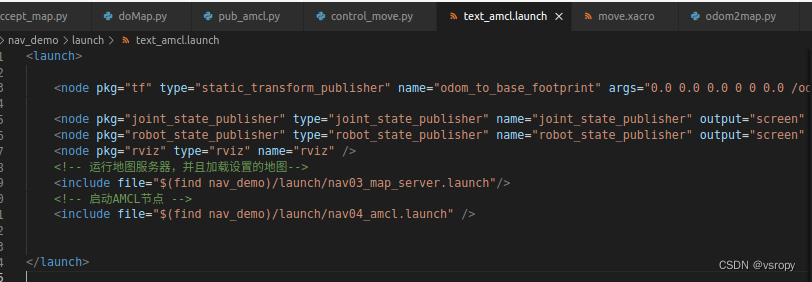
没有第一个node
1、launch中增加下段代码,保持频率10000hz一致:
<node pkg="tf" type="static_transform_publisher" name="odom_to_base_footprint" args="0.0 0.0 0.0 0 0 0.0 /odom /base_footprint 10000"/>
2、move.xacro文件修改下面三行
<publishWheelTF>false</publishWheelTF>
<publishWheelJointState>false</publishWheelJointState>
<updateRate>1.0</updateRate>

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 6995
6995











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











