






动力学分析的本质是对牛顿三定律(惯性定律、力和加速度关系、作用与反作用定律)的分析。
所以同样的
机器人动力学一般研究的是机器人各关节连杆的加速度、负载、质量以及惯量等相关问题。
力和力矩
首先简单回顾一下力和力矩的知识。为了使物体向前加速,就要对它施力,同样的使物体旋转产生角加速度则须施加力矩。相反附带着一定加速度或角加速度的物体将作用于其他物体上相应的力或力矩。
对于物体的质点力和力矩的关系式如下:
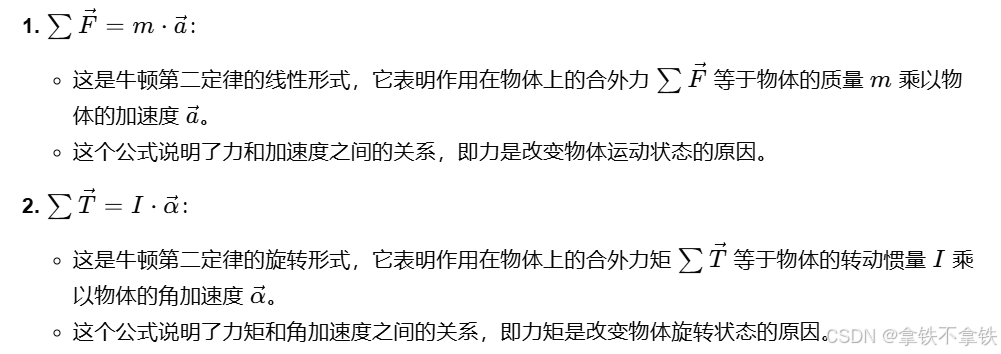
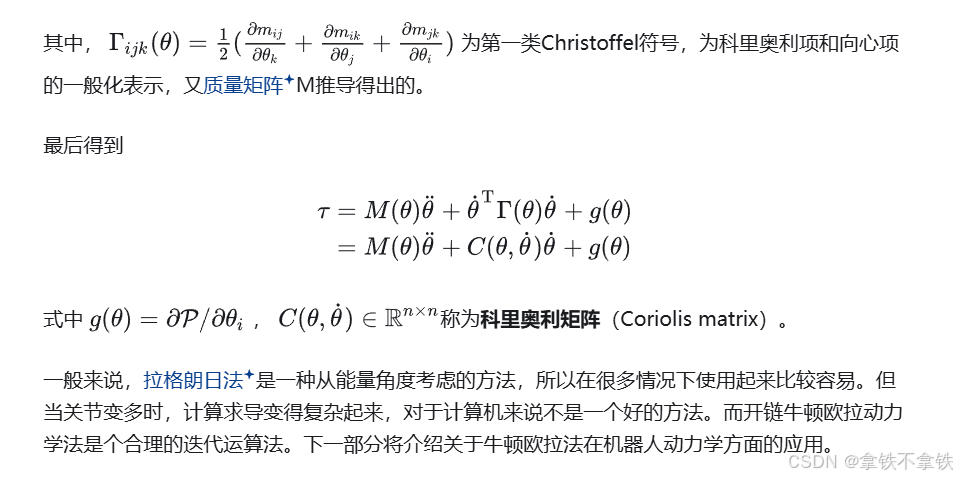
通常对上述力学分析方法称为牛顿-欧拉动力学分析法,也就是将动力学转换为一个静态力平衡分析的问题。在机器人领域,除了这种分析法,还有其他动力学分析法。例如,拉格朗日法、凯恩法等等。
拉格朗日力学分析法
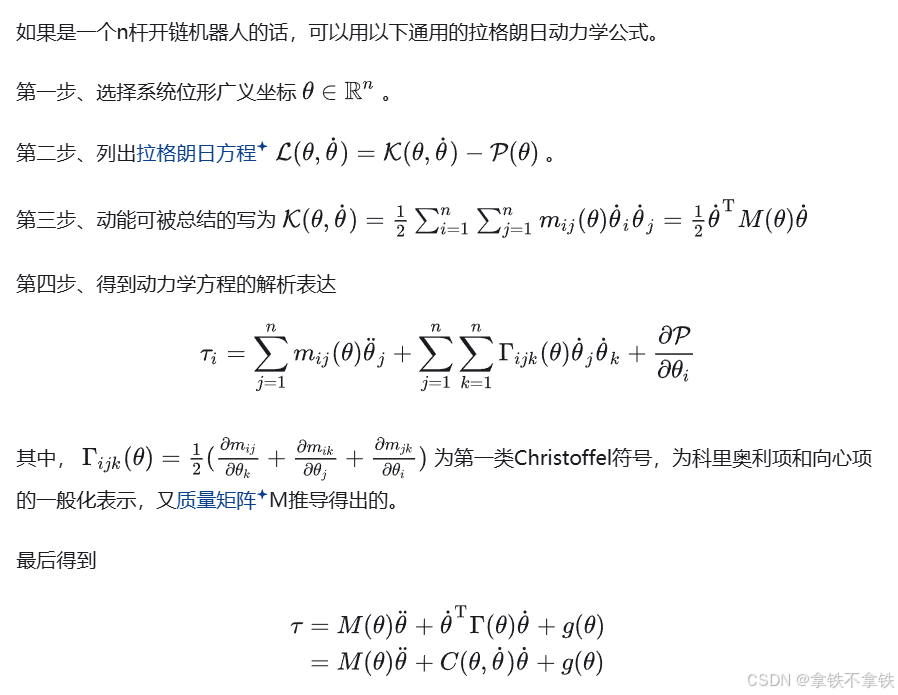
拉格朗日力学是基于能量项对系统变量及时间的微分的方法。将根据能量定义一个拉格朗日函数,

