







 智能驾驶依赖感知类和定位类传感器收集环境信息。感知类包括摄像头、超声波雷达、毫米波雷达和激光雷达,负责车辆周围环境的实时感知,其中摄像头提供视觉信息,超声波雷达用于近距离探测,激光雷达提供高精度三维信息,毫米波雷达擅长长距离探测。定位类传感器如GPS和IMU提供车辆位置和运动状态。通过多传感器融合,自动驾驶系统能实现更准确的环境感知。
智能驾驶依赖感知类和定位类传感器收集环境信息。感知类包括摄像头、超声波雷达、毫米波雷达和激光雷达,负责车辆周围环境的实时感知,其中摄像头提供视觉信息,超声波雷达用于近距离探测,激光雷达提供高精度三维信息,毫米波雷达擅长长距离探测。定位类传感器如GPS和IMU提供车辆位置和运动状态。通过多传感器融合,自动驾驶系统能实现更准确的环境感知。
智能驾驶技术依赖于多种传感器来实现车辆的安全和有效操作。传感器主要包括感知类传感器、定位类传感器,能够收集周围的信息,包括其他车辆的位置和速度、行人、道路标志、交通灯状态和道路边界等,这些信息经过处理后,为系统提供了准确的环境模型和动态变化的数据,使得车辆能够“看到”并“理解”其所处的环境。在自动驾驶系统中,传感器大致可以分为两类:感知类和定位类。
⚫ 感知类传感器的主要任务是收集车辆周围环境的信息,它们相当于车辆的“眼睛”和“耳朵”,帮助车辆“看到”和“听到”周围的世界,包括摄像头、超声波雷达、毫米波雷达、激光雷达(LiDAR)等。
⚫ 定位类传感器是一类用于测量和确定物体位置、方向或运动状态的传感器。这些传感器通常能够提供有关物体在三维空间中的坐标、方位、速度和加速度等信息,包括 GPS、IMU 等。
感知类传感器
