







基于滑动窗的紧耦合后端非线性优化:将视觉约束、IMU约束、闭环约束放到一个大的目标函数中进行非线性优化,求解出滑动窗口中所有帧的PVQ、bias等。
在视觉约束和IMU约束中,基本思想是找到优化状态向量,然后通过视觉残差和IMU测量残差分别对状态向量求导,获得视觉和IMU预积分的Jacobian和协方差矩阵。
一、VIO残差函数的构建
 1、需要优化的状态向量:
1、需要优化的状态向量:
状态向量包括滑动窗口内的所有相机状态(位置P、旋转Q、速度V、加速度偏置ba、陀螺仪偏置bw)、相机到IMU的外参、所有3D点的逆深度:
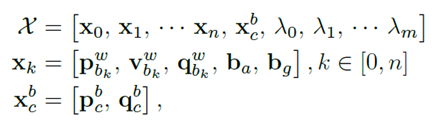
第一个式子是滑动窗口内所有状态量,n是关键帧数量,m是滑动窗内所有观测到的路标点总数,维度是15*n+6+m。特征点逆深度为了满足高斯系统。
第二个式子xk是在第k帧图像捕获到的IMU状态,包括位置,速度,旋转(PVQ)和加速度偏置,陀螺仪偏置。
第三个式子是相机外参。
注意:xk只与IMU项和Marg有关;特征点深度也只与camera和Marg有关;
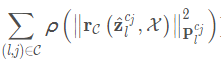
2、目标函数为:

视觉惯性BA:这三项分别为边缘化的先验信息、IMU的测量残差、视觉的重投影误差
BA优化模型分为三部分:
1、Marg边缘化残差部分(滑动窗口中去掉位姿和特征点约束)代码中使用Google开源的Ceres solver解决。
2、IMU残差部分(滑动窗口中相邻帧间的IMU产生)
3、视觉误差函数部分(滑动窗口中特征点在相机下视觉重投影残差)

