









作为角点检测的一种快速方法,FastCornerDetect算法比Harris方法、SIft方法都要快一些,应用于实时性要求较高的场合,可以直接应用于SLAM的随机匹配过程。算法来源于2006年的Edward Rosten 和 Tom Drummond的论文 “Machine learning for high-speed corner detection”,并在(在2010年再次被修订)新版本中再次被提出。
方法的官方网站:http://www.edwardrosten.com/work/fast.html
网站保存有各种语言和各个版本的源代码,可以直接编译运行。
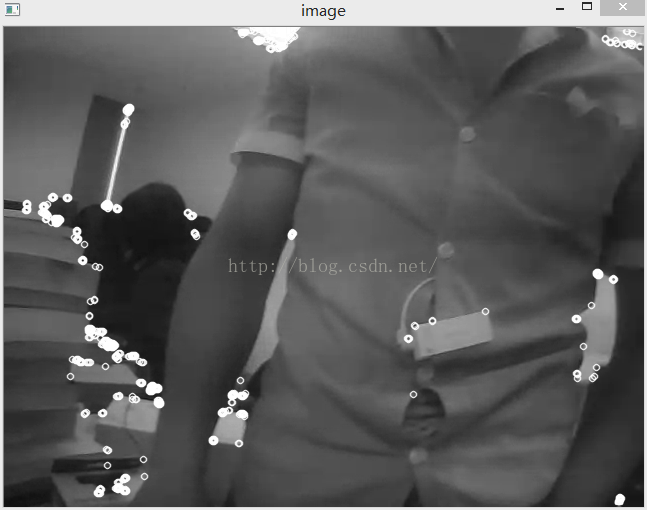
1. OpenCV Fast算法的运行结果和运行时间
检测结果:
cv::FastFeatureDetector fast( threshold , false ); //threshold ==20
fast .detect (image,keypoints);
检测消耗时间: 大约 3~20 毫秒
图像大小:479 x 359
2.算法分析
减小 cv::FastFeatureDetector fast( threshold , false ); //threshold ==20
的阈值可以检测更多的角点。
时间上不会有太大的变化...















 399
399

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