q为一组独立坐标来描述系统的位形,称为广义坐标。
其中L是拉格朗日函数,K是系统动能,P是系统动能。那么运动方程就可以用拉格朗日函数表示

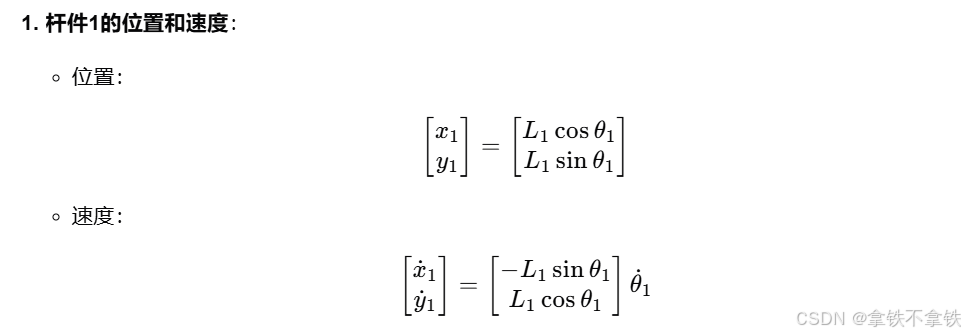
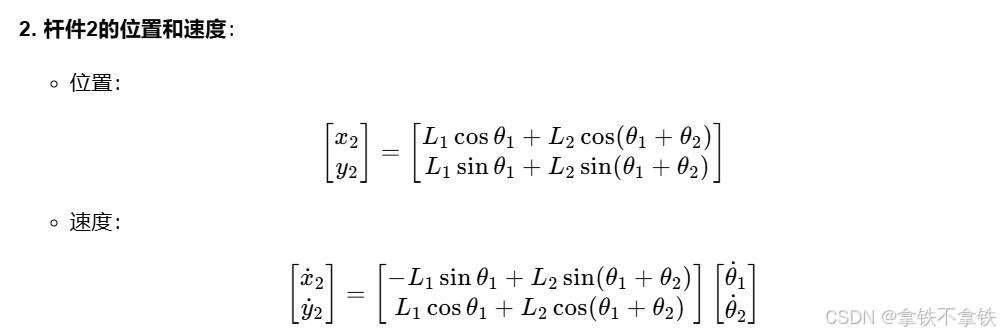
二连杆机构
先根据几何法求一下各个质点位置和速度

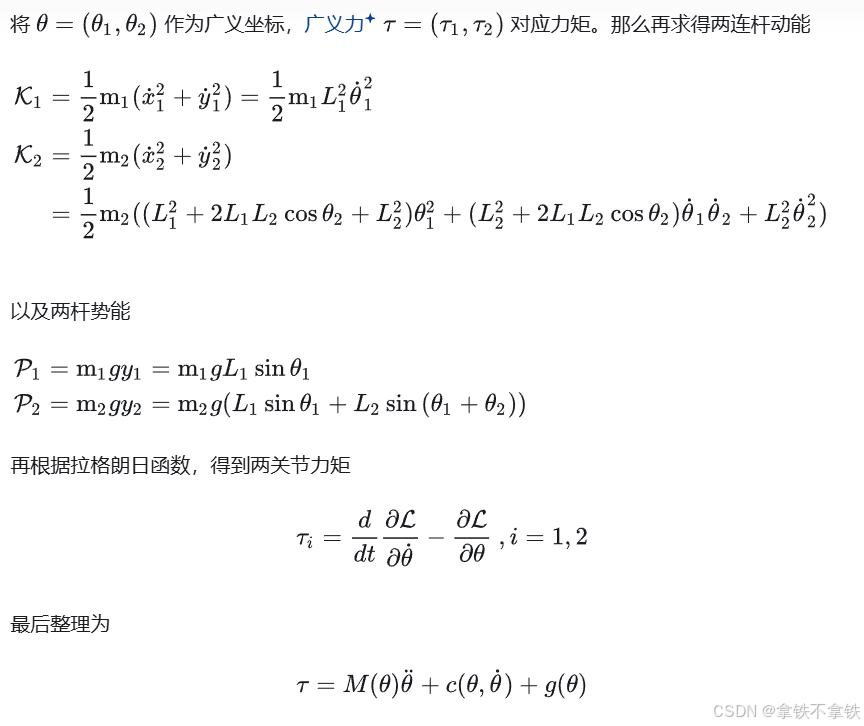
补充 动能公式:



















 3385
3385

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









