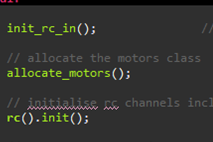
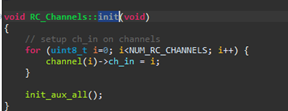
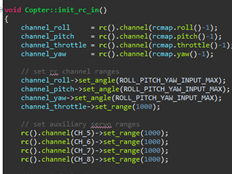
我们使用遥控器控制飞行器,每一路信号通过一路信道,在Ardupilot中信道与功能分配为:** 遥控器输入初始化 注册遥控器、传感器。 遥控器输入初始化。 横滚通道:[-4500,4500] ; 俯仰通道:[-4500,4500] ; 偏航通道:[-4500,4500] ; 油门通道:[0,1000] ; 其他外部通道值:0-10










 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 899
899











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






