








会议:CVPR 2017
标题:《Deep MANTA: A Coarse-to-fine Many-Task Network for joint 2D and 3D vehicle analysis from monocular image》
论文链接: https://arxiv.org/abs/1703.07570
本文仅作为个人学习笔记分享,图片来自于论文,如有侵权,请联系删除。
主要思想
提出了一种新的方法Deep MANTA(Deep Many-Tasks),通过一张图片完成多项车辆分析任务,包括车辆检测、局部定位、可视化特征描述以及3D估计。基于coarse-to-fine object proposal 提升车辆检测效果。并且,Deep MANTA网络可以检测出半遮挡的车辆。 在推断过程中,网络的输出作为一个鲁棒的实时位姿估计算法的输入,来进行姿态估计和三维车辆定位。

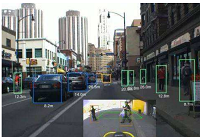
图1是系统输出。
图1的上部分是二维的车辆包围框、部件定位和部分可视化。红色的点代表可视部分,绿色的点表示遮挡部分,蓝色的点表示被自身遮挡的部分。
下部分是三维车辆包围框和三维车辆局部定位。
系统架构

图2 系统架构
整个系统由两部份组成。第一部分,第一部分是将输入图片输入 Deep MANTA network 来生成 2D scored bounding boxes,associated vehicle geometry( vehicle part coordinates ,3D template similarty ) 和 part visibility properties.
第二部分是推理部分,使用 Deep MANTA network 的2D输出和 3D 车辆数据集来恢复 3D 方向和定位。
3D形状和模板数据库
使用一个具有 M 个车辆类型(Sedan,SUV,etc)的 3D model. 每一个 3D model上标记 N 个顶点(称为 3D parts)。3D shape 定义为 3D 空间中所有 part 的坐标的集合。3D template 是一个3D model 对应的长宽高。如下图所示

2D/3D车辆模型

Semi-automatic annotation 是一个为 Deep MANTA 网络提供标签(vehicles part coordinate , part visibility , 3D template)的半自动化标注过程。这个过程只需要一个具有 3D bounding box 的真实数据集和一个 3D CAD 数据集。 这个 CAD 数据集具有 M 个 3D car ,人工的在每一个 model 上标注 N 个顶点。使用最相近的 3D bounding box 来匹配真实数据集的车辆和 3D CAD 的model. 被选择的 CAD 的 3D parts 将会投射到真实图片上来得到 2D part coordinates. 2D part 的可见性使用可见性网格计算。过程如下图

实验:
在 KITTI 数据集上评估方法,KITTI数据集包括 7481 个训练图片和 7518 个测试图片,同时还提供了校准矩阵。但是测试图片的 groundtruth 并没有给出,所以在训练集中提取出部分作为测试集。使用一个具有 103 个 3D model 的 CAD 数据集来进行半自动标注。使用 VGG 或者 GoogLenet 结构,ImageNet 初始化,RPN 具有 7 aspect ratios 和 10 scales。训练中,object proposal 如果和 groundtruth 重合大于 0.7 视为正例。所有的规范化参数 λ ,除了part localization task 设置为3 其他都设为 1。
2D vehicle detectionand orientation:
比其他的方法快,因为许多方法都是将 KITTI 数据集的图片放大 3 倍进行训练。下面的表格展示了特征层的选择,第一层优于第五层,本文的方法最优。

实验中展示了Deep MANTA方法比其他的单目的state-of-the-art方法在车辆检测,三维定位和姿态估计等几个方面效果要好。实验是在KITTI数据集上进行的。















 544
544

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