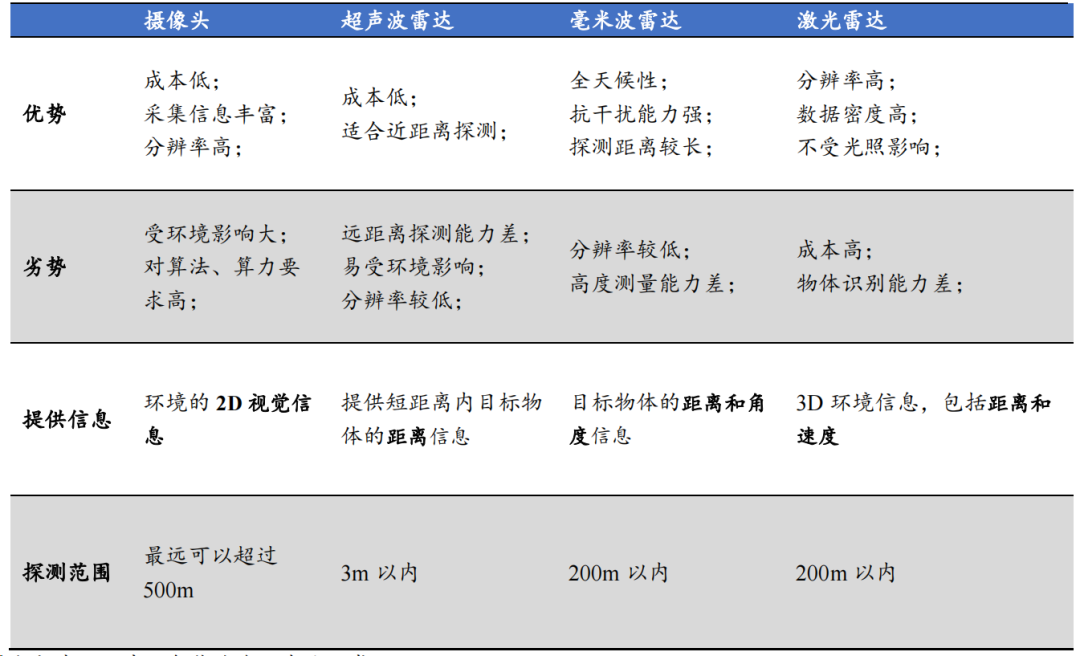
传感器是自动驾驶感知层的核心硬件,主要利用车载摄像头、激光雷达、超声波雷达、毫米波雷达等对车辆周边的环境进行实时感知。各自有独特的工作原理和作用,通过它们的数据融合,可以显著提高环境感知的准确性和可靠性。
主流车型上的感知类传感器类型
摄像头
摄像头在环境感知中的作用是提供视觉信息,如识别交通标志、信号灯、行道线等。通过图像处理和计算机视觉技术,可以实现对环境中物体的分类和识别。摄像头通过捕捉光线形成图像,这些图像能够提供丰富的颜色和纹理信息,帮助系统理解环境特征。根据摄像头安装位置及其视野不同,一般分为前视、后视、环视、侧视以及内视摄像头。
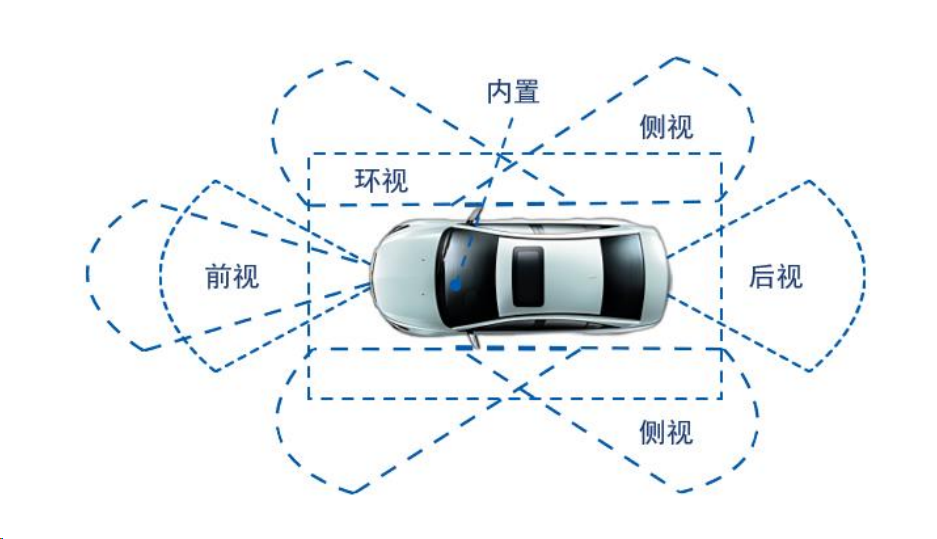
摄像头探测范围
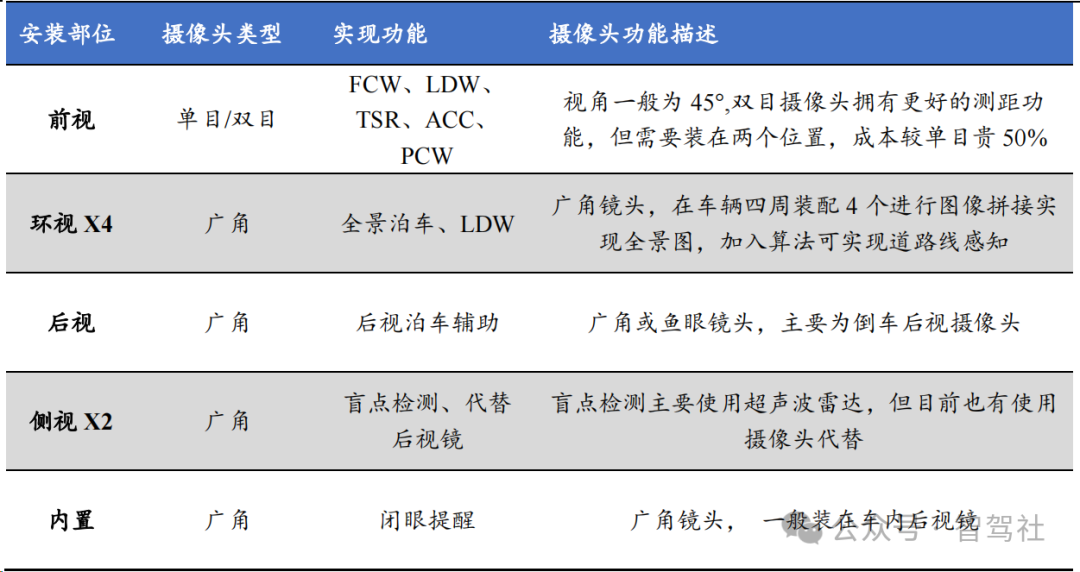
ADAS 主要摄像头应用
前视摄像头一般在风挡玻璃、内后视镜处,用于前向驾驶辅助的摄像头,主要是为了识别前方的道路车辆行人。图像传感器与 DSP 扩展的双核 MCU 配合,提供传入视频帧,进行图像处理,对道路前方情况进行监测,可以实现 FAM、LDW、ACC 等辅助驾驶功能。前视摄像头常见是单/双目摄像头,双目测距性能更好,但算法更复杂、价格更高。前视摄像头处的摄像头数量并不固定,比如特斯拉,配置了三个摄像头:
⚫ 前视窄视野摄像头,最大监测距离 250 米;
⚫ 前视主视野摄像头,最大监测距离 150 米;
⚫ 前视宽视野摄像头,最大监测距离 60 米。
前视摄像头是 ADAS 的核心摄像头,涵盖测距、物体识别、道路标线等,因此算法复杂,门槛较高。