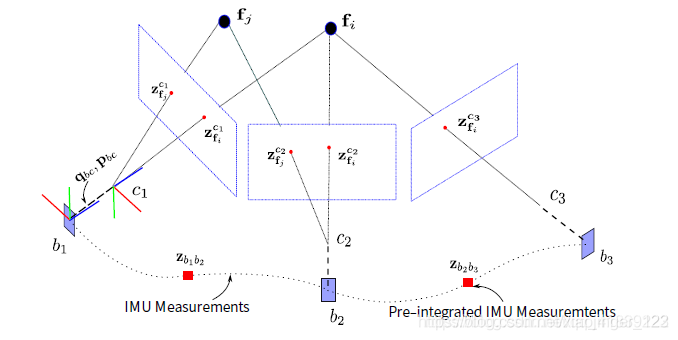
二、视觉约束
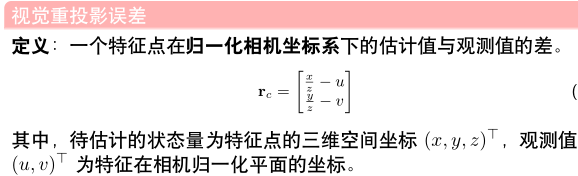
这部分要拟合的目标可以通过重投影误差约束,求解的是对同一个路标点的观测值和估计值之间的误差,注意是在归一化平面上表示。(视觉测量残差就是重投影误差,定义为一个特征点在归一化相机坐标系下的估计值与观测值的差。估计值即特征点的三维空间坐标(x,y,z)^T ,观测值为其在相机归一化平面的坐标。)
1.视觉重投影误差residual(归一化平面)
相关自变量是:该路标点被两帧观察到的相机帧位姿、Cam和IMU之间相对位姿、路标点在第一帧的逆深度。
 当某路标点在第i帧观测到并进行初始化操作得到路标点逆深度,当其在第j帧也被观测到时,估计其在第j帧中的坐标为:
当某路标点在第i帧观测到并进行初始化操作得到路标点逆深度,当其在第j帧也被观测到时,估计其在第j帧中的坐标为:
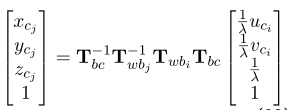
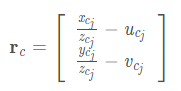
此时的视觉残差为:(左侧为根据i帧反推估计的位置,右侧为观测值)
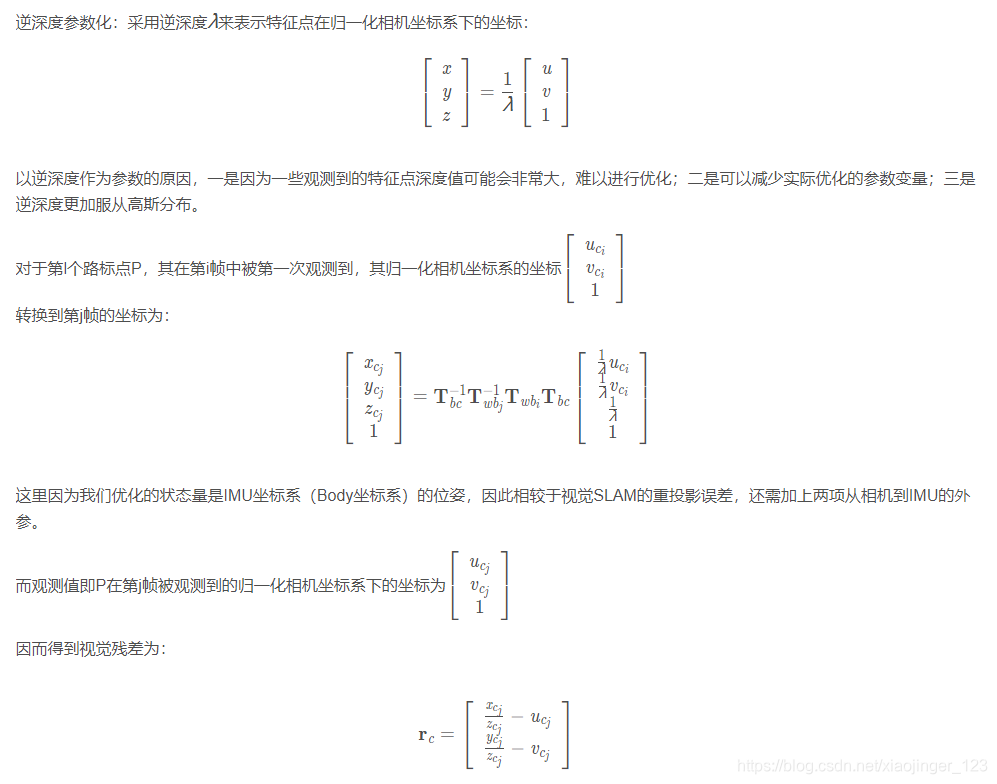
 逆深度参数化
逆深度参数化
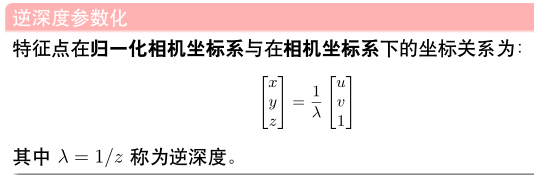
逆深度作为参数原因:1)观测到的特征点深度可能非常大,难以进行优化;2)可以减少实际优化的参数变量;3)逆深度更加服从高斯分布。这里特征点的逆深度在第i帧初始化操作中得到。
以上是对针孔相机模型的视觉残差,而在VINS论文中其实显示的是对一般相机模型的视觉残差,即使用了广角相机的球面模型。用的是单位半球体的相机观测残差。是一个鱼眼
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5252
5252

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