特斯拉 Model 3 挡风玻璃后的三个前视摄像头
环视摄像头一般指安装在车辆前后车标或附近以及左右后视镜,主要用于识别停车通道标识、道路情况和周围车辆状况。环视摄像头使用多个摄像头的图像进行拼接,可以为车辆提供 360 度成像。现阶段,前视与环视是最广泛的摄像头应用。

大陆集团的 2019 年推出的一款前视+360 度可视的多摄像头集成系统
侧视摄像头一般安装于左右后视镜处或下方车身处,主要用于 BSD(Blind SpotDetection,盲区监视系统)。根据安装位置可以实现前视或后视作用。目前大部分主机厂会选择安装在汽车两侧的后视镜下方的位置。未来可能会将传统的光学后视镜用摄像头取代,变成应用 CMS 摄像头的电子后视镜。
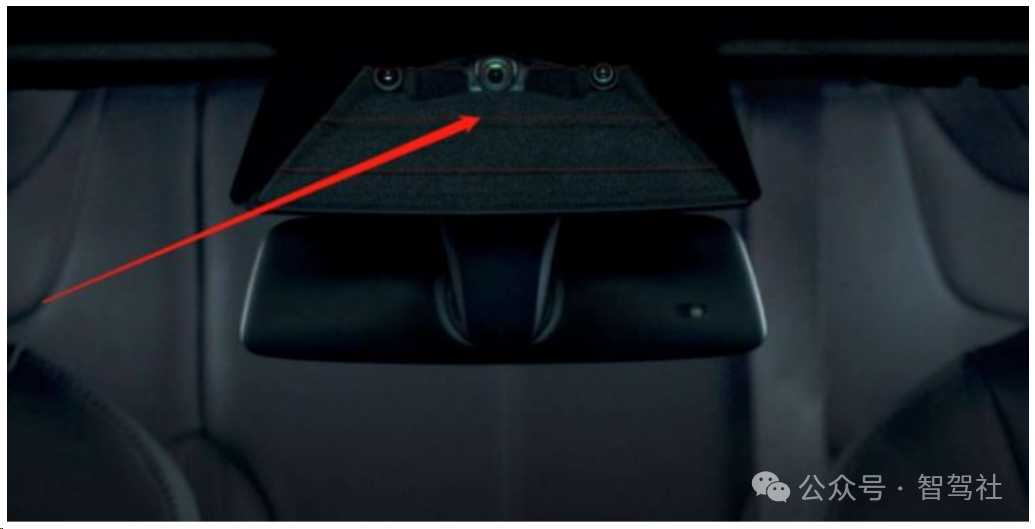
内置摄像头无固定位置,方向盘中、内后视镜上方、A 柱或集成于仪表显示屏处均有。车内摄像头 DMS(Driver Monitoring System,驾驶员监控系统)是一种安装在汽车内部的摄像头系统,旨在监控驾驶员的状态和行为,以提高驾驶安全性和舒适性。DMS 通常采用计算机视觉技术来识别和分析驾驶员的面部特征和行为,以检测驾驶员的疲劳、分心、打哈欠、闭眼、低头看手机等异常行为,并提供及时的警告或干预措施。

内置摄像头
摄像头目前是自动驾驶中最主流的传感设备ÿ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 5181
5181

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











